|
|
[ electronic 159 ] [ Seitenende ] [ Programmieren ] [ Versuch 3 ] |
|
|||||||||||||||||||||||||||||||||||||||
|
|
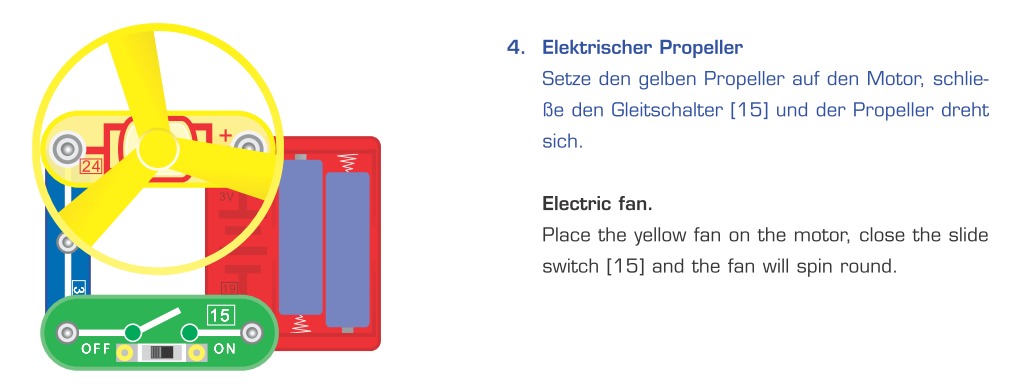
electronic 159 – Versuch 4 Elektrische
Kennlinie des Elektromotors
aufnehmen Wenn man sich den Versuch 4 „Elektrischer Propeller“ mit dem kleinen Elektromotor als
Antrieb so anschaut, dann fragt man sich, was sich mit dem Versuch noch so
anstellen lässt. Schließlich gibt es im Alltag, im Haushalt
viele Haushaltsgeräte mit Elektromotoren wie z.B. die elektrische Kafféemühle, den Mixer zum Zerkleinern von Früchten, um
einen Smoothie
herzustellen, den Föhn im Badezimmer zum Trocknen der Haare, die Waschmaschine, den
Raumventilator zum Kühlen der Raumluft im Hochsommer, den alten
Plattenspieler, den Batterie getriebenen CD-Player usw. Dabei kommen bei den unterschiedlichen
Haushaltsgeräten natürliche verschiedene Elektromotore wie z.B. einfache
Wechselstrommotore mit geringer Antriebsleistung (Raumventilator, z.B. bis 60
Watt Leistung, Plattenspieler, z.B. bis 25 Watt Leistung) oder mit größerer
Antriebsleistung (Universalmotor
bei der Waschmaschine z.B. bis 500 Watt Leistung) zum Einsatz. Besonders
interessant ist der digital gesteuerte und geregelte
Hochgeschwindigkeits-Gleichstrommotor im Dyson Haarföhn,
der mit bis zu 110 000 U/min rotiert, je nach Gebläsestufe. Da unser kleiner Elektromotor von zwei 1,5 Volt in Serie geschalteten Batterien vom Typ „Mignon AA“ in der Batteriehalterung [19] angetrieben wird,
handelt es sich bei diesem um einen Gleichstrommotor:
(Zum Vergrößern bitte
auf das Bild klicken!) Da wir in der westlichen Welt als Rechtshänder
stets von links nach rechts schreiben, lesen wir auch den Schaltungsaufbau von links nach
rechts, d.h. von der Batteriehalterung
[19]
links nach rechts zum Schiebeschalter [15] und über den Gleichstrommotor [24] wieder nach links
zurück (siehe unten)! Dabei gilt es aus Sicherheitsgründen zu beachten, dass die Stromzufuhr links vom Pluspol der Batteriehalterung [19] nach rechts zum Schiebeschalter [15] unterbrochen wird:
(Zum Vergrößern bitte auf
das Bild klicken!) Wie man im obenstehenden Bild sieht, sollte
die Unterbrechung der Stromzufuhr
mittels Schiebeschalter [15] nicht im
Stromrückfluss zur Batteriehalterung
[19]
hin erfolgen, sondern unmittelbar nach der Stromversorgung, d.h.
hinter dem Pluspol der Batterien, sodass die nach dem Schiebeschalter [15] folgenden Bauelemente im ausgeschalteten
Zustand immer stromlos
sind! Wenn man den Gleichstrommotor [24] mit der richtigen Polung anschließt,
d.h. mit dem Pluspol (+) über den Schiebeschalter
[15]
an den Pluspol (+) der Batteriehalterung
[19],
dann sollte dieser sich nach dem Einschalten im Uhrzeigersinn rechts herum
drehen. Selbstverständlich lässt sich der Gleichstrommotor [24] aber auch durch Umpolen so in Betrieb nehmen, dass er sich links
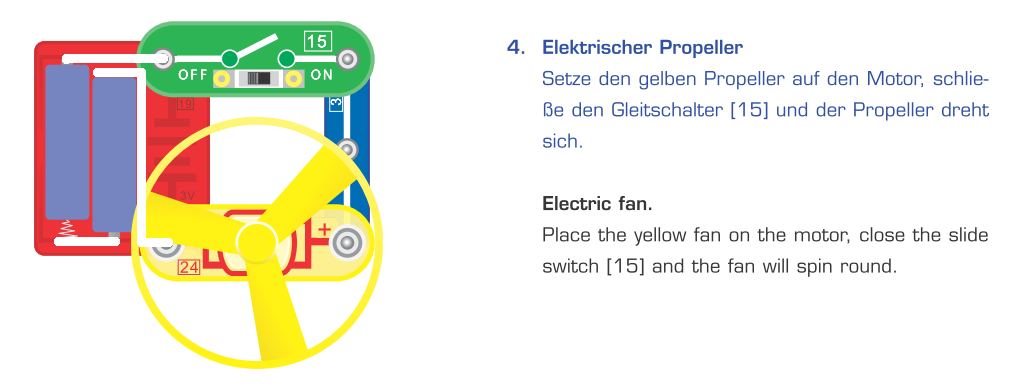
herum dreht. Wenn man
beim regulären Betrieb des Motors rechts herum befürchtet, dass das Flügelrad bzw. der Propeller bei höherer Drehzahl sich
verselbständigt und abhebt, dann muss man den Gleichstrommotor
[24] durch Umpolen der Anschlüsse nur links herum laufen lassen,
sodass der Luftstrom nach oben geht und der Propeller nicht
abheben kann, weil er nach unten auf die Montageplatte gedrückt wird. Wenn man die obenstehende Schaltung aufbaut
und den Gleichstrommotor [24] erstmalig in Betrieb
nimmt, indem man diesen am Schiebeschalter
[15]
einschaltet, dann fragt man sich sofort, wie viel Strom
dieser „verbraucht“. Aber als angehende Elektrotechniker, Elektroniker wissen
wir natürlich, dass der kleine Motor keinen Strom verbraucht, sondern in Form
von elektrischer Energie Wel aufnimmt und diese sofort in mechanische
Antriebsenergie Wmech umwandelt, sodass
sich der Rotor immer schneller dreht bis dieser abhebt und davon fliegt. Wie aber lässt sich
der volkstümlich sogenannte Stromverbrauch messen? Ganz einfach
durch unser selbst gebasteltes Digital-Voltmeter (= Spannungsmesser)
in Form des „Calliope mini“- oder
des älteren BBC „micro:bit“-Rechners nebst entsprechendem „Python“- oder „JavaScript“-Programm (siehe Webverzeichnis mini-programm_03_19.py). Konkret geht es dabei um das Messen mehrerer
unterschiedlicher (Betriebs-) Spannungen am Gleichstrommotor [24] mit dem Ziel eine entsprechende Spannungsmessreihe mit IMotor = f (UMotor) aufzunehmen und in
einer Wertetabelle zu
erfassen:
Dabei bezeichnet UMotor die unabhängige
Variable und die Ergebnisgröße IMotor die abhängige Variable. Demzufolge
benötigen wir neben dem (Digital-) Voltmeter auch noch ein entsprechendes Amperemeter (= Strommessgerät)
zum Messen der Stromstärke IMotor in Milliampere [mA]. Um die Stromstärke IMotor des Gleichstrommotor [24] mit dem Amperemeter messen zu können, muss man den Stromkreis auftrennen oder. das Strommessgerät parallel zum Schiebeschalter [15] anschließen, sodass
der Stromkreis durch die
Strommessung mit dem Amperemeter wieder geschlossen wird und man den Schiebeschalter nicht mehr
betätigen muss!
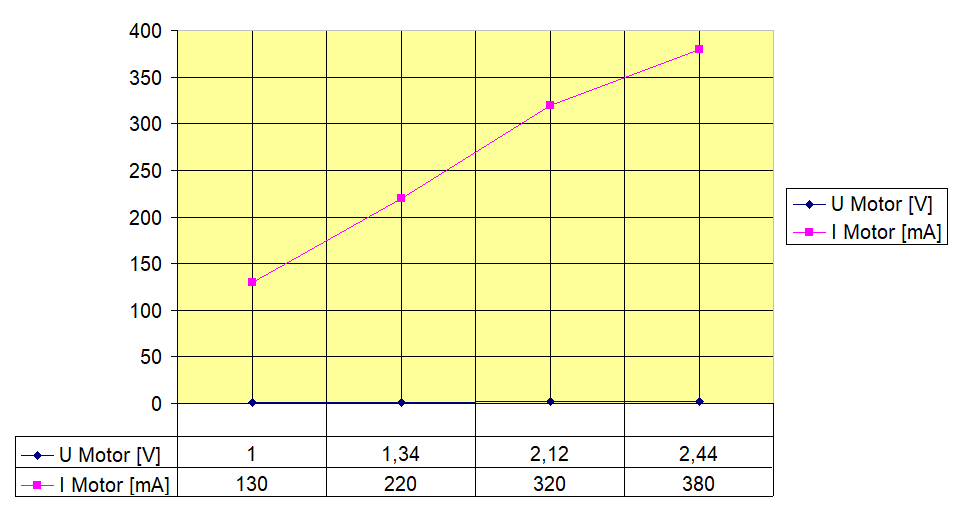
Wenn man die (x, y)
bzw. (U, I)-Messpunkte in das untenstehende Koodinatensystem einträgt, dann lässt
sich der sogenannte Graph der Funktion
mit IMotor = f (UMotor) wie folgt zeichnen:
(Zum Vergrößern bitte
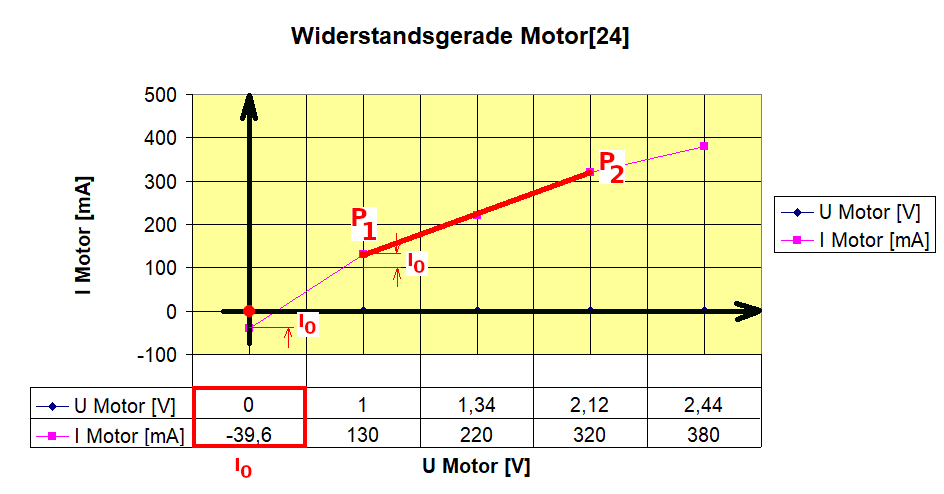
auf das Bild klicken!) Wie man im obenstehenden Diagramm sieht,
flacht die Motorkennlinie IMotor = f (UMotor) ab dem dritten
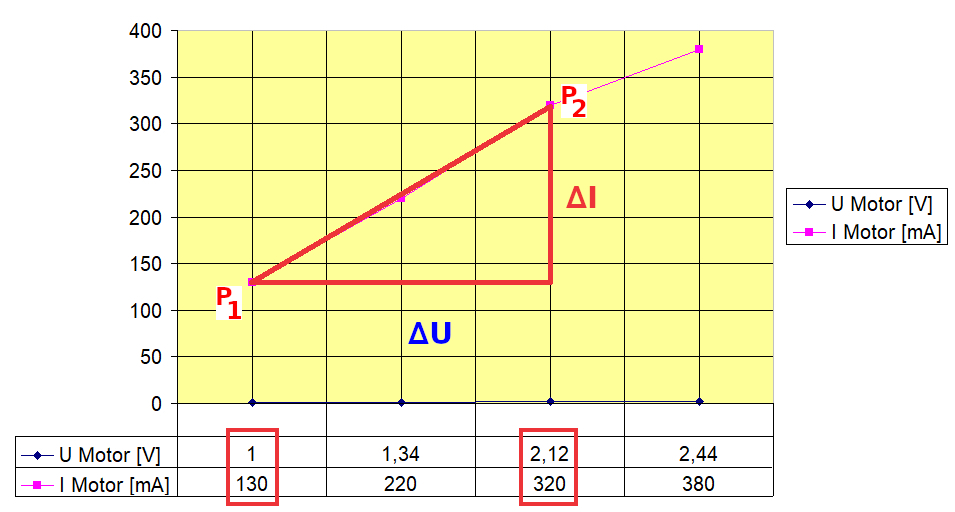
Messpunkt, d.h. bei UMotor = 2,12 V deutlich ab. Für die ersten drei Messpunkte lässt sich aber
trotzdem das entsprechende Steigungsdreieck
einzeichnen, da die Kennlinie in diesem Abschnitt
nahezu linear (= gleichmäßig, gleichförmig mit konstanter
Steigung) verläuft:
(Zum Vergrößern bitte
auf das Bild klicken!) Mittels des Differenzenquotienten ∆UMotor / ∆IMotor = 1
/ ( ∆IMotor / ∆UMotor ) = 1 / GSteig = RSteig lässt sich zunächst
nur die mathematische Steigung a (= Steilheit der
Widerstandsgeraden) gemäß der Zwei-Punkte-Form
wie folgt berechnen: a = y2 - y1 / x2
- x1 = y2 - y1
/ ( x2 - x1
) → mit y2
> y1 und x2
> x1 Einsetzen in die Geradengleichung liefert: y = f(x) = ax + b → mit b = Parallelverschiebung aus dem Ursprung des Koordinatensystems Demzufolge berechnet sich die Steigung(!) der Widerstandsgeraden(!) wie folgt: GSteig =
1 / RSteig = 1 / ( ∆UMotor / ∆IMotor ) → GSteig = Leiterwert des Steigungsdreiecks! RSteig = ( ∆UMotor / ∆IMotor ) → RSteig = Widerstand des Steigungsdreiecks! IMotor = f(UMotor) = GSteig * UMotor + I0 → = f(UMotor) = ( 1 / RSteig ) * UMotor + I0 Geradengleichung der Widerstandsgeraden: Obwohl die
Geradengleichung wegen ihrer mathematischen Schreibweise und wegen I0
anfangs etwas gewöhnungsbedürftig ist, ist sie dennoch ein mächtiges
Werkzeug, das sich praktisch immer und überall anwenden lässt. Demzufolge
lässt sich die Geradengleichung nicht nur auf das
obenstehende Steigungsdreieck anwenden, sondern
auch für Spannungsmessungen
jedweder Art wie z.B. beim unbelasteter/belasteter Spannungsteiler,
verketteten Spannungen oder bei Spannungsmessungen mit Konstantstromanteil I0: IMotor = 1 / Rges * UMotor + I0 → mit I0 = Konstantstrom → Parallelverschiebung → und Rges = RMotor + RMess Wie man bei der Geradengleichung sieht, besteht diese u.a.
aus der unabhängigen Variablen UMotor, d.h. der Spannung,
die zwischen den Anschlussklemmen
am Motor[24] anliegt. Wegen des in Reihe
zum Motor[24] geschalteten Messwiderstandes RMess für die spätere
Strommessung handelt es sich bei der Spannung
UMotor am Motor um einen
sogenannten Spannungsabfall.
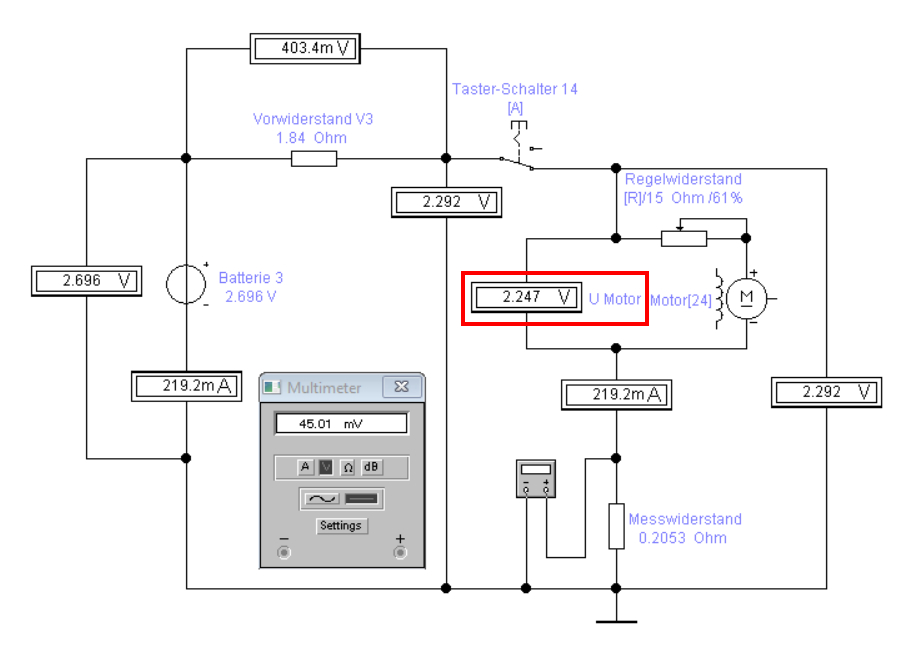
Dabei wird der Spannungsabfall parallel zum Motor[24] und nicht zwangsläufig gegen Masse („┴“) gemessen:
(Zum Vergrößern bitte
auf das Bild klicken!) In der Praxis verhält es sich aber oftmals so,
dass der Kabelanschluss am Motoranschlussklemmbrett des Motors nicht frei
zugänglich ist, sodass der Betriebselektriker aus Bequemlichkeit heraus die Spannung am Motor[24] lieber direkt gegen Masse („┴“) misst, und er es
dabei sofort mit einer verketteten Spannung zu tun hat, die den Spannungsabfall am Messwiderstand RMess mit einbezieht,
sodass insgesamt mehr Spannung gemessen wird als der
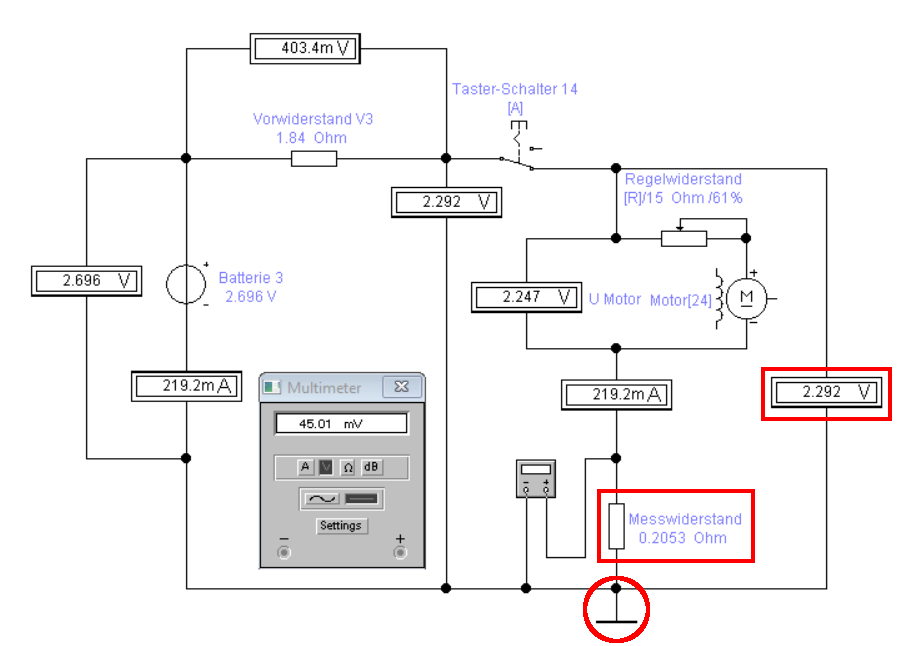
Motor[24] tatsächlich „abbekommt“:
(Zum Vergrößern bitte
auf das Bild klicken!) Wie man aber anhand des roten Kastens
„Messwiderstand“
erkennt, gibt es im Strompfad des Motors[24], d.h. in Serie
nachgeschaltet noch den Messwiderstandes RMess zur späteren
Strommessung, sodass es sich bei der Spannungsmessung des Motors[24] um eine verkettete Spannung
handelt und zwar um die der Spannungsversorgung
Uges = 2,292 V mit Uges > UMotor = 2,247 V. Demzufolge müsste sich der Elektriker vor
der Spannungsmessung gegen Masse
(„┴“) erkundigen, ob es im Strompfad des Motors[24] noch etwaige in Serie nachgeschaltete Verbraucher hin zum Masseanschluss gibt! Nur wenn der Elektriker weiß, dass es im Strompfad des Motors[24] noch einen in Serie
nachgeschalteten Messwiderstand RMess gibt, kann er dessen Spannungsabfall aus der verketteten
Gesamtspannung Uges wie folgt
herausrechnen: UMotor = Uges - UMess → Uges = U+3v3 lässt sich beim „Calliope mini“ am Port „Pin +3v3“ („+“)
gegen Masse („┴“) bzw. („-“) messen! → UMess lässt sich beim „Calliope mini“ am Port1 „Pin P1“ gegen Masse („┴“) bzw. („-“) messen! = 2,292 V - 45,01 mV = 2,292
V - 0,04501 V ≈ 2,247 V →
Nicht gegen Masse („┴“) messen! UMotor = RMotor * IMotor = RMotor
* IMess →
wegen Reihenschaltung RMotor + RMess mit IMotor = IMess
UMess = Uges - UMotor = 2,292 V - 2,247 V = 0,045 V = 45 mV = IMess * RMess = IMotor
RMess → IMotor = UMess / RMess = 45,01 mV / 0,2053 Ω = 45,01 Dabei
gilt es zu beachten, dass sich der Motorstrom
IMotor nur berechnen lässt,
wenn man die Größe des
Messwiderstandes RMess kennt! - Mit der Geradengleichung und dem Konstantstrom I0 = 0 lässt sich jetzt auch
noch der Gesamtwiderstand
Rges wie
folgt berechnen: IMotor = 1 / Rges * UMotor + I0
= 1 / ( RMotor + RMess ) * UMotor Doch was bedeutet es, wenn der Konstantstrom I0 = 0 ist? Wenn es generell
keinen Konstantstrom I0 gibt, dann gibt es auch keine Konstantstromquelle. Aber ob dem wirklich
so ist, wissen wir (noch) nicht. Wenn es an der Stelle IMotor = f(U) = f(UMotor) → I0 = f(U0 = 0) = 0 →
I0 = 0 keinen Konstantstrom
I0 gibt, dann folgt für
die Geradengleichung: IMotor = 1 / RMotor * UMotor →
RMotor = UMotor
/ IMotor = 2,247 V / 221,7 mA
= 0,0101353 KΩ ≈
10,14 Ω Rges = RMotor
+ RMess
= 10,14 Ω + 205,30 mΩ = 10,14 Ω + 0,20530 Ω ≈ 10,35 Ω
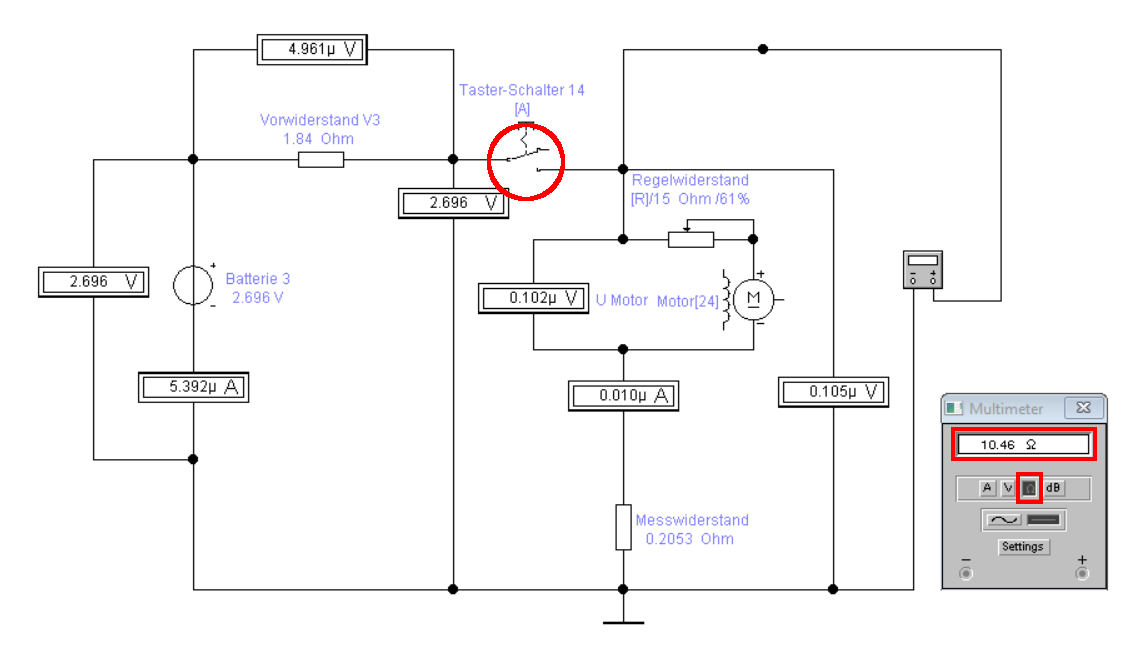
Wir machen die Probe auf’s
Exempel, d.h. (Lehr-) Beispiel, indem wir den Taster-/Umschalter [14] durch Tastendruck
„A“ öffnen, sodass keine
Stromversorgung mehr erfolgt! Anschließend schalten wir die Elektronik-Simulation „Electronics Workbench“ am Netz-/Kippschalter
ein (oben rechts) und messen den Gesamtwiderstand der Schaltung, der wegen
der vielen Spannungs- und Strommessgeräten etwas höher ausfällt als unser
Rechenergebnis von Rges = 10,35 mΩ:
(Bild vergrößern: auf
Bild klicken! Webverzeichnis schaltung_04-05.ewb Als Zwischenfazit lässt sich festhalten, dass
sich Spannungsmessungen auch mit verketteten
Spannungen problemlos
durchführen lassen. Allerdings
sollte man sich bei Spannungsmessungen stets bewusst sein, dass man bei
Spannungsgsmessungen gegen Masse
(„┴“) oftmals auch
mit verketteten Spannungen rechnen
muss. Wenn es aber darum geht mit der Geradengleichung I = 1 / R * U + I0 zu arbeiten, dann kommt man um den Differenzenquotienten R = ∆U / ∆I, d.h. um den Steigungskoeffizienten der Widerstandsgeraden in Form des Leitwerts G = 1 / R = ∆I / ∆U nicht umhin.
Dies gilt dann auch für die ganz oben stehende
Wertetabelle, das Steigungsdreieck und den Steigungswiderstand: RSteig = ∆U / ∆I = ( U2 - U1
) / ∆I =
( UPin P2 - UPin P1 ) / ∆IMotor =
( 2,12, V – 1,0 V ) / 190 mA → … siehe Wertetabelle sowie
Steigungsdreieck weiter oben! = 0,005895 KΩ = 5,895 Ω =
( UPin P2 - UPin P1 ) / IMess → IMess = UMess / RMess → UMess = UPin P1, ┴ gegen Masse („┴“) = ( UPin P2 - UPin P1 ) / ( UMess
/ RMess ) = ( UPin P2 - UPin P1 ) / ( UPin P1,
┴ / RMess ) IMotor = 1 / RMess
* UPin P1,
┴ → Iges = 1 / RSteig * UPin P1, ┴ + I0 Berechnung des Konstantstromes
I0 anhand des Steigungsdreiecks (siehe oben) … am Schnittpunkt
mit der senkrechten IMotor-Achse mit UMotor = 1 V: IMotor P1 = 1 / RSteig * UMotor + I0 → I0 = I Motor P1 - 1 / RSteig * UMotor = 130 mA - 1 / 5,895 Ω * 1 V
= 0,13 A - 0,1696 A/ … am Schnittpunkt mit der senkrechten IMotor-Achse mit UMotor = 2,12 V: I0 = I Motor P2 - 1 / RSteig * UMotor = 320 mA - 1 / 5,895 Ω * 2,12 V
= 0,32 A - 0,1696 A/ Probe: IMotor P2 = 1 / RSteig * UMotor P2 + I0
= 1 / ( 5,895
V/A )
* 2,12 V
+ ( -39,6 mA ) = 0,1696 A/ = 359,55 mA - 39,6 mA =
319,95 mA ≈ 320 mA þ Jetzt wo wir wissen, wie sich
der Konstantstrom I0
berechnen lässt, nämlich mittels der Geradengleichung im Schnittpunkt mit
der senkrechten „IMotor“-Achse,
können wir den Konstantstrom
I0 wie folgt auch im Punkt P1 berechnen: IMotor P1 = 1 / RSteig * UMotor P1 + I0 → I0 =
IMotor P1 - 1 / RSteig * UMotor P1 → Messwerte
vom Punkt P1 einsetzen! =
130 mA
- 1 / 5,895 Ω * 1 V = 0,13 A
- 0,1696 A/ = 0,13 A - 0,1696 A = - 0,0396 A = - 39,6 mA Aber das hatten wir ja
bereits (siehe oben), d.h. wir haben tatsächlich die richtigen Werte
eingesetzt! Mal sehen, ob sich die
Berechnung des rechnerischen Konstantstroms I0 auch auf den Koordinatenursprung
anwenden lässt: I0 = IMotor - 1 / RSteig * UMotor →
„Messwerte“ vom Koordinatenursprung einsetzen! =
- 39,6 mA - 1 / 5,895 Ω * 0 V = -39,6 mA Wer hätte das gedacht, dass
die Mathematik auch ganz trivial, d.h. einfach, simpel, sein kann! J Wenn man sich die
obenstehende Wertetabelle im linearen
Bereich zwischen den Messpunkten
P1 und P2 betrachtet, dann
könnte man auf die Idee kommen und den elektrischen Widerstand RMotor des Motors - also nicht Steigungswiderstand RSteig
- einfach mittels des Ohmschen Gesetzes (→ohne Konstantstrom I0 ) wie
folgt berechnen: Punkt P1 = ( 1 V /
130 mA ) RMotor = UMotor / IMotor
= 1 V / 130 mA = 0,00769 KΩ = 7,69
Ω → FALSCH! Punkt P2 = ( 2,12
V / 320 mA ) RMotor = UMotor / IMotor
= 2,12 V / 320 mA = 0,006625 KΩ = 6,625
Ω → FALSCH!
Wie wir ja inzwischen wissen,
ist das Steigungsdreieck des Motors um den Konstantstrom I0
= - 39,6 mA nach unten parallel aus dem Koordinatenursprung
heraus verschoben, sodass
wir eben nicht das Ohmsche
Gesetz in seiner Spezialform(!) mit der Widerstandsgeraden durch den Koordinatenursprung sowie mit dem Konstantstrom I0 = 0 anwenden dürfen:
(Zum
Vergrößern bitte auf das Bild klicken!)
Berechnung des Motorwiderstandes RMotor
mittels der Geradengleichung: Punkt P1 = ( 1 V /
130 mA ) IMotor =
1 / RSteig * UMotor + I0 = 1 / ( ∆UMotor / ∆IMotor ) * UMotor + I0 → Steigungswiderstand RSteig = ∆UMotor / ∆IMotor = 1,12 V / 190 mA = 0,005895 KΩ = 5,895 Ω = 1 / ( 1,12 V / 190 mA ) * UMotor - 39,6 mA =
1 / ( 5,895 V/A
) * 1,0 V - 39,6 mA
= 1 / ( 5,895
V/A ) * 1,0 V - 0,0396 A = 0,1696
A - 0,0396 A = 0,13 A = 130 mA þ
IMotor =
1 / RSteig * UMotor + I0
IMotor - I0 = ( 1 / RSteig ) * UMotor ( IMotor - I0 ) / UMotor = 1 / RSteig UMotor / ( IMotor - I0 ) = RSteig þ UMotor = RSteig * ( IMotor - I0 ) RMotor = UMotor / IMotor = RSteig * ( IMotor - I0 ) / IMotor RMotor = RSteig * ( 1 - I0 / IMotor
) = 5,895 Ω * ( 1 + 39,6
mA / 130 mA ) = 5,895 Ω * 1,305 = 7,693
Ω þ
Wie man sieht, ist der Motorwiderstand RMotor = 7,693 Ω des Elektromotors deutlich kleiner ist als der der Glühlampe [18] mit RGlühlampe = 8,33 Ω. - Im Zusammenhang mit der Aufnahme der Messreihe
in Form der Wertetabelle gilt es noch die
Frage zu klären, wie die vier verschiedenen Spannungswerte des Elektromotors zustande gekommen
sind. Schließlich gibt es im Elektronik-Baukasten
„electronic
129“ kein
regelbares Netzgerät für einstellbare
Betriebsspannungen im Bereich [ 0 … 6 V ].
Dabei ist die Lösung einfacher als man denkt.
Schließlich bastelten wir uns im Versuch 3 und bei der Programmierung
3 nicht nur ein brauchbares Digital-Voltmeter, sondern untersuchten
mit diesem auch die (Rest-)
Ladekapazität
verschiedener mehr oder weniger stark entladener 1,5 V Batterien vom Typ
„Mignon AA“. So kam z.B. beim ersten Messwert ( 1 V / 130
mA ) eine 1,5 V Batterie mit einer Restkapazität von nur 60 % zum Einsatz,
beim zweiten Messwert ( 1,34 V / 220 mA ) wurde hingegen eine 1,5 V
Batterie mit einer Restkapazität von 86 % verwendet, beim dritten Messwert
wurden dann schon zwei 1,5 V Batterien in Serie geschaltet, und zwar die erste 1,5 V Batterie mit 60 %
und die zweite mit 86 % Restkapazität. Beim vierten Messwert ( 2,44 V / 380 mA ) kamen dann ebenfalls zwei 1,5 V Batterien in Serie geschaltet zum Einsatz und
zwar mit insgesamt 80 % Restkapazität. Wie man sieht, macht es Sinn, unterschiedlich
entladene 1,5 V Batterien bis hin zu einer Restkapazität von 60 %
aufzubewahren, da sich mit diesen und auch mit noch fabrikneuen 1,5 Volt
Batterien jeweils in Einzelschaltung, Reihenschaltung sowie in Kombination hinsichtlich
der Restkapazität teils sehr unterschiedliche Gesamtspannungen realisieren
lassen, sodass sich jederzeit verschiedene Messreihen aufstellen lassen
(siehe oben). - Mit der
Spannung den Strom messen Bei der obenstehenden Wertetabelle
ging es um das Messen mehrerer
unterschiedlicher (Betriebs-) Spannungen am Gleichstrommotor [24] mit dem Ziel eine entsprechende Spannungsmessreihe mit IMotor = f (UMotor) aufzunehmen und in
einer Wertetabelle zu
erfassen. Dabei wurden die Spannungsmesswerte der Reihe nach mit
dem Digital-Voltmeter-Programm des „Calliope mini“-Rechners gemessen, während die
zu den Spannungsmesswerten zugehörigen Stromstärken mit einem Multimeter als Strommessgerät gemessen wurden. Diesbezüglich verhält es sich so, dass sich
mit einem Voltmeter (= Spannungsmessgerät) auch Ströme in Form der
Stromstärke messen lassen! Aber nur indirekt über den Spannungsabfall
UR Mess an einem in den Stromkreis
geschalteten Messwiderstand. Dabei wird der Messwiderstand RMess in Reihe mit dem zu messenden Lastwiderstand RMotor (= Gleichstrommotor [24])
geschaltet mit der Folge, dass sich durch das Einbringen des Messwiderstandes der Laststrom IMotor entsprechend verringert!
Beispiel: Wenn der in den Schaltkreis eingebrachte
Messwiderstand RMess = 1 Ω beträgt, dann
berechnet sich der neue, verringerte Laststrom IMotor
des Gleichstrommotors [24] wie folgt: RLast, ges = RMess
+ RLast = RMess
+ UMotor / IMotor
=
1 Ω + 1 V / 130 mA = 1 Ω
+ 0,00769 KΩ = 1 Ω + 7,69 Ω
= 8,69 Ω ≈ 8,7 Ω ILast, neu = UMotor
/ RLast, ges = 1 V / 8,7 Ω = 0,1149 A = 114,9 mA (= - 11,6 %) Wie man sieht, ergibt sich durch das
Hinzuschalten des Messwiderstandes RMess = 1 Ω ein Messfehler von - 11,6 %,
was schon ganz ordentlich und demzufolge nicht zu vernachlässigen ist!
Frage: Wie klein muss der Messwiderstand sein bzw. welchen Widerstandswert muss der Messwiderstand haben, damit sich ein Messfehler von nur - 1,5 % einstellt? 100,0 %
→ 7,69 Ω 1,5
% → x Ω x = 7,69 Ω / 100 % * 1,5 % = 0,11535 Ω ≈ 0,115 Ω Mit dem kleineren Messwiderstand ergibt sich
nun auch ein insgesamt kleinerer Gesamtwiderstand, der sich wie folgt
berechnet: Rges, neu = RMess,
neu + RLast = RMess,
neu + UMotor / IMotor
= 0,115 Ω + 1 V / 130 mA = 0,115 Ω + 0,00769 KΩ = 0,115 Ω + 7,69 Ω = 7,805 Ω ≈ 7,8 Ω ILast, neu = UMotor
/ RLast, ges = 1 V / 7,8 Ω = 0,1282 A = 128,2 mA (= - 1,385 %) Mit einem Messfehler von ± 1,5 % würde es sich bei der
Strommessung bereits um eine Präzisionsmessung handeln, die es
ansonsten nur bei entsprechend teuren analogen Drehspulmessgeräten
mit einer hochempfindlichen Drehanker-Messspule (ISpule
= 50 µA), Messerzeiger
und Spiegelskala
gibt. Berechnen wir abschließend noch den Spannungsabfall UMess, neu am neuen Messwiderstand RMess, neu wie folgt: UMess, neu = IMotor,
neu * RMess, neu =
128,2 mA * 7,8 Ω = 999,96 mV = 0,99996
V ≈ 1 V Bevor wir uns mit dem nachfolgenden
Sachverhalt auseinandersetzen, stellt sich die Frage nach dem Unterschied
zwischen den beiden Dezimalzahlen 1023 und 1024. Wandelt man die Dezimalzahl 1023 zur Basis 10
in eine Binärzahl zur Basis 2 um, so folgt: 102310 = 11 1111 11112 Addiert man zu der Binärzahl 11 1111 11112
eine binäre +12, so folgt: 100
0000 00002 Wandelt man die Binärzahl 100 0000 00002 wieder in eine
Dezimalzahl zurück, so folgt: 100
0000 00002 = 102410 Dabei verhält es sich so, dass die Binärzahl 100 0000 00002 genau eine
Stelle mehr hat als die die nächst kleinere Binärzahl 11 1111 11112
Wenn man die beiden Binärzahlen untereinander
schreibt, dann sieht man den Unterschied auch mathematisch
Wenn man zu der Binärzahl 11 1111 11112
eine binäre +12 addiert, dann gibt es im Binärsystem bei dem wir
immer nur mit zwei Zahlen von 0 bis 1 zählen einen binären
Überlauf auf die nächst höhere Binärzahl 100
0000 00002, weil die binäre Addition 12 +12 = 012 +012
= 102 ergibt usw. Im Dezimalsystem wäre das
vergleichbar mit 99 999 99910 + 110 = 100 000 00010, das einem dezimalen
Überlauf auf die nächst höhere Dekade entspricht,
nämlich der 100sten Million. Beim Vergleich der beiden Dezimalzahlen 102310
und 102410 sieht man es der Dezimalzahl 102410
sozusagen von außen aus der Sicht des Dezimalzahlensystems nicht an,
dass diese bereits zur nächst höheren binären Dekade 100 0000 00002 gehört. Beim „Calliope mini“ mit den integrierten Analog-/Digital-Wandlern
bei den Ports „Pin P1“ und „Pin P2“
werden also immer Dezimalwerte aus
dem Bereich [ 0, …, 1023 ] eingelesen und intern binär
weiter verarbeitet, weil die ALU, engl. „Arithmatic
Logic Unit“ (= arithmetisch-logische Einheit) in
Form der internen Recheneinheit nur mit zwei binären Fingern
von 0 bis 1 rechnet. Während wir also mit den A/D-Wandlern stets Dezimalwerte aus dem Bereich [ 0, …, 1023 ] erfassen, haben wir es demzufolge immer mit insgesamt
1024 unterschiedlichen Werten
zu tun, da die Null mathematisch auch eine Zahl ist.
Frage: Weshalb ist es wichtig zu wissen, wie groß
bzw. klein der Spannungsabfall UMess, neu am neuen Messwiderstand RMess, neu ist? 1023 Messwerte → 3,3 V 1
Messwert → x V x = 3,3 V / 1023 * 1 = 0,003226 V = 3,226 mV ≈ 3,23 mV pro einzelnem
Bit = 3,23 mV/Bit = 3,23 mV Bit-1 Demzufolge beginnt der Messbereich der A/D-Wandler bei 3,3 V / 1023 Bit im Bereich [ 0, …, 1023
] = 3,23 mV / 1
Bit Gegenprobe: 3,23
mV/ Umgekehrt entspricht der Spannungsabfall UMess, neu am neuen Messwiderstand
RMess, neu = 0,115 Ω einem Bitwert
von: 3,3
V → 1023 Bit 1,0
V → x Bit x
= 1023 Bit / 3,3 V * 1,0 V = 310 Bit Dabei entspräche ein noch kleinerer
Spannungsabfall von z.B. UMess = 0,1 V
einem noch kleineren Bitwert: 3,3
V → 1023 Bit 0,1
V → x Bit x
= 1023 Bit / 3,3 V * 0,1 V = 31 Bit Dass der analoge Eingang am Port „Pin P1”
des „Calliope mini“ so empfindlich ist
und man mit diesem bereits mit wenigen Bit Spannungen im Millivoltbereich messen kann, ist dem
Umstand geschuldet, dass sich 1023 Bit auf einen Spannungsbereich von bis zu
3,3 V verteilen. Würden sich die 1023 Bit auf einen Spannungsbereich
von bis zu 300 V verteilen, dann sähe das Ganze schon anders aus: 1023 Messwerte → 300 V 1
Messwert → x V x = 300 V / 1023 * 1 = 0,293255132 V = 0,29326
V = 293,26 mV pro einzelnem Bit ≈ 293 mV/Bit Rund 293 mV/Bit ist angesichts der max. Spannung von bis zu 300 V
trotzdem ein sehr guter Wert, der die hohe Eingangsempfindlichkeit des analogen Eingangs am Port „Pin P1” bestätigt. Wenn es also darum geht, dass wir parallel zum
sehr kleinen Messwiderstand gemäß dem ohmschen Gesetz auch sehr kleine
Spannungen messen, dann spielen plötzlich kleine Bitwerte von z.B. 14 Bit (= 293 mV/Bit * 14 Bit = 4,102 V) eine große Rolle,
weil sich mit diesen kleinen Werten dicke, d.h. große Ströme bzw.
Stromstärken berechnen lassen: IMess = ILast
= IMotor = UMess
/ RMess = 4102 Unglücklicherweise verhält es sich bei unserem
„Digitalvoltmeter“-Programm „mini-programm_03_19.py“ leider so, dass die
am analogen Eingang vom Port „Pin P1“ gemessenen Bitwerte nicht angezeigt werden,
da wir diesen zum damaligen Zeitpunkt aus der Anwendersicht heraus keine
Bedeutung beigemessen haben. Schließlich sieht man es den kleinen Bitwerten
nicht an, dass sich mit diesen auch dicke Stromstärken des Gleichstrommotors [24] berechnen und im 9 x
9 großen LED-Matrix-Display des „Calliope mini“ als Laufschrift anzeigen
lassen. Demzufolge kommen wir nicht umhin das bisherige „Digitalvoltmeter“-Programm entsprechend umzuprogrammieren und zu
erweitern. Batterie-Tester mit Bit-Anzeige [ programmieren ] |
|
|||||||||||||||||||||||||||||||||||||||
|
|
[ electronic 159 ] [ Seitenanfang ] [ Programmieren ] [ Versuch 3 ] |
|