|
|
[ Proxi-Roboter
] [ Seitenende ] [ Montage 1 ] [ Coding 2 ] |
|
||||||||||||||||||||||||||||||
|
|
KOSMOS – der programmierbare Proxi-Roboter Rechts-
und Linksdrehung beim Proxi-Roboter Wir befinden uns auf dem Windows-PC, starten den Microsoft
„MakeCode“-Editor als „Google Chrome“-App(!) durch Mausklick auf
das Icon
(Zum Vergrößern bitte
auf das Bild klicken!) Dann erweitern wir das Projekt „proxi-roboter, p-03“ wie folgt
(Zum Vergrößern bitte
auf das Bild klicken!) Wie man im obenstehenden Screenshot sieht,
meldet sich der Proxi-Roboter nach dem Programmstart mit der Laufschriftanzeige „Ready!“, d.h. „Fertig!“ im Sinne von „Alles okay!“.
Nachdem die Laufschrift durchgelaufen ist, wird das Tonsignal „Mittleres
C“ zu
Gehör gebracht, der Bildschirm (= 5 x 5 Matrix LED-Display) gelöscht und das Symbol „Häkchen P“ angezeigt. Damit soll ebenfalls signalisiert
werden, dass alles in Ordnung ist. Dabei wird das „Häkchen P“ zunächst dauerhaft im Display angezeigt. Man
kann aber das „Häkchen P“ auch erst später, nachdem das Programm
vollständig abgearbeitet wurde, anzeigen lassen:
(Zum Vergrößern bitte
auf das Bild klicken!) Über die Art und Weise, ob und wie der
Proxi-Roboter mit dem Anwender kommuniziert, kann man natürlich streiten.
Dabei könnte man die optische und akustische Signalisierung,
darüber was der Roboter gerade macht bzw. gemacht hat, auch als überflüssig
abtun. Trotzdem bin ich der Meinung, dass die optische
und akustische Kommunikation
mit dem Anwender Sinn macht, da man anhand der Signalisierung genau verfolgen kann, ob der Roboter auch das macht, was er machen soll bzw. was programmiert
wurde! Schließlich findet man sich anhand der Signalisierung auch schneller und besser im Programm zurecht:
(Zum Vergrößern bitte auf
das Bild klicken!) Bezüglich der Programmierung des Antriebsmotors P13 für die
Vorwärtsbewegung geht es darum herauszufinden, wie lange ein kompletter
Umlauf des Motors nebst
Untersetzung des Getriebes andauert, um die Umlaufzeit für einen
Umlauf des Motors später einem Vollkreis von 360 Grad zuordnen zu
können. Deshalb nähern wir uns schrittweise der Umlaufzeit für einen Vollkreis
der beiden schwarzen Zahnräder B9
(links) und A6 (rechts) an:
(Zum Vergrößern bitte
auf das Bild klicken!) Mit dem Statement
<pausiere (ms) 1210> lässt sich ziemlich
genau ein Vollkreis umrunden:
(Zum Vergrößern bitte
auf das Bild klicken!) Wie man im obenstehenden Screenshot sieht,
dauert ein vollständiger Umlauf
für der beiden schwarzen Zahnräder B9
(links) und A6 (rechts) tUmlauf = 1210 ms = 1,21 s:
(Zum Vergrößern bitte
auf das Bild klicken!) Wie man ferner im obenstehenden Bild im rot
umrandeten Oval sieht, stehen sich die beiden Markierungspfeile "! der beiden schwarzen Zahnräder B9 (links) und A6
(rechts) nach einem Umlauf,
d.h. nach tUmlauf = 1210 ms
= 1,21 s nicht mehr exakt gegenüber. Demzufolge muss man im laufenden
Betrieb mit n Umläufen stets damit rechnen, dass es z.B. aufgrund von, wenn
auch geringen, Spannungsschwankungen bei der 5 V USB-Stromversorgung über das „Micro USB 2.0“-Kabel oder durch die Erwärmung des Antriebsmotors
P13 zu mehr oder weniger großen oder kleinen Abweichungen bei der Drehzahl des Motors und damit auch bei der zugrunde gelegten Umlaufzeit kommt. Wenn aber Versorgungsspannung und Betriebstemperatur des Proxi-Roboters die Motordrehzahl n und damit die Umlaufzeit tUmlauf beeinflussen, dann
müssen wir diese im Auge behalten, d.h. beobachten und diese der jeweils
zugrunde gelegten Umlaufzeit zuordnen. Mathematisch sagt man dazu, dass die Motordrehzahl n eine Funktion f
der Spannung UMotor des Motors ist: n = f( UMotor ). Praktisch bedeut dies, dass die Motordrehzahl n von der am Motor anliegenden Spannung UMotor abhängt bzw. abhängig
ist. Wenn wir den Proxi-Roboter mit den 4 Mignon-Batterien
vom Typ „AA“ im Batteriefach
P15 betreiben,
(Zum Vergrößern bitte
auf das Bild klicken!) dann ließe sich der Motor ohne Spannungsstabilisierung und ohne Regelung mit einer
Versorgungsspannung von max. UBatt = 4 * 1,5 V = 6,0 V betreiben.
Da der Motor aber an der Zusatzplatine P16 mit den vier Infrarot-LEDs angeschlossen
ist und sich u.a. zeitabhängig steuern lässt, kann man davon ausgehen,
dass die tatsächliche Betriebsspannung des Motors wegen der vorgeschalteten Elektronik nebst des „micro:bit“-Rechners entsprechend niedriger ausfällt. Wenn man aber den Proxi-Roboter u.a. beim Programmieren mit dem „Micro USB 2.0“-Verbindungskabel und der USB-Stromversorgung vom Windows-PC aus betreibt, dann beträgt die „USB 2.0“-Spannung für die Stromversorgung
ohnehin nur noch 4,75 V - 5,25 V. Spannungsmessungen direkt am Motor haben ergeben, dass die ·
Spannung bei Batteriebetrieb UM, Batt = 5,74 V beträgt, und dass die ·
Spannung bei „USB 2.0“-Betrieb UM, USB = 2,38 V beträgt. In der Praxis hat sich dies auch auf die Weise
bestätigt, dass der Motor bei Batteriebetrieb mit UM, Batt = 5,74 V praktisch doppelt so
schnell lief als bei dem „USB 2.0“-Betrieb mit UM, USB = 2,38 V. Demzufolge müsste
man dies bei der Programmierung
des Proxi-Roboters entsprechend
berücksichtigen und auch dem Anwender
über das LED-Display mitteilen für
welchen Betriebsmodus (Batterie
oder USB 2.0) das entsprechende Programm
programmiert wurde! Im Umkehrschluss bedeutet dies, dass man
anhand der jeweiligen Drehzahl
n mit
n = Anzahl Umdrehungen / Minute
herausfinden und berechnen kann, ob der Proxi-Roboter
mit Batterien oder mittels „USB 2.0“-Spannungsversorgung betrieben wird. Wenn
man dabei auch noch über einen Referenzspannungswert
URef
als Bezugsspannung (= Soll-Wert)
verfügt, dann ließe aus der Änderung der Umdrehungszahl n direkt die zum
Betrieb des Motors erforderliche Spannung UM, Batt oder UM, USB berechnen! - Bezüglich des Proxi-Roboters verhält es sich derzeit so, dass wir die am Antriebsmotors P13 anliegende Spannung von UM, Batt = 5,74 V bzw. UM, USB = 2,38 V nicht mit dem „micro:bit“-Rechner anhand eines analogen
Spannungseingangs nebst Analog-/Digitalwandlung
(A/D-Wandler) erfassen und auswerten können. Deshalb kommen wir an dieser
Stelle nicht weiter. Was sich an dieser aber noch zeigen lässt,
ist, wie man eine analoge Spannung am Eingang eines
analogen Ports einliest, in einen
digitalen Bitwert mittels des
integrierten A/D-Wandlers des „micro:bit“-Rechners umwandelt und diesen
in die analoge Spannung einer „USB 2.0“-Spannungsversorgung umrechnet. Bei dem „micro:bit“-Rechner gibt es am unteren
Rand eine Leiste mit 5
großen Rundlöchern
, engl. „Edge Connector“, in die sich sogenannte Bananenstecker
mit Verbindungskabeln einstecken lassen. Bei der großen Rundbuchse „3V“ handelt es sich um
einen besonderen Anschluss, engl. „port“ genannt. Demzufolge
handelt es sich bei dem Port mit
dem Pin „3V“ um eine interne, stabilisierte Spannungsquelle mit UPin 3V = 3,3 V, deren stabilisierte Spannung sich sehr gut als Referenzspannung
nutzen lässt.
(Vergrößern: auf das
Bild klicken! | Quelle: BBC
micro:bit Hardware) Bei dem Projekt
„proxi-roboter, p-08“ erfassen wir erstmalig die Umgebungshelligkeit des „micro:bit“-Rechners, die als dezimaler
Binärwert in der Systemvariablen <Lichtstärke> gespeichert wird. Leuchtdioden (LEDs), engl. „Light Emitting Diodes“, d.h. Licht emittierende Halbleiterdioden bestehen
aus einer p- und n-leitenden Halbleiterschicht,
die an der Sperrschicht einen PN-Übergang ausbilden.
Dabei werden Leuchtdioden
(LEDs)
stets in Durchlassrichtung
betrieben, sodass sich die Sperrschicht am PN-Übergang räumlich verkleinert
und der Durchlassstrom IF mittels eines
entsprechenden Vorwiderstandes
RVor = 100 … 240 Ω entsprechend begrenzt werden muss,
damit die LED keinen Schaden nimmt
und durchschmort! Betreibt man eine LED
hingegen in Sperrrichtung,
dann vergrößert sich am PN-Übergang die Sperrschicht und mit ihr auch der Sperrschichtwiderstand RSperr. Durch die Beleuchtung
der Sperrschicht am PN-Übergang sorgen die eintreffenden,
elektrisch geladenen Photonen dafür, dass die Ladungsmenge Q und mit ihr auch die Sperrspannung USperr und elektrische Feldstärke E in der Sperrschicht ansteigen, sodass
sich auch die in der Sperrschicht gespeicherte
elektrische Energie Wel im Mittel vermeintlich
vergrößert: Wel = ½ USperr * Q
= ½ USperr * ISperr * t
" Für die Sperrschichtkapazität folgt mit CSperr = Q / USperr = 2 Q / 2 USperr = … = n Q / n USperr = konstant! Das bedeutet, dass die Sperrschichtkapazität CSperr trotz Zunahme der Ladungsmenge Q an Photonen wegen der ebenfalls
zunehmenden Sperrspannung
USperr
konstant bleibt! E = USperr / dSperr
" Sperrschichtlänge
dSperr = USperr / E = 2 * USperr / 2 * E = … = n * USperr / n * E = konstant! Jetzt wissen wir wegen dSperr = konstant, dass der eintreffende Photonenstrom wegen der konstanten Ausdehnung
der Sperrschicht zwangsweise zu einer Zunahme der elektrischen Feldstärke E an der Sperrschicht führt, sodass als
Folge dessen größere elektrische Kräfte
auf die Ladungsträger wirken, die
früher oder später zu einem Spannungsüberschlag im Sinne einer
zwangsweisen Entladung und Zerstörung der Sperrschicht beim PN-Übergang führt! Das Besondere ist aber, dass es zu keinem
Spannungsüberschlag kommt, kommen kann,
weil der äußere Druck der elektrischen Feldstärke
E auf die Ladungsträger in der
Sperrschicht dazu führt, dass sich
der Sperrstrom ISperr in der Sperrschicht maßgeblich vergrößert
und zu einem Ladungsträgerabfluss im PN-Übergang führt. Dabei entspricht
der Ladungsträgerabfluss in Form des vergrößerten
Sperrstroms ISperr direkt dem Photonenstrom bzw. der Umgebungshelligkeit, die sich ja
rechnerisch mittels des Statements
auswerten, d.h. in einen dezimalen Bitwert und in einem weiteren
Programmierschritt in eine adäquate Spannung umrechnen lässt!
Die nachfolgende Abbildung zeigt eine
elektronische Schaltung mit zwei NPN-Transistoren,
die als Darlington
zusammengeschaltet sind und somit über eine Stromverstärkung B = B1 * B2 im Bereich von B = [
20 000 bis 50 000 ] verfügen, so dass sich der sehr kleine Sperrstrom IB Sperr, grün ≈ 1
µA (=
1 Millionstel Ampere) auf bis zu IC,
Mittel = 35 000 µA = 35 * 103 µA =
35 * 103 * 10-6 A = 35 * 10-3 A = 35 mA (= Mittelwert) verstärken lässt. In der Schaltung selbst berechnet sich aber
der Kollektorstrom IC T1,T2 durch den Vorwiderstand RVor = 1 kΩ zum Schutz der roten LED wie folgt: IC T1,T2 = ( UBatt – ULED – UCE, satt ) / RVor " Sättigungsspannung UCE, satt = 0,4 V = ( 9 V – 1,6 V – 0,4 V ) / 1 kΩ
= 7 V / 1 kΩ = 7 mA " Stromstärke durch die rote LED >> Standard-Leuchtdioden haben einen
Durchmesser von 5 mm. Sie sind die häufigsten verwendeten Leuchtdioden in
elektronischen Schaltungen. Sie beginnen bei 8 bis 12 mA zu leuchten. Erhöht
man den Strom leuchten Sie heller. Bei 20 mA ist die maximale Leuchtkraft
erreicht. Der Unterschied zu 15 mA ist aber nur minimal. Meist ist ein Strom
von 10 mA schon ausreichend, um sie ausreichend zum Leuchten zu bringen. <
(Quelle: Elektronik-Kompendium) Wenn man möchte, dass die rote LED mit IF = 15 mA richtig hell leuchtet, dann müsste man den Vorwiderstand von
derzeit RVor = 1 kΩ entsprechend der
nachfolgenden Berechnung auf RVor
= 470 Ω
verkleinern: RVor =
( UBatt – ULED – UCE,
satt ) / IC T1,T2 " IC T1,T2 = IF = ( UBatt – ULED – UCE,
satt ) / IF = ( 9 V - 1,6 V – 0,4
V ) / 15 mA = 7 V / 15 mA = 0,467 kΩ ≈
470 Ω
(Zum Vergrößern bitte
auf das Bild klicken!) Wie man in der obenstehenden Schaltung sieht,
wird die grüne LED in Sperrrichtung betrieben, sodass diese als lichtempfindliche
Leuchtdiode arbeitet. Dabei
entspricht der Sperrstrom durch die grüne LED gleich dem Basisstrom IB T1 durch die beiden Basis-Emitter-Dioden in Reihe von zusammen UBE = 2 * 0,7 V = 1,4 V: ULED, Sperr = UBatt - UR 100k - UBE = UBatt – ( IR 100k * R100k ) - UBE " IR 100k = ISperr, LED = 1 µA (entsprechend der bisherigen Annahme!) = 9 V -
( 1 µA * 100 kΩ ) -
1,4 V = 9 V
- ( 100
mV ) - 1,4 V = 9 V - 0,1 V - 1,4 V = 7,5 V RSperr, LED = ULED, Sperr / ISperr, LED = 7,5
V / 1 µA = 7,5 MΩ " Widerstand RSperr, LED der grünen LED in Sperrrichtungg! Berechnung der Stromverstärkung B der Darlington-Schaltung:
B = IC / IB = IC
T1,T2 / ISperr, LED = 15 mA / 1 µA = 15 * 10-3
Jetzt wo wir wissen, dass sich eine herkömmliche
Leuchtdiode (LED) auch als Fotodiode verwenden
lässt, sofern sie in Sperrrichtung
betrieben wird, kann man sich jetzt auch vorstellen, dass sich die 5 x 5 Matrix des LED-Displays des „micro:bit“-Rechners zusammen mit 5 x 5 = 25 Einzeldioden quasi als einzelne Fotodiode betreiben lässt. Dabei lässt sich die Umgebungshelligkeit mittels der 5 x 5 Matrix des LED-Displays als Fotodiode
erfassen und der Variablen <Lichtstärke> wie folgt zuweisen:
Wenn man bei dem nachfolgenden Projekt „proxi-roboter, p-08“ nach dem Programmstart
den <Knopf A> drückt, dann wird
mittels des 5 x 5 Matrix des LED-Displays als Fotodiode die Umgebungshelligkeit
erfasst, als dezimaler Bitwert
der Variablen <Lichtstärke> zugewiesen und der
entsprechende Bitwert als
Laufschrift auf dem LED-Display angezeigt:
(Zum Vergrößern bitte
auf das Bild klicken!) Wenn man dann bei dem obenstehenden Projekt „proxi-roboter, p-08“ als Nächstes den <Knopf B> drückt, dann wird der Bitwert der Variablen <Lichtstärke> in eine analoge
Spannung umgerechnet, die
wiederum der Variablen <Lichtstaerke> zugewiesen wird,
sodass der vormals gespeicherte Bitwert
überschrieben wird! Der Wert der umgerechneten analogen Spannung wird dann als Laufschrift auf dem LED-Display angezeigt. Demzufolge wird beispielsweise der Bitwert = 200 Bit in die analoge
Spannung 1023 Bit
" 3,3 V 200
Bit " x
V _______________ x = 3,3 V / 1023 umgerechnet!
Wenn wir also tatsächlich den Bereich der maximal
möglichen Spannung von 3,3 V ausnutzen wollen, dann müssen wir den maximal
möglichen Bitwert 255 der Lichtstärke auf bis zu 1023
skalieren, d.h. hochrechnen: 1023 Bit
" 3,3 V 255
Bit " x
V _______________ x = 3,3 V / 1023 255
Bit " 0,823 V 1023 Bit
" x
V _________________ x = 0,823 V / 255 Demzufolge beträgt der Skalierungsfaktor 3,3 V / 0,823 V = 4 fach analog! Wenn man die Spannung von 0,65 V der gemessenen Lichtstärke mit dem Skalierungsfaktor 4 wie folgt hochrechnet, ULicht = 0,65 V * 4 = 2,6 V dann folgt für die skalierten Bitwerte: 3,3 V " 1023 Bit 2,6 V " x
Bit _______________ x = 1023 Bit / 3,3
Werfen wir bei dieser Gelegenheit noch kurz
einen Blick auf den zeitabhängigen Prozess der Analog-zu-Digital-Wandlung
beim A/D-Wandler. Dazu muss man wissen, dass der A/D-Wandler über einen Abtastbereich der analogen Spannung (= grauer Kurvenverlauf) im Bereich von [ 0, …, 1023 ] mit 1024 verschiedenen
Abstufungen verfügt:
(Vergrößern: auf das
Bild klicken! | Quelle: Wikipedia) Ferner sollte man wissen, dass es auch höher
auflösende A/D-Wandler mit z.B.
einem Abtastbereich der analogen Spannung (= grauer Kurvenverlauf) im Bereich von [ 0, …, 4095 ] mit 4096 verschiedenen
Abstufungen gibt, die z.B. bei Multimetern oder Oszilloskopen eingesetzt
werden und dementsprechend auch mehr kosten! Abschließend sei noch kurz die Funktionsweise
des Projekts „proxi-roboter,
p-08“ erläutert. Wenn man
nach dem Programmstart, d.h. nach dem Hochfahren des „micro:bit“-Rechners und der Anzeige des Häkchens „P“ in der Laufschrift auf den <Knopf A> drückt, dann wird
mittels des 5 x 5 Matrix des LED-Displays, das kurz als Fotodiode arbeitet, die Umgebungshelligkeit
erfasst, als dezimaler Bitwert
der Variablen <Lichtstärke> zugewiesen und der
entsprechende Bitwert als
Laufschrift auf dem LED-Display angezeigt. Wenn sich also im Laufe des Tages fortwährend
die Umgebungshelligkeit verändert
und man auf diese Änderungen
laufend reagieren möchte, dann muss man dementsprechend oft auf den <Knopf A> drücken, da nur
dieser Programmblock den Bitwert der Variablen <Lichtstärke> abruft:
Wenn man sich darüber hinaus den zuvor mittels
<Knopf A> eingelesenen Bitwert der Variablen <Lichtstärke> auch als elektrische
Spannung mittels der Variablen <Lichtstaerke_Spannung> anzeigen lassen möchte, weil diese für
den ambitionierten Anwender und angehenden Elektrotechniker wesentlich
aussagekräftiger ist, dann muss man den <Knopf B> je nach Erfordernis entsprechend oft drücken,
weil nur dessen Programmblock den Bitwert der Variablen <Lichtstärke> in die analoge
Spannung der Variablen <Lichtstaerke_Spannung> umrechnet:
Das
Arbeiten mit Funktionen Wenn es in der Physik, der Elektrizitätslehre
als Teilgebiet der Physik oder in der Elektrotechnik in
einem Stromkreis einen
rechnerischen bzw. mathematischen Zusammenhang zwischen Spannung
U und Strom I gibt,
nämlich den, dass der Strom I umso größer wird, je
größer die Spannung U ist, dann spricht man
von der Proportionalität
zweier Größen. Wenn sich also der Strom I
proportional (~) zur Spannung U verhält, dann gilt: I ~ U. Wenn darüber hinaus die doppelt so große
Spannung 2 * U = 2 U auch einen doppelt
so großen Strom 2 * I
= 2 I
zur Folge hat, dann folgt: 2 * I ~ 2 * U " I ~ U Die Proportionalität
2 * I ~ 2 * U
verfügt also auf beiden Seiten des Proportionalitätszeichens ~ über ein- und
denselben (Multiplikations-)
Faktor = 2,
sodass sich mit diesem aus der Proportionalität
immer ·
die Proportionalität
Faktor n * I = Faktor n * U ableiten lässt. Wenn darüber hinaus der Quotient n * I / n * U = I /
U mit I / U = k und k
als Konstante stets konstant
ist, dann handelt es sich bei der Konstanten
k gemäß dem Ohmsches Gesetz um den sogenannten ·
elektrischen Leitwert G
mit k = I / U bzw. G
= I /
U Mit dem Kehrwert
von k ergibt sich dann
wiederum der ·
elektrische Widerstand
R mit
1 / k = 1 / G und R = U / I
So, nun wissen wir nicht nur was eine mathematische
Funktion ist, sondern haben ganz
nebenbei auch noch das Ohmsche
Gesetz
kennengelernt! Bei der Programmierung
von höheren
Programmiersprachen wie z.B. JavaScript, PHP, C, C# von Microsoft,
Java von Sun Microsystems jetzt Oracle oder Python gibt es auch Funktionen,
die aber keine mathematischen Funktionen sind, aber trotzdem
mathematische Funktionen im Sinne von Gleichungen in der Programmierung
enthalten können. Was also sind programmiertechnisch Funktionen? Umgangssprachlich könnte man sagen, dass alles
was funktioniert, eine oder mehrere Funktionen enthält. Dabei bezieht sich
das Funktionieren von Geräten und Maschinen hauptsächlich auf die dazu
verwendete Technik. Eine Kaffeemaschine
funktioniert, wenn sie nicht nur heißes Wasser produziert, sondern damit auch
zur richtigen Zeit, nämlich nach dem Einschalten, das Kaffeepulver aufbrüht.
Wenn eine Kaffeemaschine nach geraumer Zeit stark verkalkt ist, funktioniert
sie nicht mehr oder nur noch eingeschränkt, sodass das Kaffeeaufbrühen immer
länger dauert, weil der Boiler wegen
der Verkalkung nicht mehr genügend heißes Wasser liefert und stattdessen mehr
Wasserdampf als Heißwasser produziert. Lässt sich eine Kaffeemaschine programmieren?
Ja! So gibt es z.B. Kaffeemaschinen mit einer eingebauten Zeitschaltuhr,
sodass man sich Sonntagmorgen um 10 Uhr vom Kaffeeduft wecken lassen kann.
Auch ließen sich die Stromaufnahme und die Brühzeit mittels Sensoren erfassen
und mittels Mikroprozessorprogramm auswerten. Wenn dann z.B. die Zeitdauer
der Stromaufnahme und Brühzeit im Laufe der Zeit immer länger wird, dann kann
man davon ausgehen, dass die Kaffeemaschine wegen zunehmender Verkalkung
immer weniger wie erwartet funktioniert. Das Auswerten der Brühzeit wiederum würde aber
nur dann richtig funktionieren, wenn man dabei auch die eingefüllte
Wassermenge für z.B. vier Tassen Kaffee mittels einer Füllstandsanzeige erfassen
würde und der Anwender nach dem Einschalten der Kaffeemaschine dieser
mitteilt, wie viele Tassen Kaffee aufgebrüht werden sollen. Nur dann ließe
sich nämlich eine Kennlinie erstellen, hinsichtlich der Brühzeit auswerten
und ein entsprechender Alarm zum Entkalken der Maschine auslösen.
Bei den beiden Projekten „proxi-roboter, p-08“ und „proxi-roboter, p-09“ gibt es noch einen „Schönheitsfehler“ im Programmkode, den es zu beheben gilt.
Und zwar benutzen wir im ·
Programmblock <dauerhaft> ·
Funktionen <berechne_Bitwert_Lichtsensor> und <berechne_Spannung_Lichtsensor> die Variable
<Lichtstärke> ohne diese zuvor
deklariert und initialisiert zu haben. Als Variable
bezeichnet man in der Mathematik
einen rechnerisch oder zeitlich jederzeit veränderlichen Wert. Dabei
dient die Variable als Platzhalter,
bildlich gesprochen als Schublade, in die man aus verschiedenen Anlässen und
zu unterschiedlichen Zeiten z.B. mal mehr, mal weniger Schokolade aufbewahrt.
Dabei ist dann die Schokolade der Inhalt, der mathematische Wert und die
Schublade die dazugehörige Variable. Wenn die Schublade aus Holz ist, dann sieht
man ihr nicht an, was sich in ihr befindet, ob sich wirklich Schokolade in
der Schublade befindet oder nicht, weil sie zwischenzeitlich heimlich
aufgegessen wurde. Wäre die Schublade aus Glas oder
durchsichtigem Kunststoff, dann könnte man schon von außen sehen, ob sich wirklich
Schokolade in der Schublade befindet oder nicht. Eine Kommode hat oftmals drei oder vier
Schubladen, die von außen alle gleich aussehen, wenn sie einheitlich weiß
lackiert sind, sodass man diese ohne abzuzählen nicht auseinanderhalten
könnte, weil sie eben alle gleich aussehen. Würden wir die Schubladen mit n = 0, n = 1, n
= 2 numerieren, d.h. indexieren, dann könnte man die gleich
aussehenden Schubladen ganz einfach anhand des jeweiligen Index problemlos auseinanderhalten.
Dabei beginnt die Indexierung bei
n = 0, weil der Computer nur zwei Finger zum Zählen hat, nämlich „0“ = „Strom aus“ (= logisch „false“) und „1“ = „Strom ein“ (= logisch „true“).
Was aber passiert bzw. was macht man, wenn die
Schublade n = 2 - also die dritte
Schublade - voll ist und fast schon
überquillt? Ganz einfach! Man sucht sich eine leere Schublade n = 0
und tut dort die neuen Schokoladentafeln hinein: 1.
Schublade(0) =
neue_Schokoladen " Die Schublade(0) wird ausschließlich
mit neuer Schokoladen gefüllt! 2.
Schublade(0) =
Schublade(0) + neue_Schokoladen " Die Schublade(0) wird mit weiterer
Schokolade aufgefüllt! Oder, wenn in der neuen Schublade(0) mehr Platz für
Schokolade ist als in der alten Schublade(2),
dann folgt: 3.
Schublade(0) =
Schublade(2) + neue_Schokoladen " Jetzt wissen wir, dass sich einer Variablen jederzeit neue Inhalte, neue
Werte zuweisen lassen (siehe 1.)! Außerdem wissen wir, dass sich einer Variablen, die bereits Inhalte, Werte enthält, weitere
neue Inhalte, neue Werte hinzufügen lassen (siehe 2.). Ferner wissen
wir, dass sich einer Variablen Variableninhalte,
Variablenwerte einer anderen Variablen zuweisen und zusätzlich auch noch weitere
neue Inhalte, Werte hinzufügen lassen (siehe 3.).
Aber auch wenn eine Schublade (= Variable) noch keine Schokolade
im Sinne von Inhalten oder Werten enthält, kann man die Schublade zuvor darauf festlegen,
dafür bestimmen, dass sie nur Schokolade
aufnehmen darf und nichts anderes!
Bei den
beiden Projekten „proxi-roboter, p-08“ und „proxi-roboter, p-09“ besteht der „Schönheitsfehler“ im Programmkode darin, dass zwar die Variable <Lichtstärke> in beiden Programmen
angesprochen und benutzt
wird, ohne diese zuvor im Hauptprogramm
initialisiert zu haben! Wenn man demzufolge die Variable <Lichtstärke> in der Funktion <berechne_Bitwert_Lichtsensor> des Projekts „proxi-roboter, p-09“ das erste Mal benutzt,
um dieser den dezimalen
Bitwert zuzuweisen, dann gelingt
das nur deswegen, weil die Variable <Lichtstärke>
bereits zuvor beim Kompilieren mit Lichtstärke = 0 als dezimalem
Bitwert initialisiert
wurde! Bevor also der Compiler den Quellkode, engl. „source code“, des Projekts
„proxi-roboter, p-09“ in Maschinenkode
des „ARM Cortex M0“-Prozessors
des „micro:bit“-Rechners
übersetzt, schaut dieser u.a. zuvor nach, ob und welche Variablen es im Programm gibt und initialisiert
diese vorsorglich. Dabei werden automatisch Rechen-Variablen mit
dem Wert = 0 und Text-Variablen mit dem leeren Textstring „“, d.h. mit null Zeichen bzw. mit der Textstringlänge
= 0 initialisiert, damit es später beim Programmstart und der
Programmausführung wider Erwarten keine Probleme im Sinne eines sogenannten „Laufzeitfehlers“
gibt! Dass dem wirklich so ist,
lässt sich auch beweisen! Nämlich indem man sich in einem der beiden Projekte „proxi-roboter, p-08“ oder „proxi-roboter, p-09“ direkt nach dem Programmstart
den umgerechneten Wert der Variablen
<Lichtstaerke_Spannung>
durch Drücken von <Knopf
B> im LED-Display
anzeigen lässt:
Wie man im obenstehenden Programmblock [ wenn <
Knopf B ist geklickt >, dann ] sieht, lässt sich das Statement
mit der Division 3,3 / 255
problemlos berechnen und das Ergebnis der Variablen <Lichtstaerke_Spannung>
zuweisen. Bei dem nachfolgenden Statement
sieht es wegen der Multiplikation schon etwas anders
aus, weil die Variable <Lichtstaerke_Bits> den Bitwert = 0 hat und das Rechenwerk des „micro:bit“-Rechners die mathematische Regel „Eine Zahl mit Null multipliziert ergibt Null!“
beherrschen muss:
(Zum Vergrößern bitte
auf das Bild klicken!) Wir verändern den Quellkode im obenstehenden Projekt,
indem wir in der Funktion <berechne_Bitwert_Lichtsensor> das Statement
einfach entfernen,
sodass die Variable <Lichtstaerke_Bits> nicht mehr mit
dem Wert der Variablen <Lichtstärke> initialisiert wird! Wir speichern die Änderung des Quellkodes im
neuen Projekt „proxi-roboter,
p-10“ ab,
(Zum Vergrößern bitte
auf das Bild klicken!) starten das Programm und betätigen nach dem Programmstart den <Knopf A>, um zu sehen, welcher
Bitwert in der Laufschrift „Lichtstaerke = ? Bits“ angezeigt wird. Obwohl beim Funktionsaufruf der Funktion
<berechne_Bitwert_Lichtsensor> der Bitwert der Variablen <Lichtstärke> für die
Umgebungshelligkeit „mit auf den Weg gegeben“, d.h. eingelesen wird, sodass
dieser innerhalb der Funktion
zur Verfügung steht,
wird mit dem Bitwert der Variablen <Lichtstärke> nicht
gearbeitet, d.h. nicht der Variablen
<Lichtstaerke_Bits> zugewiesen, da wir
das Statement
aus dem Programmkode
entfernt haben! Deshalb
lässt sich in der Funktion <berechne_Bitwert_Lichtsensor> mittels der Variablen
<Lichtstaerke_Bits> nur der Bitwert = 0 in der Laufschrift
anzeigen!
- Werfen wir einen Blick auf das nächste Projekt „proxi-roboter, p-11“ mit dem interessanten Statement
das es zu klären und erklären gilt:
(Zum Vergrößern bitte
auf das Bild klicken!) Wie man sieht, ist das neue Statement
nicht nur farblich grau hinterlegt, sondern
auch auf englisch, also nicht ins Deutsche übersetzt, was darauf hin deutet,
dass sich dieses Statement nicht
in der eingedeutschten Befehlsbibliothek
befindet, sich demzufolge dort auch nicht anklicken und in das Programm übernehmen lässt! So wie es aussieht, geht es bei dem Statement um die Variable <Lichtstaerke_Bits>, die vom Typ engl. „number“,
d.h. numerisch ist. Dabei bedeutet „number“ übersetzt „Anzahl, Nummer, Zahl, Ziffer“. Mathematisch gehören zu „number“ natürliche (positive) Zahlen, ganze (positive
und negative) Zahlen, aber auch (positive oder negative) Dezimalzahlen, umgangssprachlich
Kommazahlen genannt.
Jetzt bleibt nur noch zu klären, welcher Bitwert der Variablen <Lichtstaerke_Bits> beim Bestätigen von <Knopf A> in der Laufschrift
auf dem LED-Display angezeigt wird. Und zwar im unbeleuchteten Zustand des 5 x 5 Matrix großen LED-Diesplays. Ich weiß es zwar, aber ich verrate es
nicht. Mein Tipp: das Projekt „proxi-roboter,
p-11“ starten und dann <Knopf A> drücken! - Weiter geht’s mit dem Projekt „proxi-roboter, p-12“ bei dem zwar die Variablen <Lichtstaerke_Bits>
deklariert, aber eben nicht deklariert
wird, weil das Statement
weggelassen wurde:
(Zum Vergrößern bitte
auf das Bild klicken!) Was bedeutet die Anzeige „NaN“ in der LED-Laufschrift, wenn man das Projekt „proxi-roboter, p-12“ startet und nach dem Hochfahren des „micro:bit“-Rechners Hier noch ein Tipp dazu: Positioniere den Mauszeiger im „MakeCode“-Programm von Microsoft (= „Blöcke“) auf das Statement
Bewege den Mauszeiger auf dem Statement
langsam hin und her bis dieser zu einer kleinen, weißen Hand verändert und warte
einen kleinen Moment, bis die kleine Kontext-Anzeige
erscheint!
Werfen wir bei dieser Gelegenheit einen Blick
auf den „JavaScript“-Quellkode:
(Zum Vergrößern bitte auf
das Bild klicken!) So, jetzt ist es raus! Ich habe bei der Programmierung geschummelt und dem „MakeCode“-Programm, d.h. dem
Programmieren in Blöcken heimlich das „JavaScript“-Statement
untergeschoben, um den Unterschied zwischen
dem Deklarieren und Initialisierung
besser verdeutlichen zu können. Diesbezüglich könnte man auch sagen, dass das
Initialisieren einer Variablen das Deklarieren einschließt bzw. vorwegnimmt.
Funktionen
mit Eingang und Ausgang Bisher benutzen wir Funktionen hauptsächlich dazu, bestimmte, sich teils
wiederholende Dinge, insbesondere Programmkode in diese auszulagern,
um dementsprechend die Lesbarkeit und Übersichtlichkeit des Programms zu verbessern.
Funktionen dienen aber nicht nur dazu, funktionelle Programmteile zusammenzufassen
und in eine Funktion auszulagern, sondern
können auch die in der Funktion berechneten Ergebniswerte wieder an das Hauptprogramm
<beim Start> oder an die nächste
Funktion zurückgeben:
(Zum Vergrößern bitte
auf das Bild klicken!) Beim nächsten Projekt „proxi-roboter, p-14“ wird mit dem Statement
die Variable
<schalte_Ein_Aus> auf den logischen
Wert = 0 gesetzt (siehe im Hauptprogramm <beim
Start>),
um auf diese Weise den booleschen, d.h. logischen „Ein-/Aus-“-Schalter auf den Anfangswert
„Aus“ (= 0) zu setzen. Dabei ist es wichtig, den booleschen, d.h.
logischen „Ein-/Aus-“-Schalter von Anfang an
auf einen definierten Zustand
(= „Aus“) zu setzen, damit es später beim Umschalten (siehe blauer Kasten) zu keinen Missverständnissen kommt, weil man nicht
weiß, ob der boolesche „Ein-/Aus-“-Schalter aktuell ein- oder
ausgeschaltet ist! Die Umgangssprache verfügt im Gegensatz zur
Hochsprache nur über einen begrenzten Wortschatz, was aber nicht zwangsweise
ein Nachteil sein muss. Schließlich hilft uns die Umgangssprache dabei, Dinge
schneller zu verstehen und zu begreifen. Wenn also die Umgangssprache von
einem Schalter
spricht, dann denkt der Technik affine Mensch sofort an einen Lichtschalter in
der Wohnung, im Wohnungsflur, im Hausflur oder Treppenhaus. Doch seit der Erfindung des Transistors
Anfang der 50er Jahre müsste die Umgangssprache auch von einem Taster bzw. Tastschalter sprechen. Bei einem längeren Hausflur liegen die
Lichtschalter logischerweise ziemlich weit auseinander. Mit dem Vorteil, dass
ich das Flurlicht mit dem Lichtschalter A einschalten und am anderen Ende des
Flures mit dem Lichtschalter B wieder ausschalten kann. Der Strippenzieher, d.h. der
Elektroinstallateur, nennt eine solche Schaltung, die aus zwei Schaltern A
und B besteht, Wechselschaltung.
Dabei schaltet der Lichtschalter A
die Stromzufuhr „auf dem Hinweg“ vom Außenleiter
bzw. Stromleiter L (= Phase) über die Glühlampe hin zum Neutralleiter N (= geeignet niederohmig geerdet) ein und der Lichtschalter B „auf dem Rückweg“ zum
Stromleiter L (= Phase) wieder aus. Wenn aber
die Glühlampe „auf dem Rückweg“ ausgeschaltet wird,
dann kann es sein, dass sie, obwohl ausgeschaltet, auf der spannungsführenden
Seite, d.h. dem Stromleiter L (= Phase) liegt! Achtung: Gefahr eines Stromschlags! Deshalb
müssen Wechselschaltungen bei
Wartungs- oder Reparaturarbeiten stets am Sicherungskasten durch Ausschalten
der Sicherung stromlos gemacht werden! Wenn in einem längeren Wohnungs- oder Hausflur
mehr als zwei Lichtschalter verbaut sind, dann
handelt es sich bei diesen in Wirklichkeit um Taster
zum Ein- oder Ausschalten der Beleuchtung. Was aber ist der Unterschied zwischen einem Lichtschalter und einem Lichttaster? Während ein Lichtschalter tatsächlich die Stromzufuhr zur Glühlampe ein- oder ausschaltet, gibt man über den Lichttaster nur den Befehl dazu, die Stromzufuhr zur Glühlampe ein- oder auszuschalten! Ob der Befehl zum Ein- oder Ausschalten dann tatsächlich
ausgeführt, d.h. umgesetzt wird, erkennt man dann nur an der Glühlampe
selbst, wenn diese an- oder ausgeht! Demzufolge erfolgt das Ein- und Ausschalten über ein
entsprechendes Relais im Sicherungskasten!
Der „micro:bit“-Rechner verfügt übrigens über
drei Taster und zwar auf der Vorderseite die beiden Taster A und B
und an der Rückseite den „Reset“-Taster, der sich neben der „Micro USB 2.0“-Anschlussbuchse befindet. Dabei dient
der „Reset“-Taster dazu, den „micro:bit“-Rechner neu zu starten, wobei
dann auch das im Arbeitsspeicher nichtflüchtig
gespeicherte Programm automatisch
gestartet und ausgeführt wird. Die beiden Taster A
und B auf der Vorderseite des „micro:bit“-Rechners lassen sich programmieren.
Beim Programmieren mit „MakeCode“ (= Blöcke) heißen die
beiden Taster „Knopf A“ und „Knopf B“, so die Übersetzung. Beim nachfolgenden Projekt „proxi-roboter, p-14“ kann man im Programmblock „dauerhaft“ im blauen
Kasten
sehr gut sehen, dass man mit dem <Knopf B> lediglich den logischen
Schalter, d.h. die Variable <schalte_Ein_Aus> von logisch
„0“ (= engl. „false“, unwahr, unzutreffend, aus) auf logisch
„1“ (= engl. „true“, wahr, zutreffend, ein) und umgekehrt umschaltet! Dabei verhält es sich so, dass der Umschaltvorgang mittels Drücken des Tasters „Knopf B“ zunächst ohne Folgen, ohne Reaktion bleibt,
da das eigentliche Umschalten separat
veranlasst und demzufolge mittels Statement
im roten
Kasten
programmiert werden muss:
(Zum Vergrößern bitte
auf das Bild klicken!) Wie man im obenstehenden Bild des Projektes „proxi-roboter, p-14“ sieht, gibt die Funktion <berechne_Spannung_Lichtsensor> zwar die berechnete
Spannung in Form der Variablen <Lichtstaerke_Spannung> wieder an das Hauptprogramm <beim
Start>
sowie an das Programm <dauerhaft> zurück,
ohne aber später beim Programmblock <zeichne
Säulendiagramm>
wieder auf diese zurückzugreifen:
(Zum Vergrößern bitte
auf das Bild klicken!) Wir nehmen den zuvor beschriebenen
„Schönheitsfehler“ zum Anlass, um diesen zu beheben und verlagern dabei
gleichzeitig den Programmblock <zeichne Säulendiagramm> in die Funktion <berechne_Spannung_Lichtsensor>
und passen bei dieser Gelegenheit das Säulendiagramm an die umgerechnete Spannung als Funktion der Lichtstärke an, indem wir den vormaligen Bitwert 255 auf nunmehr 3,3 V abändern,
sodass sich jetzt das Säulendiagramm auf die maximale
Spannung USäule = 3,3 V bezieht! Dabei ändert
sich aber nichts an der grafischen Darstellung (siehe Projekt „proxi-roboter, p-15“
(Zum Vergrößern bitte
auf das Bild klicken!) Vom Klickzähler
zum Rundenzähler Mit dem Projekt
„proxi-roboter, p-07“ (siehe weiter oben) brachten wir den Proxi-Roboter dazu, dass er mit dem Motor
P13, dem Untersetzungsgetriebe und
der Hub- und Schubstange B2 genau einen Zahnradumlauf (= 360 Grad) in der Zeit
von tEinzel = 1210 ms (= Millisekunden) = 1,210 s ( = Sekunden) durchführte. Da sich die tatsächliche Umlaufzeit u.a. wegen
der Reaktionszeit der Zeitnehmerperson nicht absolut exakt stoppen lässt,
greifen wir zu einem Trick und lassen den Motor P13 mit den beiden
gleichlaufenden Zahnrädern und der Hub- und Schubstange B2 insgesamt eine
Minute lang laufen und zählen dabei die Drehzahl, d.h. Anzahl der Umläufe wie
folgt: Zeitdauer T = 1 min = 60 s insgesamt tEinzel = 1,210 s Drehzahl n = Umdrehungen " dimensionslos, d.h. ohne
Maßeinheit! Berechnung
der Drehzahl n pro Minute: n = T / tEinzel = 1 min / 1,210 s = 60 Da es bei der Drehzahl n um ganzzahlige Umdrehungen geht, also um n = 50 Umdrehungen, rechnen wir wie
folgt „rückwärts“, um die Rundenzeit tEinzel einer einzelnen
Umdrehung wie folgt zu berechnen: tEinzel = T / n = 1 min / 50 = 60 s / 50 = 1,20 s = 1200 ms Jetzt wo wir die Rundenzeit tEinzel kennen, lässt sich diese entsprechend
dem Vollkreis = 3600
wie folgt aufteilen: tEinzel / 3600 = 1200 ms / 3600
= 3,333 ms/10 = 19,998 ms/60 ≈ 20 ms/60
Das nachfolgende Projekt „proxi-roboter, p-16“ dient dazu, die Drehung der schwarzen Zahnräder
B9 (links) und A6 (rechts)
nebst der Auf- und Abbewegung der senkrechten Zug- und Druckstange bezüglich der Rotation der beiden Zähnräder zu erfassen
(Zum Vergrößern bitte
auf das Bild klicken!) mit dem Ziel, den Bewegungsapparat und dessen Drehung
nach links und rechts zu steuern, um diesen beim späteren
Zusammenbau in eine vorteilhafte Montageposition zu bringen, sodass sich später der Dreh- und Bewegungsmechanismus der 2 x 3 Krabbenbeine leichter montieren
lässt. Das Projekt
„proxi-roboter, p-16“ bzw. das dazugehörige, kompilierte und
ausführbare Programm „microbit-proxi-roboter-p-16.hex“ besteht dabei aus drei Programmblöcken: 1.
dem Programmblock <beim
Start>,
bei dem die beiden Variablen <schalte_Ein_Aus> = 0 und <lauf_vorwärts> = 1 initialisiert werden. Demzufolge ist der Antriebsmotor P13 beim Einschalten
und Hochfahren des Proxi-Roboters ausgeschaltet,
wohingegen die Bewegungsrichtung
mit der Variablen <lauf_vorwärts> = 1 mit logisch „zutreffend“ (= 1) bereits vorgegeben ist, sodass
sich der Motor P13 beim
Einschalten mittels Druck auf den Taster
„Knopf A“ in kleinen 60 Schritten im Uhrzeigersinn nach
rechts bewegt (siehe orangefarbenes Zahnrad, d.h. Ritzel P8,
auf der Motorachse des Motors P13 mit den blau und schwarzen
Stromversorgungskabeln). Dabei lässt sich der Antriebsmotor P13 jederzeit durch erneutes
Betätigen des Tasters „Knopf A“ wieder anhalten bzw. ausschalten (siehe Punkt
2.).
(Zum Vergrößern bitte auf
das Bild klicken!) 2.
dem Programmblock <dauerhaft>, das aus insgesamt drei
weiteren Teilblöcken <wenn Knopf A ist geklickt, dann>, <wenn Knopf B ist geklickt, dann> und <wenn schalte_Ein_Aus = 1, dann> besteht. Dabei dient der Teilblock <wenn Knopf A ist geklickt, dann> dazu, den Antriebsmotor P13 umzuschalten. Ist
der Motor ausgeschaltet,
dann lässt er sich durch einfachen Tastendruck
auf den Taster <Knopf A> einschalten
und umgekehrt, indem die Variable
<schalte_Ein_Aus> entweder auf logisch „1“ (= ein, zutreffend) oder „0“ (= aus, unzutreffend) gesetzt wird. Der Teilblock <wenn Knopf B ist geklickt, dann> dient dazu, den Antriebsmotor P13 in seiner Drehrichtung umzuschalten. Ist
die Variable <lauf_vorwärts> auf logisch „1“ (= ein, zutreffend) gesetzt, dann dreht sich
die Motorachse mit dem orangefarbenen Ritzel P8 im Uhrzeigersinn rechts
herum. Bei logisch „0“ (= aus, unzutreffend)
dreht sie sich gegen den Uhrzeigersinn links herum. Dabei verhält es sich so, dass
sich der Antriebsmotor P13
jederzeit während seiner Bewegung in seiner Drehrichtung
umschalten lässt, sodass er beim Richtungswechsel nicht extra angehalten werden muss! Der Richtungswechsel
lässt sich auch im Stillstand
vornehmen, wenn der Antriebsmotor P13
steht!
Achtung: Die beiden Teilblöcke
<wenn Knopf A ist geklickt, dann> und <wenn Knopf B ist geklickt, dann> dienen nur dazu, die eine oder andere Aktion zu veranlassen, d.h. anzustoßen, selbst aber nicht auszuführen! Demzufolge dient der letzte
Teilblock <wenn schalte_Ein_Aus = 1,
dann>
ausschließlich dazu, nur die Funktion
<laufe_Vor_Zurück> aufzurufen! Aber eben
nur dann, wenn die Variable <schalte_Ein_Aus> = 1 ist, d.h. nur wenn der Antriebsmotor
P13 eingeschaltet ist und sich entweder rechtsherum oder
linksherum dreht! Wenn aber die Variable <schalte_Ein_Aus> = 1 ist und der Antriebsmotor P13 eingeschaltet
ist, dann wird die Funktion <laufe_Vor_Zurück> dauerhaft aufgerufen und ausgeführt!
(Zum Vergrößern bitte auf
das Bild klicken!) und 3.
dem Programmblock
<Funktion
<laufe_Vor_Zurück>, der sozusagen das ausführende
Organ, bei der staatlichen Gewaltenteilung in
Deutschland auch Exekutive
genannt, ist und dafür sorgt, dass die zuvor mittels Taster „Knopf A“ oder „Knopf B“ veranlassten Aktionen umgehend ausgeführt und in die Tat
umsetzt werden. Besonders interessant dabei
ist, wie sich der Proxi-Roboter
bewegt, wie erläuft! Einmal losgefahren, läuft er wie der VW Käfer: „… und
läuft und läuft und läuft!“ Bis der Tank leer ist oder beim Proxi-Roboter die Batterien leer
sind. Demzufolge besitzt das
Statement <Proxi läuft vorwärts> oder <Proxi läuft rückwärts> wider Erwarten keine
zeitliche Befristung, kein zeitliches
Limit, sodass sich der Programmierer selbst darum kümmern
muss und ein Stoppsignal setzen muss, wenn der
Proxi-Roboter zum Stillstand
kommen soll. Und da der Proxi-Roboter im vorliegenden Fall
immer nur kleine Vor- oder Rückwärtsbewegungen machen soll, folgt
auf jeden Laufbefehl, der Befehl zum Stehenbleiben. Und zwar alle 20 Millisekunden! Und bei 60 kleinen Trippelschritten dauert die
vollständige Umlaufzeit für nur einen
Vollkreis der beiden schwarzen Zahnräder B9 (links) und A6 (rechts) trotzdem nur 1200 Millisekunden = 1,2 Sekunden! Damit
aber der Benutzer des Proxi-Roboters später die kleinen Vor- oder Rückwärtsbewegungen koordinieren
und jederzeit anhalten kann, gibt es zwischen jeder Bewegung eine zehnmal längere Kunstpause von 200 Millisekunden.
(Zum Vergrößern bitte
auf das Bild klicken!) Nachfolgend
das Projekt „proxi-roboter,
p-16“ mit dem vollständigen
„MakeCode“-Programmkode:
(Zum Vergrößern auf
das Bild klicken!) Wir erweitern das obenstehende Programm
um die <Funktion auswerten_Schrittzähler>. Dabei fällt sofort auf, dass es zwei neue Variablen gibt. Und zwar die Variable <Schrittzähler> und <max_Schrittzähler>. Während die Variable <Schrittzähler> bei jedem Durchlaufen
der < Funktion laufe_Vor_Zurück> um einen Schritt
erhöht wird (siehe hellgrüner
Kasten), wird diese fortwährend mit der Variablen <max_Schrittzähler> und dem Maximalwert = 72 Schritte verglichen:
(Zum Vergrößern bitte
auf das Bild klicken!) Beim Überschreiten des Maximalwertes ≥
72 Schritte wird der Antriebsmotor P13 ausgeschaltet
und der aktuelle Wert des Schrittzählers in der Laufschrift des LED-Displays
angezeigt (siehe oben). Damit sich die beiden Variablen <Schrittzähler> und <max_Schrittzähler> auch tatsächlich
problemlos, d.h. ohne eine Fehlermeldung zu bewirken, nutzen
lassen, sollten diese zuvor im Hauptprogramm
<beim Start> wie folgt initialisiert
werden (siehe hellgrüner
Kasten):
(Zum Vergrößern bitte
auf das Bild klicken!) Wie bereits an anderer Stelle besprochen,
verfügt der Proxi-Roboter leider
über keine präzisen Schrittmotoren,
sondern aus Kostengründen nur über herkömmliche, sehr preiswerte Gleichstrommotoren,
deren Antrieb demzufolge Bauart bedingt über keine Nullstellung (= 00
Winkel der Motorachse) verfügt. Demzufolge dauert der 3600 Durchlauf
eines Vollkreises je nach teils unterschiedlicher Versorgungsspannung über das „Micro USB 2.0“-Kabel mal 70, 71 oder 72 Schritte der festen Schrittlänge von derzeit 20 Millisekunden. Und da die Netzspannung
tagsüber eher etwas niedriger und abends eher etwas höher
ausfällt, kommt man nicht umhin, den Maximalwert = 72
des Schrittzählers öfters mal korrigieren
zu müssen! Da trifft
es sich gut, dass die Variablen <max_Schrittzähler> bereits im Hauptprogramm
<beim Start> initialisiert
wird, sodass man nicht überall in allen
Programmteilen nach dieser suchen
muss, um den Maximalwert = 72 des Schrittzählers jeweils einzeln abändern zu müssen (siehe Projekt „proxi-roboter, p-16“):
(Zum Vergrößern bitte
auf das Bild klicken!) Jetzt steht eindeutig fest, dass eine teils zu
niedrige Versorgungsspannung über das angeschlossene
„Micro USB 2.0“-Kabel des Windows-PCs
unmittelbar dazu führt, dass der Antriebsmotors
P13 langsamer läuft und wegen der geringeren Drehzahl dabei weniger Schritte (= 70)
pro 3600 Durchlauf eines Vollkreises ausführt. Umgekehrt würde der Antriebsmotors P13 bei einer teils höheren Versorgungsspannung etwas schneller
laufen und wegen der höheren Drehzahl
dabei mehr Schritte (= 72) pro 3600 Durchlauf eines Vollkreises ausführen. Demzufolge gibt es also einen Zusammenhang
zwischen der Änderung der Versorgungsspannung ∆U und der sich ändernden Drehzahl ∆n: ∆U ~ ∆n " ∆n ~ 1
/ ∆t " ∆n = 1
/ ∆t * Konstante
c " ∆n = Konstante
c / ∆t " ∆n = 2 π / ∆T ∆n = 2 π / ∆T " n = 2 π / T
" ω = 2 π / T = 2 π f " Winkelgeschwindigkeit " T = Umlaufzeit für einen 3600
Vollkreis! Mit der Winkelgeschwindigkeit ω = 2 π f bestätigt sich, dass
es sich bei der Konstante
c
tatsächlich um die Konstante 2π handelt (siehe auch
weiter unten). Da es sich bei der Vor- und Rückwärtsbewegung des Proxi-Roboters mittels Antrieb durch
den Antriebsmotor P13 und den
beiden schwarzen Zahnrädern B9
(links) und A6 (rechts) um Kreisbewegungen
handelt, haben wir es mit der Kreiszahl Pi „π“ mit π = 3,14159 ≈
3,14 zu tun. Und wenn sich
dabei auch noch die Zahnräder mit
einer bestimmten Geschwindigkeit drehen, dann kommt noch die sogenannte Winkelgeschwindigkeit
Omega „ω“ ins Spiel. So sind z.B. die Holzräder einer Kutsche mit einem rundum
laufenden, flachen Stahlband der
Länge bzw. des Umfangs U =
2 π r
versehen. Und wenn sich die Holzräder während der Fahrt drehen, dann geht es
bei diesen auch um die Umlaufgeschwindigkeit
vUmlauf = s / t mit s = zurückgelegte Wegstrecke und t
= verstrichene Zeit während eines Umlaufs: vUmlauf = s / t " s = Umfang U = 2 π r = 2 π r / t " Mit dem Radius r als sogenannter Einheitsvektor
gilt: r = 1 und für einen Umlauf folgt: t = T = 2 π 1 / T " = 2 π / T " vUmlauf entspricht wegen der Kreisbewegung der Winkelgeschwindigkeit
ω
ω = 2 π / T " mit f = 1 / T ω = 2 π f " f = Kreisfrequenz, gemessen in Hertz [Hz]; Kreisfrequenz wegen der sich
drehenden Zahnräder = 2 π * 1 / T = 2
π / T = n " Drehzahl n,
gemessen in Umdrehungen n / Sekunde = [ 1 / s ] = [ s-1
] Dazu muss man wissen, dass man bei der Winkelgeschwindigkeit ω und den 2 π sowohl dezimal mit 6,28 rechnen kann als auch mit 3600 Winkelgraden für einen Vollkreis: 1.
Fortbewegung des
Proxi-Roboters anhand von selbst
definierten Schritten Mit n = 72 Schritte für einen 3600 Vollkreis folgt: 72 Schritte
" 3600 5
Schritte " n 0 n = 3600 / 72 Dabei geht es
nur um die zurückgelegten Schritte und zwar unabhängig
von der dazu benötigten Zeit! Wenn später der Proxi-Roboter wegen der leicht
angestiegenen 5 V
USB-Stromversorgung
über das „Micro USB
2.0“-Kabel etwas schneller
läuft als bisher, dann ändert
sich an den 72 Schritten für den
Umlauf eines 3600 Vollkreises nichts! Auch und obwohl der 3600 Vollkreis schneller durchlaufen wird! Der Knackpunkt dabei
ist aber, dass dem so sein sollte, aber wider Erwarten dem nicht so ist.
Zwar bewegt sich der Proxi-Roboter schrittweise, weil wir das so gewollt und
auch entsprechend programmiert haben, indem dieser nach jedem Einzelschritt eine Pause von 20 ms + 200 ms = 220 ms einlegt (siehe Bild 26). Davon aber,
dass sich der Antriebsmotor
P13
des Proxi-Roboters bei einer etwas höheren Versorgungsspannung schneller dreht, ändert nichts
daran, dass der Schrittzähler
weiterhin mit n = 72
Schritte
rechnet! Wenn wir aber die bei
den 72 Schritten zurückgelegte Wegstrecke s eines der beiden schwarzen Zahnräder B9 (links) oder A6 (rechts) mit dem Radius r = 10 mm
wie folgt berechnen (siehe Bild 7), U = 2 π * r = 6,28318 * 10 mm ≈ 6,283 * 10 mm =
62,83 mm ≈ 6,28 cm wird der Zusammenhang
gleich deutlicher, wenn man die Umlaufgeschwindigkeit
v für
einen Umlauf mit einbezieht: v1
= s1 / t1
= 6,28 cm / 18,81
s
= 0,33386496 cm/s ≈ 0,334 cm/s v2 = s2 / t2 = 6,28 cm / 18,08 s = 0,347345 cm/s ≈
0,347
cm/s " Motor läuft schneller! s3 = v2 * t1 = 0,347 cm/ Wie man sieht, legt
der Motor in der gleichen Zeit t = 18,81 s eine
deutlich größere Wegstrecke
s3 = 6,53 cm zurück! Wenn aber der Motor in der gleichen Zeit eine deutlich größere
Wegstrecke zurücklegt, dann
macht der auch deutlich mehr Schritte: 6,28 cm
" 72 Schritte 6,53 cm
" x Schritte x = 72 / 6,28 Umgekehrt verhält es sich so, dass der schneller
laufende Motor die gleiche Strecke s2
= 6,28 cm
in kürzerer Zeit t2
= 18,08 s zurücklegt: s4 = v2 * t2 = 0,347345 cm/ 18,81 s
" 72 Schritte 18,08 s
" x Schritte x = 72 / 18,81
2.
Fortbewegung des
Proxi-Roboters anhand der Drehzahl Wenn
der Proxi-Roboter zum Umrunden
eines 3600 Vollkreises
insgesamt n = 72
Schritte benötigt, dann folgt daraus, dass sich der 3600 Vollkreis in 72 schmale und spitze Kreissegmente in Form von sehr schmalen Tortenstücken aufteilt. Dabei ist
jeder Winkel des schmalen und
spitzen Tortenstückes = 3600
/ 72 Kreissegmente = 50 groß. Leider bringt uns die geometrische
Aufteilung des 3600 Vollkreises wegen der fehlenden
Zeitabhängigkeit nicht weiter. Wie wir
aber wissen, dauert eine Umrundung
des 3600 Vollkreises bis zu T = 18,81 s pro Umdrehung. n = 1 / T
" ω = 2 π / T = 2 π f
" ω = 2 π * 1 / T = 2 π * n " ω = 2 π * n " n = ω / 2 π = 1 / 18,81 s = ( 1 / 18,81 ) s-1
= 0,0531632110579479 s-1 ≈ 0,0532 s-1 Für
die Winkelgeschwindigkeit
ω
folgt dann: ω = 2 π * n = 6,28 * 0,0532 s-1 = 0,334096 s-1 ≈ 0,334 s-1 " Die Winkelgeschwindigkeit wird nur für die Umrechnung benötigt! Für
die Berechnung der Drehzahl n folgt: n = ω / 2π = ( = 0,334 s-1 / 6,28 = 0,0531847133757962 s-1 ≈ 0,0532
s-1
≈ 5/100 Umdrehungen pro Sekunde! Probe: n * T
= 0,0532 s-1 * 18,81 s = 1,000692 ≈ 1 þ Da die Berechnung der Drehzahl n für sich allein steht und eben nicht
in Relation zu einem 50 Tortenstück von 72 Teilstücken mit ein
Vollkreis von 3600 steht, bringt uns die Drehzahl-Berechnung nicht
weiter! 3.
Fortbewegung des
Proxi-Roboters mittels Zeitdauer pro Einzelschritt So wie man den 3600
Vollkreis in 72 Tortenstücke zu je 3600 / 72 = 50 /
Tortenstück aufteilen kann, lässt sich dieser auch in 18,81 s / 72 Schritte =
0,26125 s / 1 Schritt
= 0,26125 s / 50
Tortenstück = 0,05225 s / 10 Tortenstück * 3600
= 18,81 s þ aufteilen. Ähnlich verhält es sich mit dem zeitlichen
Maßstab 0,26125 s / 1
Schritt
* 72 Schritte = 18,81 s þ
Ähnlich verhält es sich
auch beim Menschen im Alltag. So ist die allgemeine, d.h. durchschnittliche
Schrittlänge eines Menschen u.a. biologisch durch die Körpergröße und den
Körperbau der Gliedmaßen festgelegt. Wenn wir also auf dem Weg
zur Straßenbahn oder dem Omnibus zu spät dran sind und Gefahr laufen, diese
oder diesen zu verpassen, dann schalten wir einfach „einen Gang höher“ und
laufen schneller, um pünktlich an der Haltestelle anzukommen! Dabei verändern
wir nicht die gewohnte Schrittlänge, sondern die Taktfrequenz (=
Drehzahl = Anzahl der Schritte pro Minute), indem wir bei gleicher
Schrittlänge einfach schneller laufen und dabei mehr Schritte
in kürzerer Zeit zurücklegen! Das Interessante und Wichtige dabei ist, dass sich an der Weglänge von
und zu der Haltestelle nichts ändert, sodass nur das Ziel in kürzerer
Zeit erreicht wird: v = s / t " v + ∆v = s
/ ( t - ∆t )!
Beispiel: s = 1 km, v = 5 km/h, Verspätung ∆t
= 2 min " t =
s / v = 1 km / 5 km/h = 1/5 h = 0,2 h = 0,2 * 1
h = 0,2 * 60 min = 12 min Verspätung ∆t =
2 min " v’ = v + ∆v = s / ( t - ∆t ) = 1 km / ( 12 min - 2 min ) = 1 km / 10 min = 1 km / ( 10 * 1 min ) = 1 km / ( 10 * 1/60 h ) = 1 km / ( 1/6 h ) = 6
km/h
Bei einer Schrittlänge
sl = 50 cm berechnet sich die Anzahl ns der Schritte wie folgt: ns = s / sl = 1 km / 50 cm = 1 * 1
km / ( 50 * 1 cm ) = 1 * 1000 m / ( 50 * 1 * 1/100 m ) = 1 * 1000 m * 100 / (
50 * 1 * = 1 * 1000 Dabei berechnet sich
die Drehzahl n beim Laufen wie
folgt: ω
= 2π n " n
= ω / 2π = ( 2π / T ) / 2π = 1 / T = 1 / ( 12 min
) = 1 / ( 12 * 1 min ) = 1 / ( 12 * 60 sec ) = 1 / 720 sec-1 = 0,0013888888888889 sec-1 ≈
0,0014 sec-1 " bezogen auf t = 12 min " ohne Verspätung! = 1 / ( 10 min
) = 1 / ( 10 * 1 min ) = 1 / ( 10 * 60 sec ) = 1 / 600 sec-1 = 0,0016666666666667 sec-1 ≈
0,0017 sec-1 " bezogen auf t’ = 10 min " mit Verspätung! Wie
wir bereits weiter oben festgestellt haben, bringt uns die Drehzahl n nicht weiter. Berechnung der Einzelschritte pro Zeitdauer: 2000
Schritte / 12 min = 2000 Schritte / 12 * 1 min = 2000 Schritte / 12 * 60 sec
= 2000 Schritte / 720 sec =
2,777777777777778 Schritte / sec ≈ 2,78 Schritte / sec " ( 2,78
Schritte * 50 cm ) / sec = ( 2,78
Schritte * 50 * 1 cm
) / sec = ( 2,78 Schritte * 50 * 0,01 m ) / sec = (
2,78 Schritte * 0,50 m ) / sec =
1,39 m / sec für je einen
Schritt " = Schrittgeschwindigkeit
1,39 m / sec = 1,39 * 1 m / ( 1 * 1 sec ) = 1,39 * 0,001 km / ( 1 * 1 / 3600 h ) =
0,00139 * 3600 km / h = 5,004 km/h ≈ 5,0 km/h bezüglich der
Zeitdauer t = 12 min. Formelmäßig folgt daraus: ns = 2000
" Anzahl der Schritte sl = 50 cm = 50 * 1 cm = 50 * 0,01 m = 0,5
m " Schrittlänge t = 12
min = 12 * 1 min = 12
* 60 s = 720 s " Zeitdauer t in Sekunden Berechnung der Schrittgeschwindigkeit pro Stunde: vSchritt = sEntfernung / t = ( sl * ns ) /
t = 0,5 m * 2000 / 12 min
= 1000 m / ( 12 * 1 min ) = 1000 m / ( 12 * 1/60 h ) = 1 km * 60 / ( 12 h ) = 1 km * 5 /
( 1 h ) = 5 km/h " Schrittgeschwindigkeit bezüglich der Zeitdauer t = 12 min Was
bedeutet es, wenn sich wegen der Verspätung
des Fahrgastes(!) die verbleibende
Zeitdauer auf t = 10 min verringert, um die Straßenbahn
oder den Bus zu erreichen? Wenn
sich wegen der Verspätung die verbleibende
Zeitdauer auf t = 10 min verringert, dann muss man
„einen Zahn zulegen“ und die Schrittgeschwindigkeit auf 6 km/h wie folgt erhöhen: vSchritt = sEntfernung / t = ( sl * ns ) /
t = 0,5 m * 2000 / 10 min
= 1000 m / ( 10 * 1 min ) = 1000 m / ( 10 * 1/60 h ) = 1 km * 6 = 1 km * 6 /
( 1 h ) = 6 km/h " Schrittgeschwindigkeit bezüglich der Zeitdauer t = 10 min Wenn der
Fahrgast seine Schrittgeschwindigkeit steigert, um die Verspätung aufzuholen,
dann muss er seine Antriebsleistung steigern, sodass sich sein Puls (= Herzfrequenz,
Drehzahl) und Blutdruck erhöhen. Demzufolge darf ein älterer Mensch mit
Herz-Kreislauf-Problemen eben nicht schneller laufen und seine
Schrittgeschwindigkeit erhöhen, weil der dann außer Atem kommt und sein Herz
nicht mit spielt. Was also
muss sich ändern, wenn die Schrittgeschwindigkeit mit 5 km/h beibehalten wird und sich auch die zur
Verfügung stehende Zeitdauer t
= 10 min
nicht ändert? vSchritt = sEntfernung / t = ( sl * ns ) /
t " vSchritt * t = sl * ns " sl = vSchritt * t / ns = 5 km/h * 10 min /
2000 = 5 * 10 = 50 m / 36 Wenn die
Schrittgeschwindigkeit mit 5 km/h beibehalten wird, während sich gleichzeitig
die zur Verfügung stehende Zeitdauer auf nur noch t = 10 min verringert, dann verkürzt
sich automatisch auch die in der kurzen Zeit zurücklegbare Strecke sNEU wie folgt: vSchritt = sNEU / t " sNEU = vSchritt * tNEU = 5 km/h * 10 min = 5 * 1 km / h * 10 * 1 min = 5 * 1000 m / 3600 s
* 10 * 60 s = 50 m / 36 Zum
Vergleich: SVORHER = vSchritt * tVORHER = 5 km/h * 12 min = 5 * 1 km / h * 12 * 1 min = 5 * 1000 m / 3600 s
* 12 * 60 s = 50 m / 36 Wenn man
zum Zurücklegen der Strecke SVORHER = 1000 m nur noch tNEU = 10 min zur Verfügung hat, dann bleibt einem
nichts anderes übrig als entweder a)
die Schrittgeschwindigkeit
vSchritt
zu erhöhen oder b)
die Schrittlänge
sl zu
vergrößern, wobei sich dann
zwangsläufig auch die Anzahl der
Schritte ns
verringert (siehe oben!).
Von der Streckengeschwindigkeit zur
Einzelschrittgeschwindigkeit Fassen wir kurz zusammen:
Die Entfernung zur nächsten Haltestelle von Bus oder Straßenbahn beträgt Streckenlänge s = 1000 m,
wozu in der zur Verfügung stehenden Zeit tVORHER = 12 min insgesamt nsVORHER = sEntfernung / slVORHER
= 1000 m / 0,5 m = 2000 Schritte bei einer Streckengeschwindigkeit vStrecke = 5
km/h
zurückgelegt werden müssen. Demzufolge berechnet
sich die Zeitdauer
tEinzelchritt eines einzelnen Schrittes der Schrittlänge
sEinzelschritt = 0,5 m wie folgt: tEinzelchritt = tVORHER / nsVORHER = 12 min / 2000 = 12 * 1 min / 2000 = 12 * 60 s / 2000 = 720 s / 2000 = 0,36 s vEinzelchritt = slVORHER / tEinzelschritt = 0,5 m / 0,36 s = 50 / 36 m/s = 1,388888888888889
m/s ≈ 1,4 m/s Probe durch Umrechnen in
km/h: = 1,4 *
1 m / ( 1 s ) = 1,4 * 0,001 km / ( 1 / 3600 h ) = 1,4
* 0,001 * 3600
km/h = 1,4 * 1/1000
* 3600 km/h = 1,4 * 3,6 km/h = 5,04 km/h ≈ 5 km/h vStrecke = sEntfernung / tStrecke = 1000 m / ( 12 min ) = 1000 * 1 m / ( 12 * 1 min
) = 1000 * 0,001 km / ( 12 * 1/60 h ) = 1 * 60 / 12 km/h = 5
km/h
þ Demzufolge berechnet
sich die Zeitdauer
tEinzelchritt eines einzelnen Schrittes der Schrittlänge
slNEU = 0,6 m wie folgt: tEinzelchritt = tNEU / nsNEU = 10 min / 1667 = 10 * 1 min / 1667 = 10 * 60 s / 1667 = 600 s / 1667 = 0,3599280143971206
s ≈
0,359928 s ≈ 0,36 s vEinzelchritt = slNEU / tNEU = 0,6 m / 0,36 s = 60 / 36 m/s = 1,666666666666667
m/s ≈ 1,7 m/s Probe durch Umrechnen in
km/h: = 1,7 *
1 m / ( 1 s ) = 1,7 * 0,001 km / ( 1 / 3600 h ) = 1,7
* 0,001 * 3600
km/h = 1,7 * 1/1000
* 3600 km/h = 1,7 * 3,6 km/h = 6,12 km/h ≈ 6 km/h vStrecke = sEntfernung / tStrecke = 1000 m / ( 10 min ) = 1000 * 1 m / ( 10 * 1 min
) = 1000 * 0,001 km / ( 10 * 1/60 h ) = 1 * 6
Übrigens:
So, nun haben wir eine ganze Menge zur Kinematik, d.h. der Bewegungslehre aus dem Bereich der Mechanik gelernt,
sodass wir uns wieder dem Proxi-Roboter
und dem Projekt „proxi-roboter,
p-17“ zuwenden können. Dabei geht es nachfolgend darum, dass wir die Zeit t bei der schrittweisen Vor- oder Rückwärtsbewegung des
Roboters mit erfassen und auswerten, um die Schrittweite und Schrittanzahl pro Umdrehung
überwachen und einhalten zu können. Doch zunächst müssen wir herausfinden, ob und
wie sich Zeit überhaupt messen
lässt. In der Schule haben wir gelernt, dass das Jahr 365 Tage hat, ein Tag
24 Stunden lang ist und sich eine Stunde aus 60 Minuten zusammensetzt. Aus
dem Sportunterricht bzw. der Leichtathletik wissen wir, dass ein 100 m Lauf
durchschnittlich in 12 bis 14 Sekunden, vielleicht auch 17 Sekunden
absolviert werden kann, je nach Kondition, Körpergröße und Körpergewicht.
Dabei werden mit herkömmlichen Stoppuhren nicht nur
Minuten gemessen, sondern auch 1/10 Sekunden. Aber es gibt natürlich auch
noch kleinere Maßeinheiten wie z.B. eine hundertstel (= 1/100) oder eine
tausendstel (= 1/1000) Sekunde mit 1/1000 s = 0,001 s = 1
ms („Millisekunde“):
Beispiel einer Umrechnung: t =
5000 ms = 5000
* 1 ms = 5000 *
1 ( „Milli“ * s) =
5000 * 1 ( 1/1000 * 1 s) = ( 5000 * 1 * 1 / 1000
) * 1 s = 5 Mit dem Parameter
<Laufzeit (ms)> lässt sich also die Laufzeit des „micro:bit“-Rechners auslesen! Dabei könnte man meinen, dass es sich dabei um
die Laufzeit seit dem Einschalten des Rechners handelt. Dem ist aber nicht so, weil es sich bei dem „micro:bit“-Rechner und dem Parameter <Laufzeit
(ms)> eben nicht um einen
Betriebsstundenzähler, eine Uhr oder eine Stoppuhr handelt (siehe Projekt „proxi-roboter,
p-18“):
(Zum Vergrößern bitte
auf das Bild klicken!) Wenn man das obenstehende Projekt „proxi-roboter,
p-18“ startet, dann bekommt man direkt nach dem Programmstart den Zeitstempel = 4962 ms angezeigt. Und zwar
beim Betrieb mit der 5 V
USB-Stromversorgung
über das „Micro USB
2.0“-Kabel vom Windows-PCs. Wenn man das „Micro USB 2.0“-Kabel vom Windows-PC abzieht
und die Stromversorgung über das 6 Volt Batteriepack des Proxi-Roboters vornimmt, dann bekommt
man direkt nach dem Programmstart
den Zeitstempel = 5917 ms angezeigt. Wenn man den rückwärtigen „Reset“-Taster drückt, um einen
sogenannten Warmstart
des Programms auszulösen, dann bekommt man nach dem Programmstart von 20
Sekunden beim Betätigen eines der Taster
„Knopf A“ oder „Knopf B“ den Zeitstempel = 20174 ms angezeigt, was der seit dem Programmstart verstrichenen
Zeit von 20,174 s = 20
Sekunden und 174 Tausendstel = 20 Sekunden und 174 Millisekunden entsprechen
dürfte. Wir ändern das obenstehende Programm
dahingehend ab, indem wir uns die nach zwei Minuten verstrichene Zeit mit der Umrechnung = 2 min = 2 * 1 min = 2 * 60
s = 2 * 60 * 1 s
= 120 * 1000 ms = 120 000 ms anzeigen lassen (siehe Projekt „proxi-roboter,
p-19“):
(Zum Vergrößern bitte
auf das Bild klicken!) Schauen wir uns das obenstehende Projekt „proxi-roboter,
p-19“ näher an und beginnen wir beim Programmblock „beim Start“:
(Zum Vergrößern bitte
auf das Bild klicken!) Wie wir wissen, wird der obenstehende Programmblock „beim Start“ nach dem Herunterladen und Starten des
Programms auf dem „micro:bit“-Rechner als Erstes ausgeführt. Dabei dient das Statement <zeige_Zahl
[ Laufzeit (ms) ]> dazu, die aktuelle Laufzeit mit der Maßeinheit
[ ms ]
auszulesen und als Laufschrift im LED-Display anzuzeigen. Wie bereits weiter
oben erwähnt, wird dabei der Zeitstempel
= 4962 ms
angezeigt. Lässt man das Programm in der „MakeCode“-Entwicklungsumgebung von Microsoft laufen, dann bekommt man
die Zeitstempel 4601, 4605 oder
4622
angezeigt, was darauf hindeutet, dass es sich beim Parameter [Laufzeit
(ms)] zunächst um Zufallswerte handelt. Insbesondere deshalb, weil es sich bei dem Parameter um eine interne Variable des „micro:bit“-Rechners handeln dürfte, die
bisher noch nicht initialisiert wurde.
Dies ist dann auch der Grund dafür, dass es im
gesamten Projekt „proxi-roboter,
p-19“ zunächst keine einzige frei definierte Variable gibt, die gegebenenfalls initialisiert
werden müsste. Im Programmblock
<dauerhaft> wird als Erstes zwei
Minuten lang gewartet bis die
Laufzeit > 2 Minuten und
< 2,03 Minuten erreicht ist: 2 min = 2 * 1 min = 2 * 60 sec = 2 * 60 * 1 sec = 2 * 60 * 1 000 ms (" Millisekunden) = 120
* 1 000 ms = 120 000 ms 12 2,03 min = 2,03 * 1 min = 2,03 * 60 sec = 2,03 * 60 * 1 sec = 2,03 * 60 * 1 000 ms = 121,8 * 1 000 ms = 121 800 ms 121 800 Die Zeitspanne von 2 Minuten wurde extra so
gewählt, weil man auf diese Weise mit der Stoppuhr auf dem Smartphone sehr
gut und einfach überprüfen kann, ob die Zeitfunktion auch zuverlässig
funktioniert. Und in der Tat verhält es sich so, dass die Timerfunktion <
Laufzeit (ms)> erstaunlich präzise
funktioniert! Dazu muss man wissen, dass jede CPU, engl. „Central Processing Unit“, d.h. Zentraleinheit,
über einen internen quarzstabilisierten
Taktgenerator
verfügt, der den Mikroprozessor,
auch den des „micro:bit“-Rechners, mittels des sogenannten Prozessortaktes
präzise steuert. Dabei gilt es zu beachten, dass dem Mikroprozessor mit jedem
Programmbefehl, jedem Statement eine bestimmte Taktzahl und Taktfolge zugewiesen wird, innerhalb denen ein
Befehl schritt- und taktweise abgearbeitet wird. Schließlich geht es beim Mikroprozessor auch darum, dass z.B.
der Datenaustausch zwischen dem Prozessor, der ALU,
engl. „arithmetic logic unit“, d.h. Rechenwerk,
dem Arbeitsspeicher
und der Peripherie wie z.B.
Festplatte, USB-Speicherstick usw. synchronisiert wird, damit keine
Daten verlorengehen. Demzufolge
läuft der Prozessortakt,
währenddessen der Prozessor mehrere Befehle abarbeitet, ununterbrochen und
hochpräzise weiter! Das gilt auch für den Mikroprozessor „ARM Cortex M0“
des „micro:bit“-Rechners.
(Zum Vergrößern bitte
auf das Bild klicken!) Mit dem Programmblock
<wenn Knopf A ist geklickt dann> lässt sich jederzeit der aktuelle Status des Hochzählens auf Knopfdruck „A“ abrufen und dezimal mit zwei
Nachkommastellen in der Maßeinheit [ min ] (" Minuten) anzeigen: 1 min = 1 * 1 min = 1 * 60 s = 60 * 1 s = 60 * 1/1 000 ms = 60 000 ms Am Ende des Programmblocks wird dann der „micro:bit“-Rechner auf Neudeutsch „resettet“, d.h. zurückgesetzt, sodass der Rechner einen
sogenannten Warmstart (=
Neustart im eingeschalteten Zustand) durchführt und das Projekt „proxi-roboter,
p-19“
neu startet:
(Zum Vergrößern bitte
auf das Bild klicken!) Mit dem Programmblock
<wenn Knopf B ist geklickt dann> lässt sich zwar die zweiminütige Laufzeit mit den 120 000 ms nicht verkürzen, aber der aktuelle
Status des Hochzählens auf Knopfdruck „B“ abrufen und dezimal mit zwei
Nachkommastellen in der Maßeinheit [ min ] (" Minuten) anzeigen:
(Zum Vergrößern bitte
auf das Bild klicken!) Mit dem nachfolgenden Projekt „proxi-roboter-p-20“
entwickeln wir das bisherige Programm
weiter, indem wir nun Variablen verwenden.
>>
Technik: ·
einen Platzhalter oder eine vorerst nicht benötigte Variable beim Programmieren ·
in der Computertechnik eine Datei, die angelegt wird, um die Funktionsweise eines Programms oder
Versuchsaufbaus zu testen ·
in der Regression (Statistik)
eine Dummy-Variable ·
eine unter Elektrotechnikern verbreitete
engl. Bezeichnung für Ersatzlast << (Quelle: Wikipedia) Zwecks besserer Lesbarkeit des Programms und zu Zwecken des besseren Verständnisses rechnen wir ab sofort nur noch in Minuten [ min ] = [ ’ ] und nicht mehr in Millisekunden [ ms ] = [ 0,001 s ] = [ 1/1000 s ] = [ 1/1000 ’’ ] (= tausendstel
Sekunden). Demzufolge wird der Zeitstempel <Laufzeit (ms)> gleich zu Beginn des Programmblocks <dauerhaft> eingelesen und
mittels der mit dem Wert 60 000 initialisierten Variablen <umrechnen_ms_min> in Minuten umgerechnet und in der Variablen <temp_Laufzeit_min> zur weiteren Verwendung gespeichert:
(Zum Vergrößern bitte
auf das Bild klicken!) Selbstverständlich lässt sich auch das
obenstehende Programm weiter verbessern, indem wiederkehrende und sich
wiederholende Programmteile
(Zum Vergrößern bitte
auf das Bild klicken!) in die Funktion <zeige_Laufzeit_min> wie folgt auslagern:
(Zum Vergrößern bitte
auf das Bild klicken!) Schauen wir uns noch den vollständigen Microsoft „MakeCode“ des Projektes „proxi-roboter-p-21“
an:
(Zum Vergrößern bitte
auf das Bild klicken!) Vom guten alten VW Käfer der
Volkswagen AG wurden in 65 Jahren von 1938 bis 2003 insgesamt 21,5 Millionen
Fahrzeuge gebaut. Dabei lautete einer der bekanntesten Werbesprüche „Und läuft
und läuft und läuft …“. Obwohl doch ein Auto fährt und nicht läuft. Wenn also das Auto fährt und nicht läuft, weil
es keine Beine und Füße hat, weshalb sagt dann der Werbespruch, dass der VW
Käfer läuft und läuft und läuft? Wahrscheinlich deswegen, weil die
Automobilverkäufer und Marketing-Fuzzis (= engl. „Fuzzy“, umgangssprachlich
„beliebige männliche Person, die nicht ernst genommen wird“) keine Physiker
oder Techniker sind, sondern Kaufleute. Denn wenn etwas gut läuft, dann
sprechen die Kaufleute von einem „Selbstläufer“. Damit ist gemeint, dass sich
eine Sache wie der VW Käfer wie von allein verkauft, sich der Verkäufer beim
Verkaufsgespräch nicht anstrengen muss, keine Überzeugungsarbeit leisten oder
den Kunden überreden muss. Aber obwohl der VW Käfer fährt und nicht
läuft, läuft trotzdem etwas! Und zwar im Hintergrund! Ab Anfang 1970 gab es
nämlich ein neues Modell, den VW Käfer 1302 mit stärkerem Motor und höherem
Gewicht. Und seitdem läuft er, der Sprit, d.h. der Kraftstoff im Tank und der
Mehrverbrauch, der sich bei der Tankuhr direkt an der Bewegung des
Füllstandsanzeigers ablesen lies. Dabei belief sich der Spritverbrauch bei
sportlicher Fahrweise auf teilweise bis zu 14 Litern pro 100 km! Dabei
bewegte sich der Füllstandsanzeiger so flott in Richtung der 5 Liter
Reserveanzeige, dass man gar nicht auf die Uhr schauen musste, um zu wissen
was die Stunde geschlagen hat. Wobei wir beim Stichwort „Zeit“ angelangt sind. Die
läuft und läuft und läuft nämlich auch beim Proxi-Roboter. Aber eben still und leise, sodass man sie nicht
ticken hört. Wie bereits erwähnt, hängt das mit der Taktfrequenz des „ARM
Cortex M4 32 Bit“-Prozessors des „micro:bit“-Rechners der Version 2.x zusammen. In dem Moment, wo man den Proxi-Roboter durch Einschalten der Stromzufuhr in Betrieb nimmt, läuft die Zeit mit
der Taktfrequenz von f = 64 MHz (=
„Megahertz“ = 106 Hz = 1 000 000 Hz = 1 Million Schwingungen pro
Sekunde). T = 1 / f = 1 / 64 MHz = 1 / ( 64 * 1 MHz ) = 1 / ( 64 * 1 * 106 Hz ) = 1 / ( 64 * 1 * 106
s-1 ) = ( 10-6
/ 64 ) s = (
10-6
/ 64 ) s = ( 1 / 64 ) µs
= 0,015625 µs ≈ 0,016 µs Und siehe da, gibt es bei der „MakeCode“-Programmierung tatsächlich auch eine
Systemvariable <Laufzeit (micros)> mit der sich die Laufzeit
in „Mikrosekunden“ [µs] abfragen lässt:
(Zum Vergrößern bitte
auf das Bild klicken!) Ob wir früher oder später auch mit den „Mikrosekunden“ [µs] und der Systemvariable <Laufzeit (micros)> arbeiten werden, wird sich aber noch zeigen. Wie aber soll man mit der Laufzeit umgehen, wie lässt sich diese am
besten handhaben? Dabei ist das mit der Laufzeit so ähnlich wie mit dem Geist, den man aus der Flasche gelassen hat und der sich nicht
wieder einfangen lassen will (siehe Grimms
Märchen). Wenn die Zeit erst einmal läuft, dann läuft sie und läuft und
läuft. Wie aber wird die Zeit
gestartet und wie kann man sie sich jederzeit wieder anzeigen lassen? Wie wir ja bereits wissen, leitet sich die Zeit aus dem Prozessortakt
ab, sodass man diese nicht extra starten muss. In dem Moment, wo man
den „micro:bit“-Rechner „unter Strom setzt“, d.h. einschaltet,
startet sich mit dem Prozessortakt auch die Zeit,
die wiederum im Hintergrund im Stillen vor sich hin werkelt. Wenn man dann aber nach dem Programmstart <beim Start> oder im Programmblock
<dauerhaft> mit der Zeit arbeiten will, dann geht das nur in
Verbindung mit der Systemvariablen
<Laufzeit (micros)>, die wiederum beim Erstgebrauch zuvor noch initialisiert
werden muss:
(Zum Vergrößern bitte
auf das Bild klicken!) Dabei gilt es, wie bereits erwähnt, zu
beachten, dass der erste Wert
der Laufzeit weggeworfen
werden muss und nicht verwendet werden darf! Ferner stellt sich die
Frage, wie sich alle anderen, nachfolgenden Werte der Systemvariablen <Laufzeit (micros)> speichern lassen, da mit jedem Knopfdruck auf den Taster
< Knopf A> ein neuer Laufzeitwert generiert wird, den es abzuspeichern
gilt. Die Möglichkeit, dass man für jeden
neuen Laufzeitwert auch eine neue
·
Variable <Laufzeit_1>, <Laufzeit_2>, …, <Laufzeit_n> oder ·
Variable <Laufzeit1>, <Laufzeit2>, …, <Laufzeitn> generiert, scheidet
aus, da sich diese programmiertechnisch nicht
indexieren lassen! Programmiertechnisch
indexieren lässt sich hingegen die nachfolgende Syntax ·
Variable <Laufzeit[0]>,
Variable <Laufzeit[1]>, <Laufzeit[2]>, …, <Laufzeit[n]>
Dabei steht der Index [n] für eine beliebige
Anzahl von n
Einzelelementen,
die sich in einem engl. „Array“, d.h.
einer Liste oder Tabelle zusammenfassen
lassen.
Wenn man nachfolgend zum ersten Mal den
Taster <Knopf
A> drückt, dann wird dem Array <list> nach dem Signalton <Mittleres C> der aktuelle Wert der Systemvariablen <Laufzeit (micros)> am Ende des Arrays hinzugefügt:
(Zum Vergrößern bitte
auf das Bild klicken!) Nach der Laufschriftanzeige
„ > “ wird dann noch die Länge „1“
des Arrays <list> angezeigt. Damit ist die Anzahl n = 1 der im Arrays <list> gespeicherten Elemente gemeint! Im vorliegenden Fall gibt es also zum
jetzigen Zeitpunkt nur ein einziges Element des Arrays <list> mit der Array-Variablen list[0] = 0,35 min (als Beispielwert). Wichtig dabei ist, dass das erste Element den Index [0] trägt! Der Grund dafür ist der, dass sowohl in der Mathematik als auch in der Informatik die Zahl 0 (nicht Ziffer „0“) eine vollwertige, quasi
emanzipierte Zahl ist, mit der
sich auch rechnen lässt und mit der auch gerechnet wird! Mittels des nachfolgenden Programmblocks wird
nach der Laufschriftanzeige „ >> “ der Inhalt des ersten Array-Elments
list[0] = 0,35
min
angezeigt und dabei sofort in Minuten
[min]
umgerechnet:
(Zum Vergrößern bitte
auf das Bild klicken!) Beim letzten Programmblock wird nach der Laufschriftanzeige „ >>> “ der Inhalt des letzten
Array-Elments list[0] = 0,35
min
angezeigt und dabei sofort in Minuten
[min]
umgerechnet:
(Zum Vergrößern bitte
auf das Bild klicken!) Interessant und beachtenswert ist dabei, dass
mit dem Statement
(Zum Vergrößern bitte
auf das Bild klicken!) zunächst die Array-Größe des Arrays <list> mit der Array-Länge auf die Zählvariable n gesetzt wird. Dabei ist n = 1, weil das Arrays <list> zum derzeitigen
Zeitpunkt nur ein einziges
Array-Element enthält: list[0] = 0,35 min. Und da das erste
Array-Element list[0] = 0,35 min mit dem Index n = 0 beginnt, muss man von der ermittelten Array-Länge n = 1 noch den Wert = 1 subtrahieren,
sodass der erste Wert list[0] = 0,35 min des Arrays <list> gleich dem letzten Wert list[0] = 0,35 min des Arrays ist! Demzufolge muss man immer daran denken, dass
der erste Wert eines Arrays stets beim Index = 0 beginnt (siehe Projekt
„proxi-roboter-p-22“):
(Zum Vergrößern bitte
auf das Bild klicken!) Im Zusammenhang mit dem obenstehenden Projekt „proxi-roboter-p-22“
stellt sich noch die Frage, ab wann die „Laufzeit (ms)“-Millisekunden-Uhr zu laufen beginnt, d.h. gestartet wird: 1.
sofort beim Starten des Programms mit dem Programmblock 2.
beim Ausführen des Statements 3.
beim erstmaligen Drücken
des Tasters 4.
beim Ausführen des Statements Antwort: >> Beim Ausführen des Statements <setze dummy_Zeit auf [ Laufzeit (ms) ]> Begründung: Wie
bereits weiter oben erklärt, wird die „Laufzeit
(ms)“-Millisekunden-Uhr in dem Moment gestartet, wo man sich die interne
Systemvariable <Laufzeit (ms)>
in der Laufschrift des LED-Displays anzeigen lässt oder, wie im vorliegenden
Fall, diese der Variablen
<dummy_Zeit> mittels Deklaration
zuweist. Dabei spielt es keine Rolle, ob der erste Zeitwert einen gültigen, d.h. zutreffenden
Zeitstempel enthält oder nicht. << Wenn du die Antwort nebst Begründung
sehen willst, dann musst du nur im Browser
die linke Maustaste gedrückt halten
und mit dem Mauszeiger über die Kennzeichnung im Bereich >> ___ << fahren und diesen entsprechend
markieren! Der Trick dabei ist nämlich der, dass die gelbe
Textfarbe die gleiche ist wie
für die Hintergrundfarbe der Schrift! Wir entwickeln das Programm weiter, sodass es
sich als Stoppuhr verwenden lässt.
Dabei achten wir darauf, dass die zeitkritischen Statements (siehe grüne Kästen) gleich zu Beginn des Quellkodes
im Projekt „proxi-roboter-p-23“
stehen:
(Zum Vergrößern bitte
auf das Bild klicken!) Wenn man mit der Stoppuhr
auf dem Smartphone die gemessene bzw.
gestoppte Zeit mit der des obenstehenden
Programms vergleichen will, dann muss man die Stoppuhr des Smartphones zeitgleich
mit dem Programmstart des obenstehenden
Programms starten! Beim Vergleich der auf dem Smartphone angezeigten Stoppzeit fällt auf, dass diese ·
erst in 1/100
Sekunden,
·
dann in Sekunden und 1/100 Sekunden,
(Zum Vergrößern bitte
auf das Bild klicken!) ·
anschließend in Minuten:Sekunden und 1/100 Sekunden und ·
später auch in Stunden:Minuten:Sekunden angezeigt wird. Im Programm des Projekts „proxi-roboter-p-23“
wird aber die Stoppzeit wegen des Umrechnungsfaktors von Millisekunden auf Minuten
= 1000 ms * 60 s = 60 000 min
nur in Minuten gefolgt von einem Dezimalpunkt
plus zwei Dezimalstellen wie z.B. 2.25 min angezeigt! Dabei stehen die zwei Dezimalstellen „.25“, aber eben nicht
für 25/100 Sekunden, sondern für 25/100 Minuten(!), da wir ja die gemessenen Millisekunden [ms] im obenstehenden
Programm in Minuten
[min]
nebst zweier Dezimalstellen wie folgt umgerechnet
haben: 2,25 min = 2,25 * 1 min = 2,25 * 60 sec = 135 sec = 135 * 1 sec = 135 * 1000 ms = 135 000 ms 135 000 ms = 135 000 * 1 ms = 135 000 * 1/1000 s = 135 000 * 0,001 s = 135 s = 135 * 1 s = 135 * 1/60 min = 2,25 min Demzufolge muss man den im Programm angezeigten Wert von 2,25 min noch wie folgt in „echte“ Sekunden umrechnen: 2 Min. + 25/100
Minuten. = 2,25 Min. = 2,25 * 1 Min.
= 2,25 * 60 Sek. = 2 Min. + 15/60 Minuten = 2 Min. + 15 Sekunden 0,25 Minuten = 25/100
Minuten(!)
= 1/4 Min. = 1/4 * 1 Min. = 1/4 * 60 Sek. = 15 Sekunden(!) =
15/60 Minuten(!)
" 2,25 = 2 * 60 sec + 0,25/100 * 60
sec = 120 sec + 0,25/100 * 60
sec = 120 sec * 15 sec = 2 min + 15 sec
Das Projekt
„proxi-roboter-p-24“
basiert auf dem Vorgänger-Projekt „proxi-roboter-p-23“, sodass der Programmblock <beim Start> beider Programme
identisch ist. Der Programmblock
<dauerhaft> hingegen wurde
erweitert und zwar dahingehend, dass sich mit diesem jetzt zwei
verschiedene Arten von Stoppzeiten anzeigen lassen: 1.
Anzeige der gestoppten Zeit in Minuten und hundertstel
Minuten, wie z.B. 2,25 min100 = 2 Minuten und 25/100
Minuten = 2
Minuten und 25 Sekunden100
2.
Anzeige der gestoppten Zeit in Minuten und sechzigstel
Minuten, wie z.B. 2,15 min60 = 2 Minuten und 15/60 Minuten = 2 Minuten und 15 Sekunden60
Dabei entspricht die
Anzeige der gestoppten Zeit in Minuten
und sechzigstel Minuten der unseres Alltags,
d.h. unserer Armbanduhr, Stoppuhr oder Stoppuhr auf dem Smartphone usw. Dementsprechend muss
man bei der Addition („+“) oder Subtraktion („-“) zweier
Minutenanzeigen diese wie folgt be- und umrechnen: 2,15 min100 + 2,55
min100 = 2 min60 + 15/100 * 60
sec60 + 2
min60 + 55/100 * 60 sec60
= 2 min60 + 15 * 0,6 sec60
+ 2 min60 + 55 *
0,6 sec60 = 2 min60 + 9 sec60
+ 2 min60 + 33 sec60 = 4 min60 + 42 sec60 = 4 min60
+ 42 * 1 sec60 = 4 min60
+ 42 * 1/60 * 100 sec100 ≈ 4 min60
+ 42 * 1,667 sec100 = 4 min60
+ 70 sec100
= 4 min60 + 70 * 1 sec100 = 4 min60 + 70 * 1/100 min100 = 4 min60
+ 0,7 min100
= 4,7 min100 Spätestens jetzt sieht man sehr deutlich, dass die in der
Schule gelernte Zeitrechnung von 1 Tag = 24 Std. sowie 1 Std. = 60 Min. und 1
Min. = 60 Sekunden mit 1 std = 60 min = 60 * 1 min = 60 * 60 sec = 3600 sec
zwar inzwischen „in Fleisch und Blut“ übergegangen ist, aber trotzdem rechnerisch sehr unpraktisch ist,
weswegen Mikrocontroller wie der „micro:bit“-Rechner mit der „MakeCode“-Block-Programmierung ausschließlich dezimal rechnen: 2,25 min100 + 2,917 min100 = 5,167 min100 = 5 min60 + 0,167 min100 = 5 min60 + 167/1000 min100 = 5
min60
+ 167/1000 * 1
min100 = 5 min60 + 167/1000
* 1/100 * 60 min60 = 5
min60
+ 167/1000 * 0,6
min60 = 5 min60 + 0,1002
min60 ≈ 5,1 min60 = 5 min60 + 1/10 * 1 min60 = 5 min60 + 1/10 * 60 sec60 = 5 min60 + 6 sec60 = 5 min60
+ 6 * 1 sec60
= 5 min60 + 6 * 1/60
min60
= 5 min60 + 0,1 min60 = 5 min60
+ 0,1 * 1 min60 = 5 min60
+ 0,1 * 1/60*100 min100 = 5 min60
+ 0,1 * 1,667 min100 = 5 min60
+ 0,1667 min100 ≈ 5,167
min100
Gemäß dem sogenannten „EVA“-Prinzip
besteht der Programmblock <beim Start> aus zwei Teilen
und zwar 1.
dem Einlesen
des aktuellen Zeitstempels <Laufzeit
(ms)> beim Drücken des Tasters „Knopf A“, dem anschließenden Umrechnen
des Zeitstempels von Millisekunden in Minuten100 mit zwei Nachkommastellen für die hundertstel
Minuten100 (= Sekunden100) und der Wertezuweisung an das numerische
Array <list>. Dabei gilt es zu
beachten, dass mit jedem Drücken des Tasters
„Knopf A“ ein neuer und
aktueller Zeitstempel dem numerischen
Array <list> automatisch am Ende hinzugefügt wird:
(Zum Vergrößern bitte
auf das Bild klicken!) 2.
dem Auslesen
des gespeicherten Zeitstempels
<Laufzeit (ms)> aus dem numerische
Array <list>. Dabei gilt es zu beachten, dass immer der letzte,
aktuelle Wert am Ende des numerischen Arrays <list> ausgelesen wird. Zu diesem Zweck muss
man natürlich zuvor noch die Länge des numerischen Arrays <list> bestimmen. Von der Länge des numerischen
Arrays <list> muss man dann noch -1
subtrahieren, um auf die tatsächliche Länge zu kommen, weil das erste
Element des Arrays <list> immer beim Index = 0 beginnt:
(Zum Vergrößern bitte
auf das Bild klicken!) Als nächstes wird der letzte
Wert mit Index = n-1 des numerischen
Arrays <list> eingelesen und der Variablen
<anzahl_min_100> zugewiesen, im
nächsten Statement in eine Zeichenkette, engl.
„string“, umgewandelt und der alphanumerischen
Variablen <anzahl_min_100_Str> zugewiesen. Dabei wird der bisher numerische Wert wie z.B. der Zeitstempel 5,167 [min100] in den String „5.167“ in Form von alphanumerischen
Zeichen (= Buchstaben, Ziffern(!),
Leer- oder Sonderzeichen) umgewandelt. Während man mit Zahlen rechnen kann, handelt es sich bei den Ziffern quasi um entsprechende Symbole mit denen sich nicht mehr rechnen
lässt; ähnlich wie bei den römischen Ziffern
auf dem Ziffernblatt (nicht
Zahlenblatt!) einer analogen Wanduhr. Übrigens: Das römische
Zahlensystem konnte sich weltweit nicht dauerhaft durchsetzen, weil sich
mit den römischen Zahlen nicht rechnen lässt: MMXXII = M + M + X + X + II = 1000 + 1000 + 10 + 10 + 2 = 2000 + 20 + 2 = 2022 . Der
Grund dafür ist der, dass es bei den „römischen Zahlen“ keine Wertigkeit (= Stufigkeit im Sinne
eines 10er Multiplikators) wie z.B. Einer (= E, 1 = 100 ),
Zehner(= Z, 10 = 101 ), Hunderter (= H, 100 = 102 ),
Tausender (= T, 1000 = 103 ) usw. gibt: 2022 = 2 * 103
+ 0 * 102 + 2 * 101
+ 2 * 100 = 2 * 1000 + 0
* 100 + 2 * 10 + 2 * 1 = 2000 + 0 + 20 + 2 Zurück zum String „5.167“, der mittels des Statements
auf den Dezimalpunkt „ . “ hin durchsucht wird.
Demzufolge befindet sich dieser beim String
„5.167“ an der Position = 1, weil die erste Stelle „5“ des Strings der Position = 0 entspricht! Mit der bekannten
Position des Dezimalpunktes „ . “ lässt sich nun der String „5.167“ in den linken Teil mit den ganzzahligen Werten inkl. der Null (" Variable <anzahl_min_100_Str>) und in den rechten
Teil mit den Dezimalstellen (" Variable <anzahl_sec_100_Str>) aufteilen. Dabei handelt es sich
bei beiden Variablen <anzahl_min_100_Str> und anzahl_sec_100_Str um Variablen vom Typ „string“ (= alphanumerische Zeichenkette), sodass sich
mit diesen nicht rechnen lässt! Da das Statement
mit der Variablen <anzahl_min_100_Str>
(Zum Vergrößern bitte
auf das Bild klicken!) den ursprünglichen Variableninhalt (= String
„5.167“) mit dem Ergebniswert (= String „5“) überschreibt,
der Originalwert also verlorengeht, müssen wir als Erstes das Statement mit der Variablen
<anzahl_sec_100_Str> und den Nachkommastellen
(= String „167“) programmieren:
(Zum Vergrößern bitte
auf das Bild klicken!) Nach der
„string“-mäßigen Aufspaltung des ursprünglichen
Variableninhalts (= String „5.167“) in Vor- und Nachkommastellen möchte man natürlich auf
Nummer sicher gehen und wissen, ob die Aufspaltung erwartungsgemäß
funktioniert und das richtige Ergebnis liefert:
(Zum Vergrößern bitte
auf das Bild klicken!) Selbstverständlich
lässt sich der aufgespaltete String (= String „5.167“ = String „5“ + String „167“ ) auch als Ganzes
darstellen:
(Zum Vergrößern bitte
auf das Bild klicken!) Ähnlich verhält es sich
bei der zusammengesetzten Darstellung mit der Anzeige der 60er Sekunden.
Dabei lässt sich die Umrechnung
von 100er Sekunden in 60er Sekunden wie folgt vornehmen: 0.167 s100 ≈ 0.17 * 1 s100 = 0.17
* 1/100 * 60 s60 = 0.17 * 0,6 s60 = 0,102 s60 ≈ 0,10 s60
(Zum Vergrößern bitte
auf das Bild klicken!)
Außerdem gibt es noch
einen Programmierfehler, den es noch zu beheben gilt. Und zwar den, dass die Nachkommastellen der Variablen <anzahl_sec_60> vor der Umwandlung in die Variable
<anzahl_sec_60_Str>
wider Erwarten nicht abgeschnitten werden. Zwar
werden bei der Stoppzeit von 5.167 min100 nur zwei Nachkommastellen = 16 sec100 von
vormals 167 sec100
berücksichtigt 16 sec100 = 16 * 1 sec100 = 16 * 0,6 * 1 sec60 = 9,6 sec60 , trotzdem aber beim Ergebniswert = 9,6 sec60 nicht auf die
ganzzahlige Nachkommastelle = 9 sec60 abgeschnitten, sodass
man mit dem Statement
die Laufschriftanzeige „3,9,6 min“ und eben nicht „3,9 min“ angezeigt bekommt. Mit dem Projekt „proxi-roboter-p-25“
und dem erweiterten Programmkode
(Zum Vergrößern bitte
auf das Bild klicken!) wird das Problem
behoben. Wenn man das Projekt „proxi-roboter-p-25“
testen will, dann muss man die Stoppuhr
auf dem Smartphone zeitgleich zusammen
mit dem Programm starten und bei
diesem exakt beim Zeitstempel 3 Min. 10 Sek. auf den Taster „Knopf A“ des „micro:bit“-Rechners drücken. In der
Laufschrift bekommt man dann sowohl die Anzeige „~> 3.16 min“ (= min100)
als auch „~~> 3,9 min“ (= min60)
angezeigt.
Wir erweitern den Programmkode des Projektes „proxi-roboter-p-25“ dahingehend, dass wir die Umrechnung der 100er Minuten in 60er Minuten und der
100er Sekunden in 60er Sekunden in die beiden
Funktionen 1.
2.
auslagern, sodass sich
der Programmkode im Projekt „proxi-roboter-p-26“
entsprechend übersichtlicher gestaltet. Dabei gilt es zu beachten, dass die
vorgenannte Reihenfolge der Funktionen 1.) und 2.) bei der Umrechnung zwingend einhalten werden
muss, weil Ergebniswerte verschiedener Variablen im Laufe der Umrechnung überschrieben
werden:
(Zum Vergrößern bitte
auf das Bild klicken!) Wenn man sich bei der Umrechnung von 100er Minuten in 60er Minuten mangels
Übung wieder unsicher ist, wie man den Umrechnungsfaktor
k ermittelt, dann hilft einem nachfolgende Vorgehensweise wieder auf die
Sprünge: 1 min100 " 1 min60 " 1
min100 =
k * 1 min60 " mit 1 min100 = 1/100 std100 1/100
std100 = k * 1/60 std60 " k = 1/100 std100 / ( 1/60 std60 ) = 1/100 = 1/100 * 60 = 60 / 100 = 0,6
1
min100 =
k * 1 min60 k * 1 min60 = 1 min100 1
min60 =
1 min100 / k = 1 min100 / 0,6
= 1 min100 / ( 6/10
) = 10/6 * 1 min100 ≈
1,67 * 1 min100 oder 1
min100 ≈
1 min60 / 1,67 = 0,6 * 1 min60 Beispiel (siehe oben) 5.167 min100 = 5,167 * 0,6 * min60 = 3,1002 min60 ≈
3,10 min60
" 3 min60 und 10 sec60
Ansonsten lässt sich
die Umrechnung auch mittels Dreisatz wie folgt lösen: 100 min100
" 1 Std100 60 min60
" x Std60
___________________ x
= 1 Std100 / 100 min100 * 60 min60 = 60/100 Std60 = 0,6 Std60 Auch obwohl es zwei
verschiedene Zeitmessverfahren gibt, nämlich 1.
die Zeitmessung in 60 Minuten [ ’ ] [ min ], 100 Sekunden [ “
] [ s ] und Millisekunden [ ms
] (=1/1000 Sekunden) beim „micro:bit“-Rechner und 2.
die Zeitmessung in 60 Minuten [ ’ ] [ min ], 60 Sekunden [ “
] [ s ] bei Armband-, Wand-
und Küchenuhren und Kurzzeitmessern für das hart gekochte 7-Minuten- oder weiche
4-Minuten-Frühstücksei und mit 1/10 Sekunden [ s ] und 1/100 [ s ] bei der
Stoppuhr für den 100 m Lauf im Alltag gibt, so bewegen sich
trotzdem beide im Dezimalsystem,
sodass sich mit diesen rechnen lässt. Wenn man aber beim Taschenrechner
z.B. die Zeit von 4 Minuten und 45 Sekunden in der Form 4,45 min60
eintastet und den Wert 30 Sekunden addiert, dann bekommt man als
Ergebnis = 4,45 + 30 = 34,45 ý angezeigt, weil der Taschenrechner von sich
aus nicht weiß, nicht wissen kann, dass es sich bei dem Wert 30
um Sekunden und nicht um Minuten handelt. Der Taschenrechner
rechnet nämlich dimensionslos, d.h. ohne irgendwelche Maßeinheiten! Bei dem Wert 30 kann
man nämlich sehr wohl zum Ausdruck bringen, dass es sich bei diesem um
Sekunden handelt, nämlich mit 30 s = 30/60 min = 1/2 min = 0,5 min Wer darüber hinaus
meint, dass es sich bei 4,45 min um 4 Minuten und 45 Sekunden (= 4’ 45“ = 4:45) handelt, liegt wegen der Zehntel und Hundertstel der Dezimalstellen falsch! Trotzdem kann man natürlich zum Ausdruck bringen, dass es
sich bei der Angabe 4,45 um 4 Minuten und 45 Sekunden handeln soll, d.h. mit sechzigstel
Minuten gerechnet werden soll. Nur muss man das entsprechend zum Ausdruck bringen bzw.
kenntlich machen! Mit der Angabe 4 Minuten + 45/60 Minuten = 4 Minuten + 3/4
Minuten = 4 Minuten und 45 Sekunden gibt es aber keine Missverständnisse: 4,45 min60 = 4 min60 + 45/100 min60 = 4
min60 + 45/100
* 1 min60 = 4 min60 + 0,45 * 1 min60 = 4 min100 + 0,45 * 1,667 min100 = 4 min100 + 0,75 min100 = 4 min100 : 75 sec100 = 4,75 min100
4,45 min60 = 4 min60 + 45/60 min60 = 4 min60 + 3/4 min60 " gesprochen: „vier Dreiviertel
Minuten“ " 1 min = 60 sec Durch die Erweiterung von 25 in Zähler und Nenner wird
sozusagen klammheimlich die Umwandlung von 60 Sekunden auf 100 Sekunden pro
Minute vorgenommen: = 4 min100 + ( 3 * 25 ) /
( 4 * 25 ) min100 = 4 min100 + 0,75 min100 = 4,75 min100
" gesprochen: „vier Dreiviertel
Minuten“ " 1 min = 100 sec 4,75 min100
= 4 min100 + 75/100
min100 = 4 min100 + 75/100 * 1 min100 = 4 min100
+ 0,75 * 1 min100 = 4 min60 + 0,75 * 0,6 min60 = 4
min60 + 0,45 min60 = 4 min60 : 45 sec60 = 4,45 min60
Wenn man die nackten
Zahlenwerte 4,45 Minuten und 4,75 Minuten miteinander vergleicht, dann kann
es sich bei dem Wert 4,75 nicht um einen Wert mit sechzigstel Minuten
Unterteilung handeln, da der Dezimalwert 75 bereits einen Überlauf bei den
sechzigstel Minuten zur Folge hätte: 4,75 min60 = 5,15 min60.
Demzufolge kann der
Wert 4,75 durchaus als Unterteilung mit hundertstel Minuten verstanden
werden: 4,75 = 4,75 min100 = 4 min100 + 75/100 min100.
Und umgekehrt kann der kleinere Wert 4,45 als Unterteilung mit sechzigstel Minuten
aufgefasst werden: 4,45 = 4,45 min60 = 4 min60 + 45/60
min60 = 4 min60 + 3/4 min60. Wenn also zu der Zeit
von 4 Minuten und 45 Sekunden (= 4,45 min60) insgesamt 30 Sekunden
addiert werden sollen, dann folgt entsprechend der Unterteilung mit sechzigstel
Minuten: 4,45 min60 + 30 sec = 4,45 min60 + 30 * 1 sec60 = 4,45
min60 + 30 * 1/60
min60 = 4,45 min60 + 30/60 min60 Die
nachfolgende Umrechnung ist mathematisch
korrekt, aber zeitmäßig falsch: = 4,45 min60
+ 1/2 min60
¹ 4,45 min60
+ 0,5 min100
= 4,95 min60 ý = 5,35 min60 ý " FALSCH! Die
nachfolgende Umrechnung ist mathematisch
und zeitmäßig richtig: = 4,45 min60
+ 1/2 min60
= 4,45 min60 + 30
sec60 = 5,15 min60 þ " RICHTIG! 30 sec60 = 0,5 * min100 " 30 sec60 = 50 sec100 = 50 / 100 * 60
sec60 = 30
sec60 5,15 min60 = 5 min60+
0,15 * 1 min60
= 5 min60+ 0,15 * 1,667
min100 = 5 min60+ 0,25005 min100 ≈ 5,25 min100 4,45
min60 + 30 sec = 4 min60 + 45/60 * 100 min100 + 30/60 * 100 sec100 = 4 min60 + 75 min100 + 50 sec100 = 4,75 min100 + 0,50 min100 = 5,25 min100 Interessant,
aber auch gleichzeitig trivial (= alltäglich, gewöhnlich) ist, dass sich beide
Ergebniswerte 4,75 min60
= 5,15 min60 jeweils in
hundertstel Minuten wie folgt umrechnen lassen: 5,15 min60 = 5 min60 +
0,15 * 1 min60
= 5 min60 + 0,15 * 1,667 min100 ≈ 5,25 min100 4,75 min60 = 4 min60
+ 0,75 * 1 min60 = 4 min60
+ 0,75 * 1,667
min100 ≈ 5,25 min100
Mit dem Programm des Projektes „proxi-roboter-p-26“
lässt sich der vorgegebene Zeitstempel = 5,25005 min100 problemlos in 5,25005
min100 = 5 min100
+ 0,25005 * 1 min100
= 5 min100 + 0,25005
* 0,6 min60 = 5 min100 + 0,15003 min60
= 5,15003 min60 umrechnen. Damit man nicht warten
muss bis die Zeit des Zeitstempel = 5,25005 min100 erreicht ist, wurde
diese bereits mit dem Statement
ins Programm und zwar in die beiden Funktionen
aufgenommen. Um den vorgegebenen Zeitstempel = 5,25005 min100 von hundertstel in
sechzigstel Minuten (= 5,15003 min60) umrechnen zu lassen, muss
man nach dem Programmstart nur den
Taster „Knopf A“ drücken.
Mit dem Programm
des Projektes „proxi-roboter-p-27“
lässt sich die Zeitdauer des vorgegebenen
Zeitstempels = 5,25005 min100 nicht nur von hundertstel in sechzigstel
Minuten = 5,15003 min60
umrechnen, sondern auch wie bei einer Stoppuhr
messen! Dabei beginnt die Zeitmessung automatisch in dem Moment wo das Statement <setze dummy_Zeit auf Laufzeit (ms)> (siehe grüner Kasten) ausgeführt wird:
(Zum Vergrößern bitte
auf das Bild klicken!)
Wenn man also die Zeitmessung mittels einer separaten Stoppuhr oder wie im vorliegenden Fall mittels eines Zeitgebers überprüfen will, dann muss man diesen
genau in dem Moment starten, wenn das Symbol
des Häkchens „P“ nach der Pause von einer Sekunde in
der LED-Anzeige des „micro:bit“-Rechners gelöscht wird!
Wie allgemein bekannt sein dürfte, liefert Windows standardmäßig von Haus aus
eine multifunktionale Uhr mit, die sich als Zeitgeber, Alarm, Stoppuhr und Weltuhr direkt am Windows-PC bzw. auf dem Desktop nutzen lässt. Um die (Windows-) Uhr
zu starten, muss man nur mittels der Maus
in der sogenannten System Tray
auf das Symbol „Windows-Fenster“ In der linken oberen Fensterecke des „Uhr“-Programms klickt man dann auf
das „Menü“-Symbol „ Mittels Mausklick auf den kleinen Stift „ Abschließend klickt man oben rechts im Fenster
auf das Verkleinerungs-Symbol „
(Zum Vergrößern bitte
auf das Bild klicken!) Zusammen mit dem Programm des Projektes „proxi-roboter-p-27“
und dem Zeitgeber sieht das Ganze dann
so aus:
(Zum Vergrößern bitte
auf das Bild klicken!) Vorgehensweise
beim Überprüfen der zu messenden Zeitdauer: 1.
Wie bereits erwähnt wurde, muss zwecks Überprüfens der zu
messenden Zeitdauer von 5 min60 15 sec60 als Erstes das
Projektprogramm „proxi-roboter-p-27“
auf dem „micro:bit“-Rechners gestartet werden! 2.
Nach dem Programmstart muss dann als Zweites der Countdown des Windows-Zeitgebers genau in dem Moment
gestartet werden, wenn das Symbol
des Häkchens „P“ in der LED-Anzeige des „micro:bit“-Rechners verschwindet! Da es im Programm
des Projektes „proxi-roboter-p-27“
jetzt keinen Taster „Knopf A“ mehr gibt, mit dem sich die zu messende Zeitdauer von 5 min60 15 sec60 stoppen ließe, gibt
es stattdessen die <Wenn …
dann>-Abfrage mit dem Statement
(Zum Vergrößern bitte
auf das Bild klicken!) bei der der aktuelle Zeitwert der Variablen
<anzahl_min_100> mit der festgelegten
Stoppzeit von 5.25005 min100 = 5,15003 min60 verglichen wird.
Sobald die festgelegte Stoppzeit von 5.25005 min100 überschritten
wurde, erfolgt die Auswertung und
Anzeige der gemessenen Stoppzeit mittels der drei
Funktionen (siehe weiter unten im roten Kasten):
(Zum Vergrößern bitte
auf das Bild klicken!) Damit dem Anwender bei der fünfminütigen
Messung nicht langweilig wird, wird zu jeder ganzzahligen, d.h. vollen
Minute, die bereits verstrichene
Zeit in der LED-Laufschrift
des „micro:bit“-Rechners angezeigt. Dabei werden aber die bereits
verstrichenen, vollen Minuten nicht extra
berechnet, sondern einfach nur mittels der Variablen <loop_n> (= Schleifenzähler n)
durchgezählt und ganzzahlig angezeigt (siehe weiter unten im grünen
Kasten):
(Zum Vergrößern bitte
auf das Bild klicken!) Zu guter Letzt wird im blauen
Kasten
mit dem Statement
fortwährend ein sich wegen der Laufschriftanzeige von rechts nach
links bewegender „Fortschrittsbalken“ angezeigt, um dem
Anwender zu signalisieren, dass das Programm
des Projektes „proxi-roboter-p-27“
still im Hintergrund vor sich hin werkelt und der kleine „micro:bit“-Rechner nicht
zwischenzeitlich abgestürzt ist. Dabei ist der Programmkode im blauen Kasten Bestandteil der <wenn … dann>- oder <ansonsten>-Abfrage:
(Zum Vergrößern bitte
auf die Einzelbilder klicken!) Immer dann, wenn es im grünen
Kasten
nichts zu tun gibt, d.h. wenn es keine bereits verstrichenen, vollen Minuten anzuzeigen gibt, wird im blauen
Kasten
der sich von rechts nach links bewegende „Fortschrittsbalken“ angezeigt (siehe oben). Wie man anhand des nachfolgenden Quellkodes
sieht, wurden die Ausgabe- und Anzeige-Statements der hundertstel und sechzigstel Minuten
(Zum Vergrößern bitte
auf die einzelnen Bilder klicken!) in die Funktion
ausgelagert, sodass sich die Lesbarkeit des Programms weiter
verbessert:
(Zum Vergrößern bitte
auf das Bild klicken!) Beim bisherigen Programm des Projektes „proxi-roboter-p-27“ verhält es sich so,
dass man die Zeitdauer des Zeitstempels = 5,25005 min100 für den Countdown, d.h. das Herunterzählen,
händisch in den Programmkode des Programms einpflegen musste:
(Zum Vergrößern bitte
auf das Bild klicken!) Elektronische Wecker, Alarmgeber, Stoppuhren
oder Zeitschaltuhren wie z.B. beim Backofen verfügen zwecks der Einstellung
der aktuellen Uhrzeit oder der Zeitdauer der Gar- bzw.
Backzeit oftmals nur über zwei Tasten
und zwar über eine „Minus“-Taste („-“) zum Abwärtszählen und eine „Plus“-Taste
(„+“) zum Heraufzählen der einzustellenden Zeitdauer:
(Zum Vergrößern bitte
auf das Bild klicken!) Bei der Bedienung
der beiden „Plus“- und „Minus“-Tasten verhält es sich zweckmäßigerweise so, dass
die einzustellende Zeitdauer umso schneller
im Display durchläuft, je länger
man eine der beiden Tasten gedrückt hält.
Demzufolge wird die einzustellende Zeitdauer erst ganz langsam in einzelnen Minuten hoch gezählt und
wird dann immer schneller, je länger man eine der beiden Tasten gedrückt hält, sodass die Stunden am
Ende nur so durch das Display rasen. Sobald man aber eine der jeweiligen
Tasten loslässt, stoppt die angezeigt Zeitdauer und fängt beim erneuten Drücken einer der Tasten wieder
ganz langsam an zu zählen (siehe YouTube-Video). Nachfolgend geht es aber erst einmal darum,
die Eingabe der Zeitdauer des Zeitstempels für den Countdown mittels der beiden Tasten
<Knopf A> und <Knopf B> zu programmieren, um
dann zu sehen, ob und wie sich die Funktion der Zeitschaltuhr des Backofens
nachprogrammieren lässt. Beim Programm
des Projektes „proxi-roboter-p-28“
handelt es sich erstmals um ein richtiges „Stoppuhr“-Programm, das sich mit den
beiden Tastern <Knopf A> und <Knopf B> bedienen lässt. Dabei
dient die Taste <Knopf A> dazu, die Stoppuhr zu starten („|>“) und mit der Taste <Knopf B> zu beenden („>|“):
(Zum Vergrößern bitte
auf das Bild klicken!) Das Besondere an dem Programm des Projektes „proxi-roboter-p-28“ ist,
dass die beiden Taster <Knopf A> und <Knopf B> wider Erwarten nicht
die „Start“- und „Stopp“-Funktion direkt
veranlassen und ausführen, sondern nur einen Umschalter in Form der booleschen Variablen <start_stopp_Timer_boolean>, der von „wahr“, engl. „true“, auf „falsch“, engl. „false“ und umgekehrt hin und her
geschaltet wird. Demzufolge gibt es immer nur ein „Entweder“
oder ein „Oder“, d.h. <wenn … dann>- oder <ansonsten>-Abfrage, aber niemals ein „Und“
(siehe grüner Kasten):
(Zum Vergrößern bitte
auf das Bild klicken!) Wie man anhand der Wahrheitstabelle im grüner Kasten sieht, muss immer einer
der beiden Taster <Knopf A> oder <Knopf B> gedrückt werden, um
die Stoppuhr zu starten („|>“) oder anzuhalten („>|“). Das Interessante dabei ist noch, dass sich der
eigentliche Wechselschalter aus den beiden Einzelschaltern in Form der beiden Taster <Knopf A> und <Knopf B> zusammensetzt, was sozusagen materialmäßig
eine Ressourcenverschwendung ist. Weil aber die Umschaltlogik mittels der booleschen Variablen <start_stopp_Timer_boolean> etwas komplex ist und das Umschalten der Stoppuhr von Start („|>“) zu Anhalten („>|“) indirekt
erfolgt, macht es Sinn, das Umschalten
der Stoppuhr mit den einzelnen Tastern <Knopf A> oder <Knopf B> vorzunehmen, weil man dann sofort sieht, ob
das Ganze funktioniert oder nicht. Wir hatten ja schon mal die Rede von der
sogenannten Treppenhausbeleuchtung
mittels Wechselschalter,
wo man das Treppenhauslicht mit dem Schalter A einschalten und am anderen Ende mit
dem Schalter B wieder ausschalten
kann. Dabei erkennt man Wechselschalter daran, dass sich der Wippschalter entweder in der einen Wipp-Position befindet oder in der
anderen, sodass sich anhand der Wipp-Position von außen nicht feststellen
lässt, ob sich der Wippschalter im eingeschalteten oder ausgeschalteten Zustand befindet! Und, da die Treppenhauslampen der Treppenhausbeleuchtung
immer nur einphasig geschaltet werden, kann eine ausgeschaltete
Treppenhauslampe trotzdem unter „Strom“ stehen, nämlich dann, wenn zufälliger Weise
die stromführende braune Phase L1 nicht ausgeschaltet/getrennt wird,
sondern nur der nicht Strom führende blaue
Neutralleiter N für den Stromrückfluss! Moderne Wohnungsflur- oder
Treppenhausbeleuchtungen arbeiten aber heutzutage nur noch mit einem
sogenannten Stromstoßrelais
bei denen auf den Wohnetagen und im Treppenhaus stets nur Niedervolt-Taster
für die Steuerung, d.h. das Ein- oder Ausschalten der Beleuchtung
verbaut werden. Jetzt kennen wir auch den Unterschied zwischen
einem Schalter und einem Taster! Ein (Ein-/Aus-) Schalter schaltet bzw. unterbricht immer selbst den
Stromfluss zur Glühlampe,
während ein Taster den Stromfluss zur Glühlampe immer nur indirekt
über das Stromstoßrelais steuert! Wenn man also die Arbeits- und Funktionsweise nebst Algorithmus des
Programms beim Projekt „proxi-roboter-p-28“ verstanden hat, dann lässt sich dieses auch
so programmieren, dass man für die Stoppuhr,
d.h. für das Starten und Stoppen der Stoppzeit,
nur noch einen Taster benötigt (siehe Projekt „proxi-roboter-p-29“):
(Zum Vergrößern bitte
auf das Bild klicken!) Wie man im obenstehenden „MakeCode“-Programmkode sieht, arbeitet der Taster <Knopf
B>
sowohl zum Starten als auch zum Stoppen der Stoppuhr,
eben weil sich der Taster <Knopf B> mit jedem Knopfdruck umschalten lässt! Leider eignet sich das Programm des Projektes „proxi-roboter-p-29“
noch nicht dazu, um festzustellen zu können wie lange der Taster <Knopf B> gedrückt wurde, da sich dieser immer erst dann wieder erneut drücken
lässt, wenn die Laufschriftanzeige in der LED-Laufschrift durchgelaufen ist: 1.
Laufschriftanzeige „|>“ohne weitere Anzeige zwecks Mitteilung,
dass die Stoppuhr gestartet
wurde. 2.
Laufschriftanzeige „>|“ mit Auswertung
und Anzeige der gestoppten Zeitdauer zwecks Mitteilung,
dass die Stoppuhr angehalten
wurde. Aber immerhin wissen wir jetzt, dass sich die LED-Laufschriftanzeige wider Erwarten nicht
durch Tastendruck auf den Taster <Knopf B> unterbrechen lässt. Damit durch das Drücken des Tasters <Knopf B> sofort die Startzeit zum Zeitpunkt des Tastendrucks erfasst wird, positionieren wir das Statement <setze startzeit_Timer auf Laufzeit (ms)> direkt an den Anfang
der Funktion <erfassen_Startzeit>. Um das bisherige Programm des Projektes „proxi-roboter-p-29“
schneller zu machen, entfernen wir in diesem das Statement <zeige
Text „ |> “>
und ersetzen dieses durch das Statement
<pausiere (ms) 100“>, sodass sich jetzt
mit dem Programm des Projektes „proxi-roboter-p-30“ Stoppzeiten größer 100 ms
( > 0,010 s) zwischen dem ersten und zweiten Tastendruck des Tasters <Knopf
B>
stoppen lassen:
(Links: Projekt „proxi-roboter-p-29“ |
Rechts: Projekt „proxi-roboter-p-30“) (Zum Vergrößern bitte
auf die Bilder klicken!) Zum Vergleich: Junge Leute, die mit 18 Jahren
den PKW-Führerschein machen erreichen eine Reaktionszeit von um die 25/100 s
= 0,25 s = 25 ms.
Der Grund dafür dürfte der sein, dass mit der Systemvariablen <Laufzeit (ms)> der Prozessortakt
abgefragt wird. Und zwar mittels eines sogenannten Interrupts,
d.h. einer kurzzeitigen Unterbrechung des laufenden Programms. Damit der Prozessor
nach dem Interrupt wieder mit dem
laufenden Programm fortfahren
kann, muss intern die zuvor gesetzte Sprungmarke
wieder angesprungen werden. Die Wiederaufnahme
des laufenden Programms braucht
aber etwas Zeit, d.h. ein paar Taktzyklen der Rechenzeit
des Prozessors. Wenn man das Statement <pausiere
(ms) 100“>
aus dem Programmkode entfernt,
dann setzt der Prozessor nach der
Abfrage der Systemvariablen <Laufzeit (ms)> wieder seine Arbeit,
d.h. den Programmablauf fort und
zwar wider Erwarten beim vorherigen Statement <wenn Knopf B ist geklickt dann> …<ansonsten> …, sodass ohne erneutes Drücken des Tasters <Knopf B> die bisher verstrichene Zeitdauer beim Ausführen des Interrupts mit tInterrupt = 0,02 s = 20 ms in der Laufschrift angezeigt wird:
(Zum Vergrößern bitte
auf das Bild klicken!) Offensichtlich handelt es sich hier um einen Programmierfehler der „MakeCode“-Programmiersprache von Microsoft oder um
einen Fehler im Betriebssystem
des „micro:bit“-Rechners. Um das herauszufinden, müsste man das
obenstehende „MakeCode“-Programm in einer anderen Programmiersprache wie z.B. Python
nachprogrammieren. Wenn sich in Python
der gleiche Fehler zeigt, dann dürfte es sich tatsächlich um einen Fehler im Betriebssystem
des „micro:bit“-Rechners handeln! Bei dem Programm
des Projektes „proxi-roboter-p-31“
wurde die Anzeige der gestoppten Zeitdauer in die Funktion <anzeigen_Stoppzeit> ausgelagert. Außerdem
werden die gestoppte Start- und Stoppzeit im Array
<zeitdauer_Array> gespeichert:
(Zum Vergrößern bitte
auf das Bild klicken!) Das obenstehende Programm des Projektes „proxi-roboter-p-31“ hat
noch den Nachteil, dass sich mit diesem immer nur jeweils eine Start-Stopp-Messung durchführen lässt,
weil am Ende des Programmkodes der Funktion
<erfassen_Stoppzeit> und der Funktion <anzeigen Stoppzeit> wiederholt das Statement <setze
start_stopp-Timer_boolean auf wahr> gesetzt wird, sodass wieder alles „auf Anfang“ gesetzt
wird und die Zeitmessung beim Drücken des Tasters <Knopf B> von vorne beginnt. In der Praxis hat es sich aber herausgestellt,
dass es oftmals vorteilhaft ist, wenn man die laufende Start-Stopp-Messung durch erneutes
Drücken des Tasters <Knopf B> fortsetzen kann!
Deshalb wurde im nachfolgenden Programm
des Projektes „proxi-roboter-p-32“
das Statement <setze start_stopp-Timer_boolean auf wahr> in den Funktionen <erfassen_Stoppzeit> und <anzeigen Stoppzeit> weggelassen:
(Zum Vergrößern bitte
auf das Bild klicken!) Mit zurzeit 143 DinA4-Seiten im Querformat und
99 Bildern ist es an der Zeit, das Tutorial
über das Kodieren von „MakeCode“-Programmen in einer neuen
Webseite fortzusetzen. [ Hier geht’s dann weiter!
] |
|
||||||||||||||||||||||||||||||
|
|
[ Proxi-Roboter ] [ Seitenanfang ] [ Montage 1 ] [ Coding 2 ] |
|
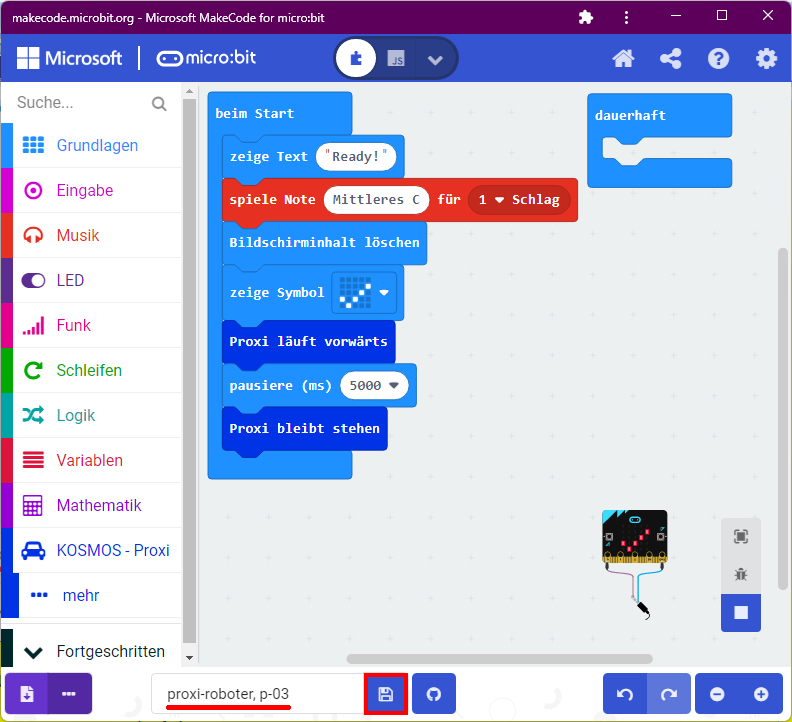
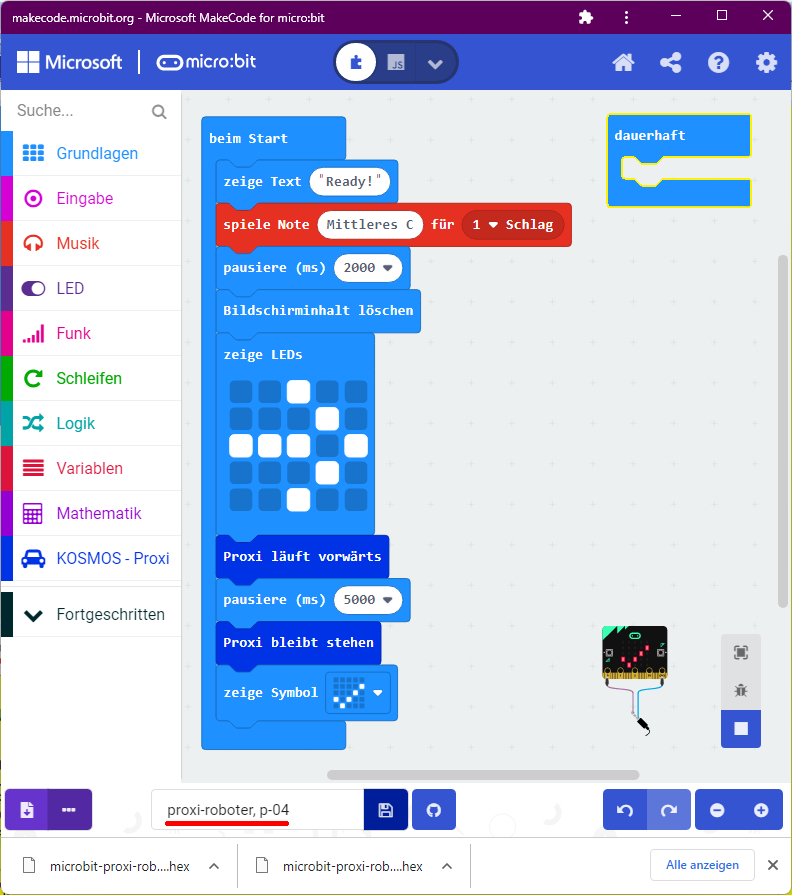
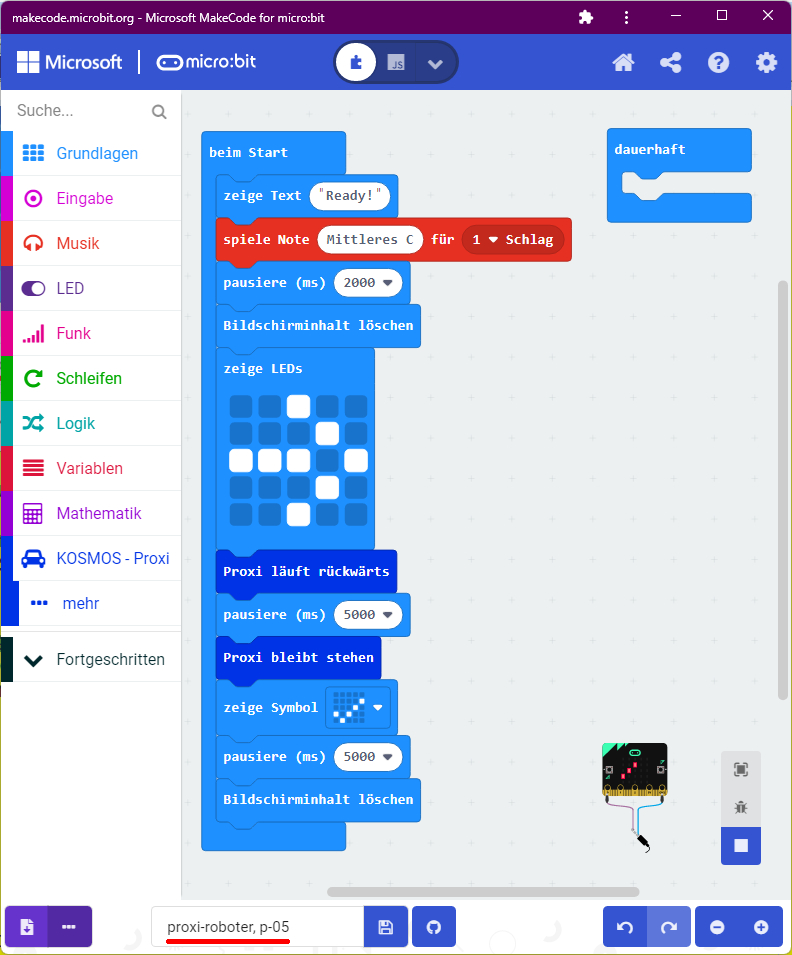
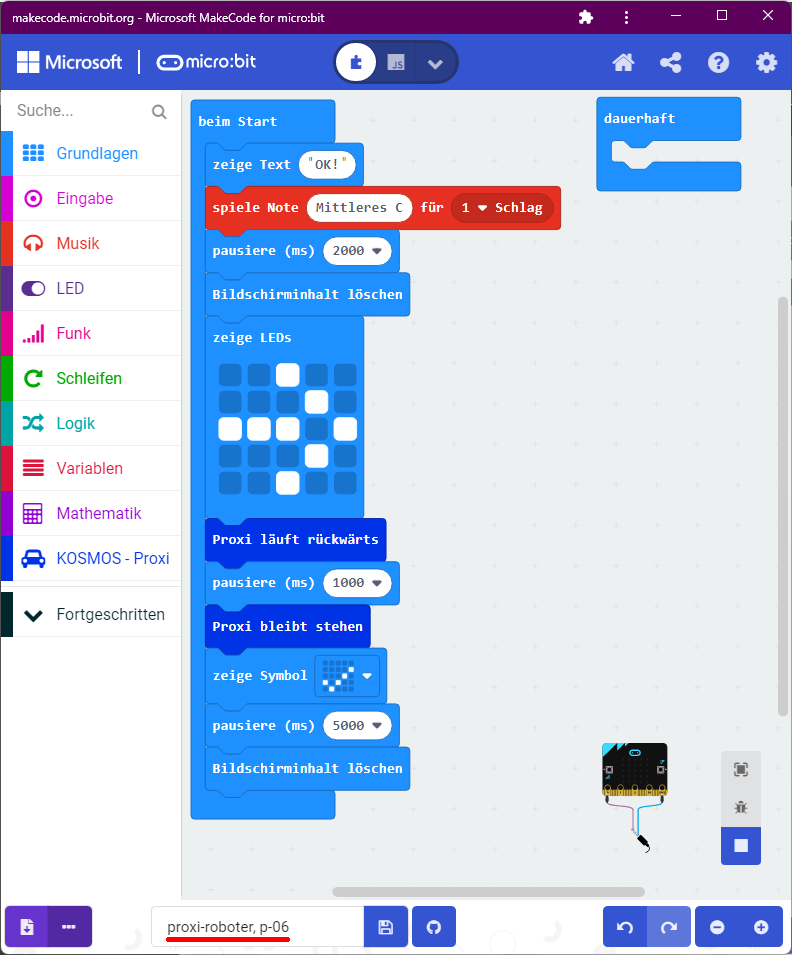
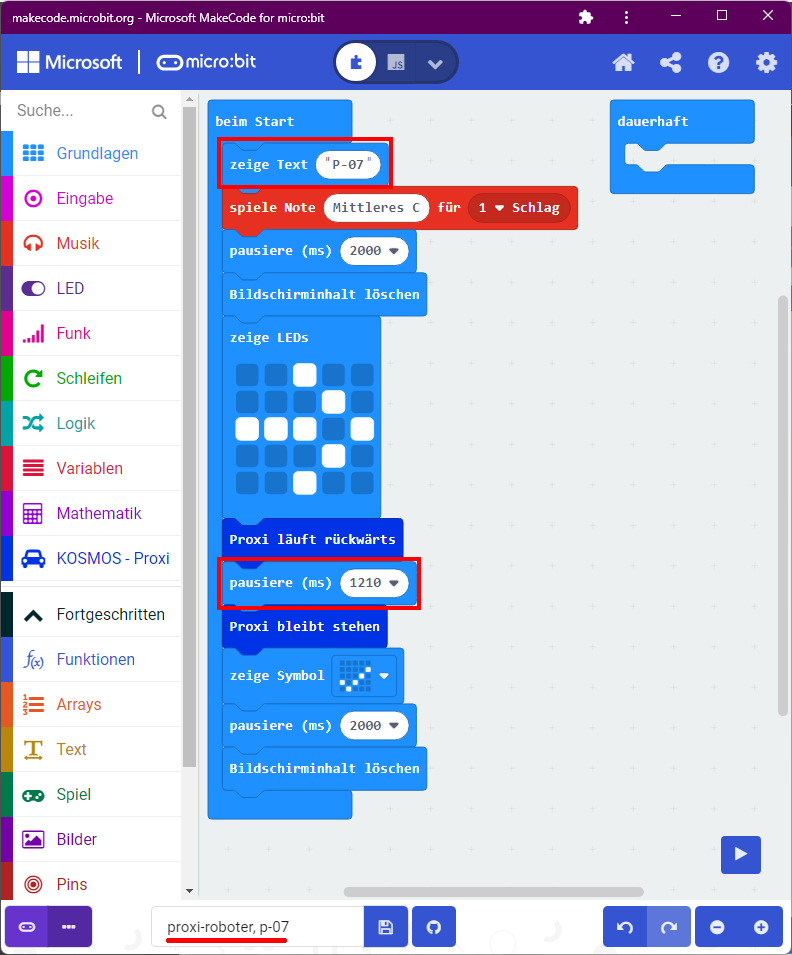

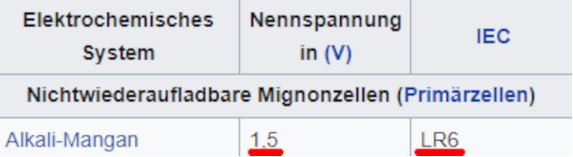
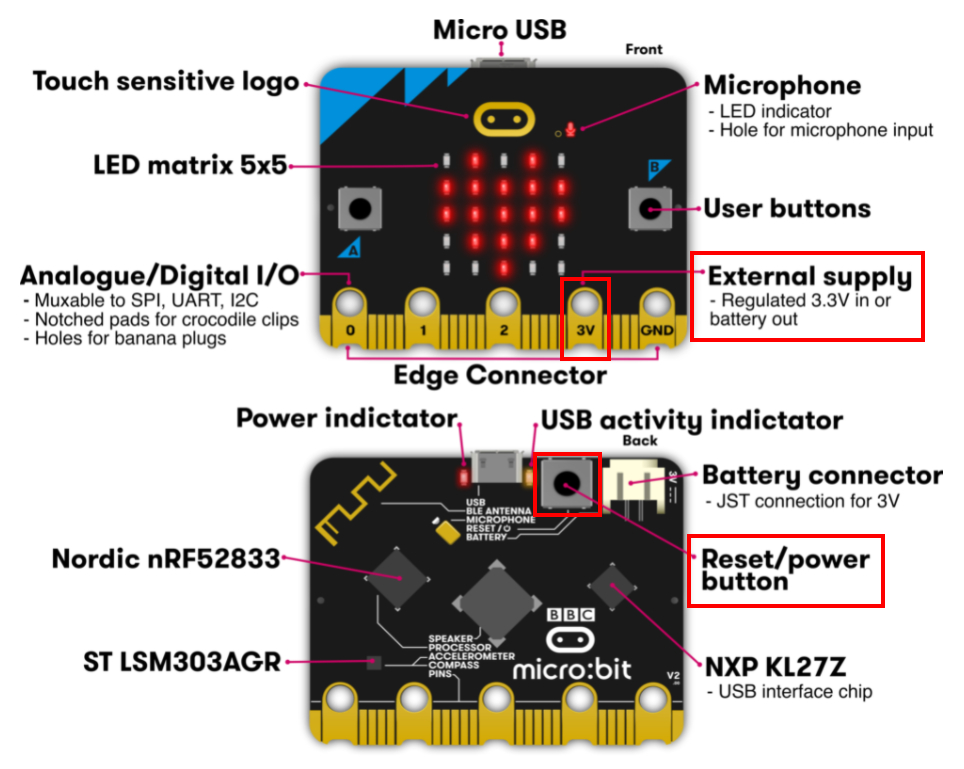



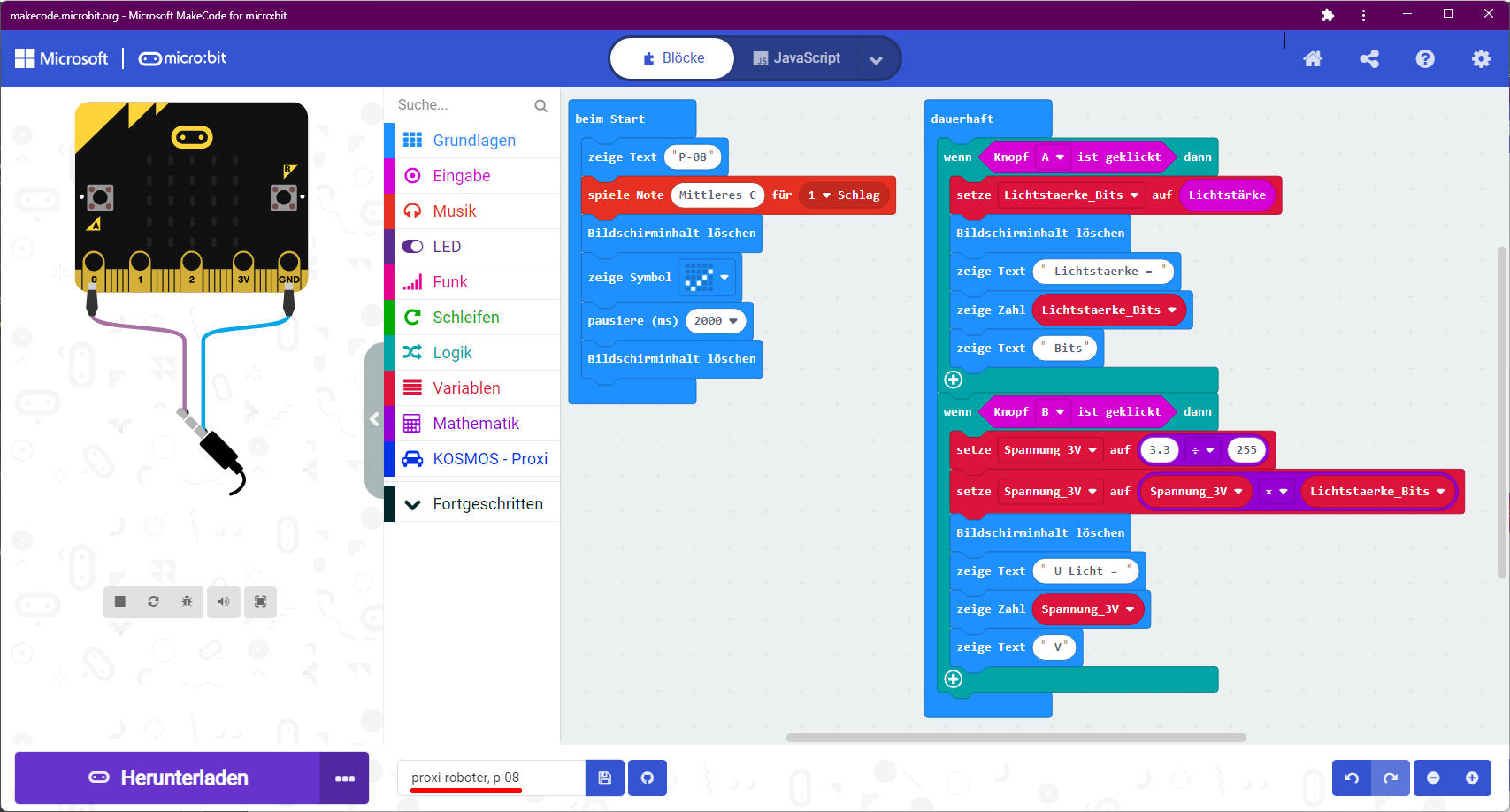
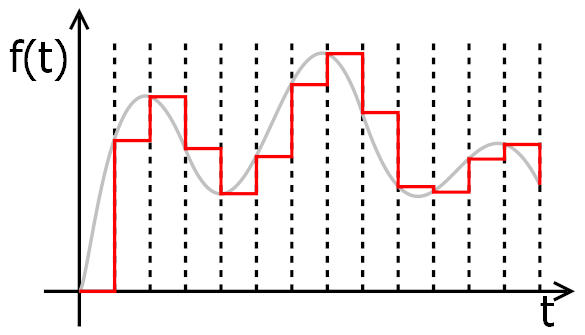
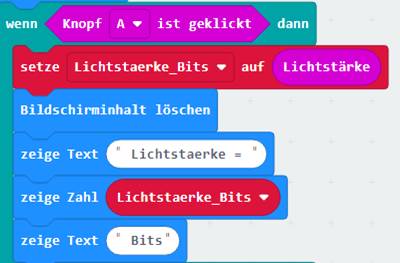


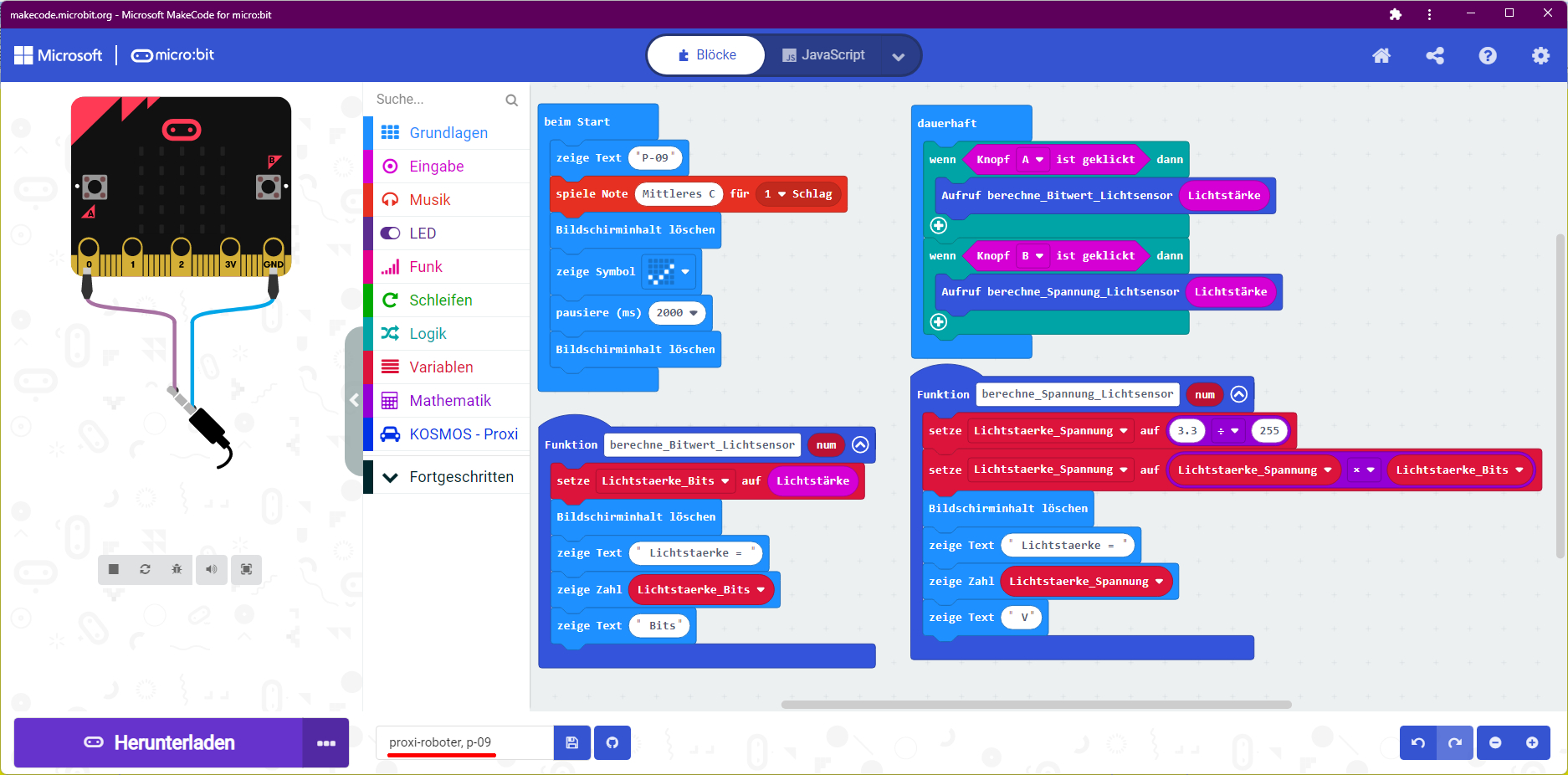


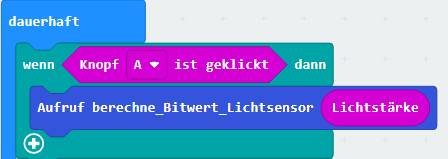
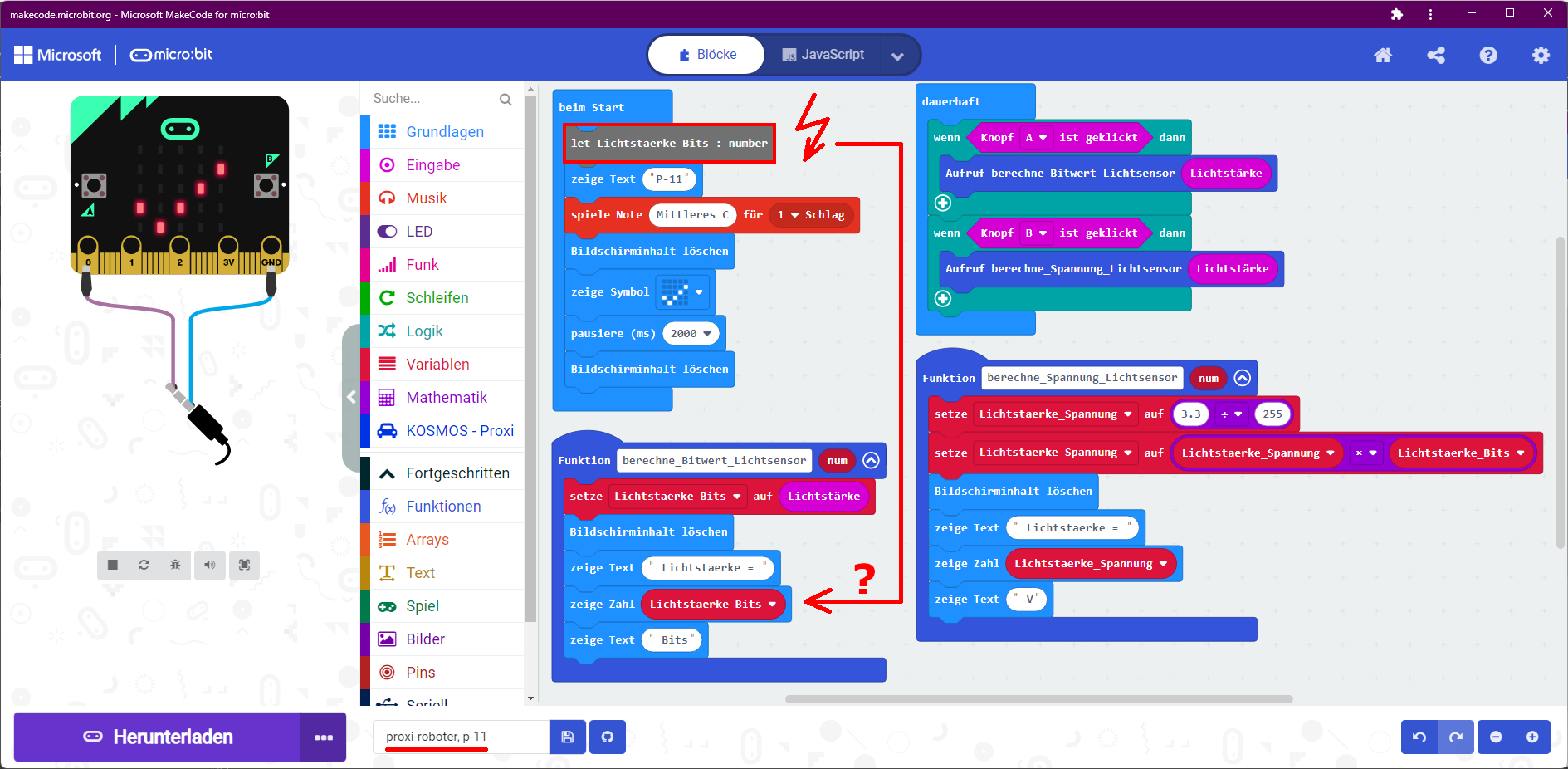
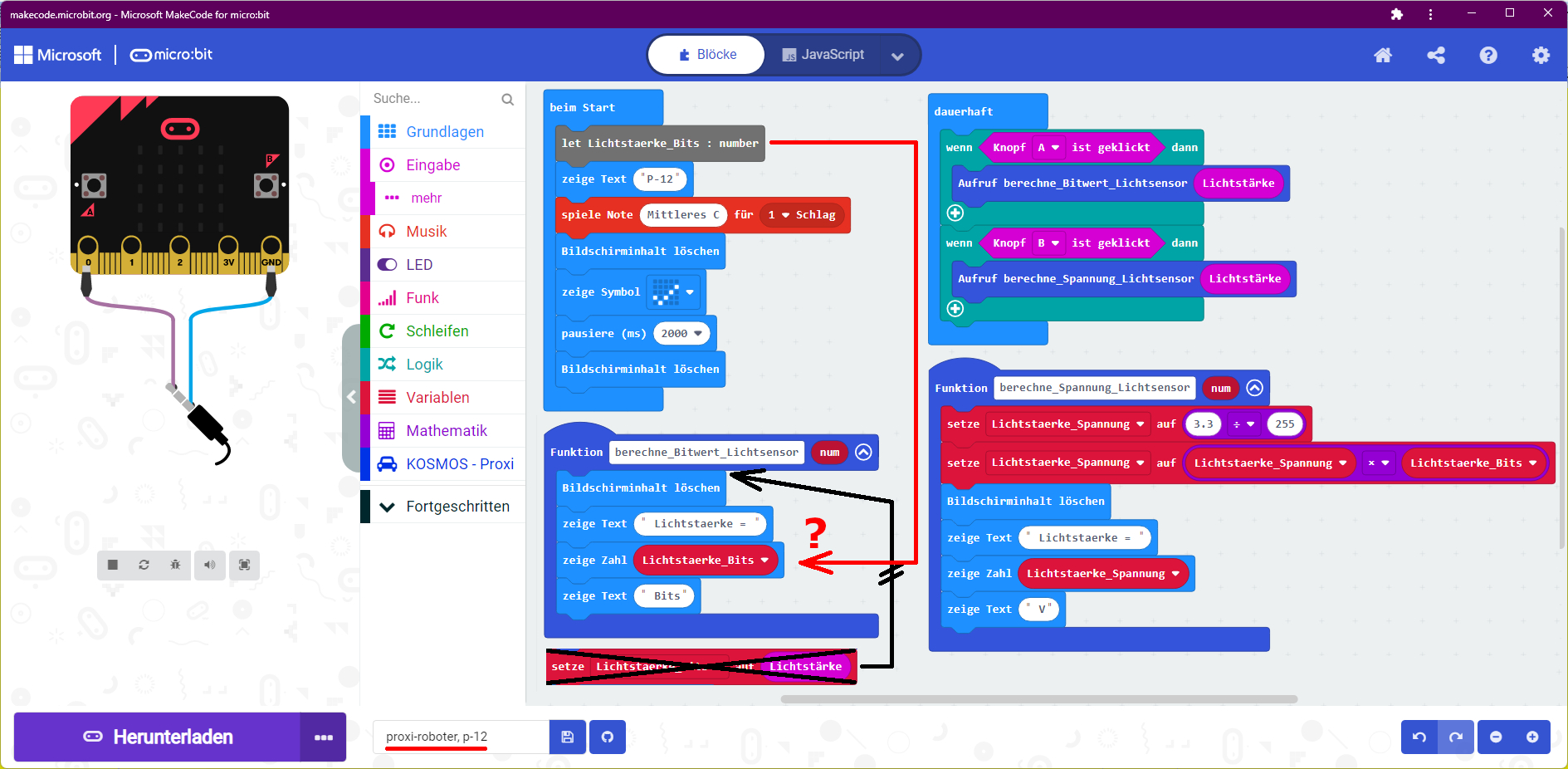
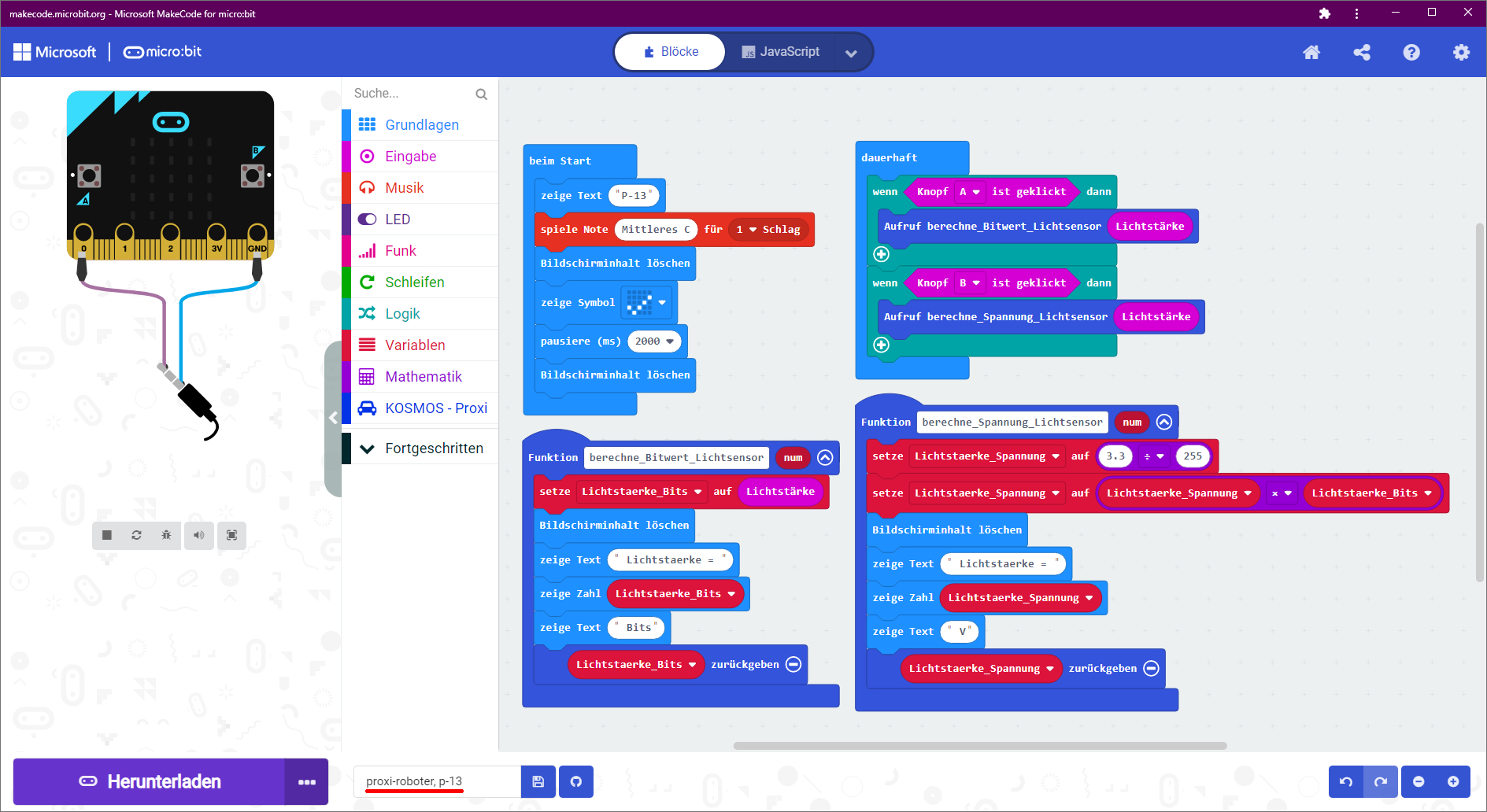
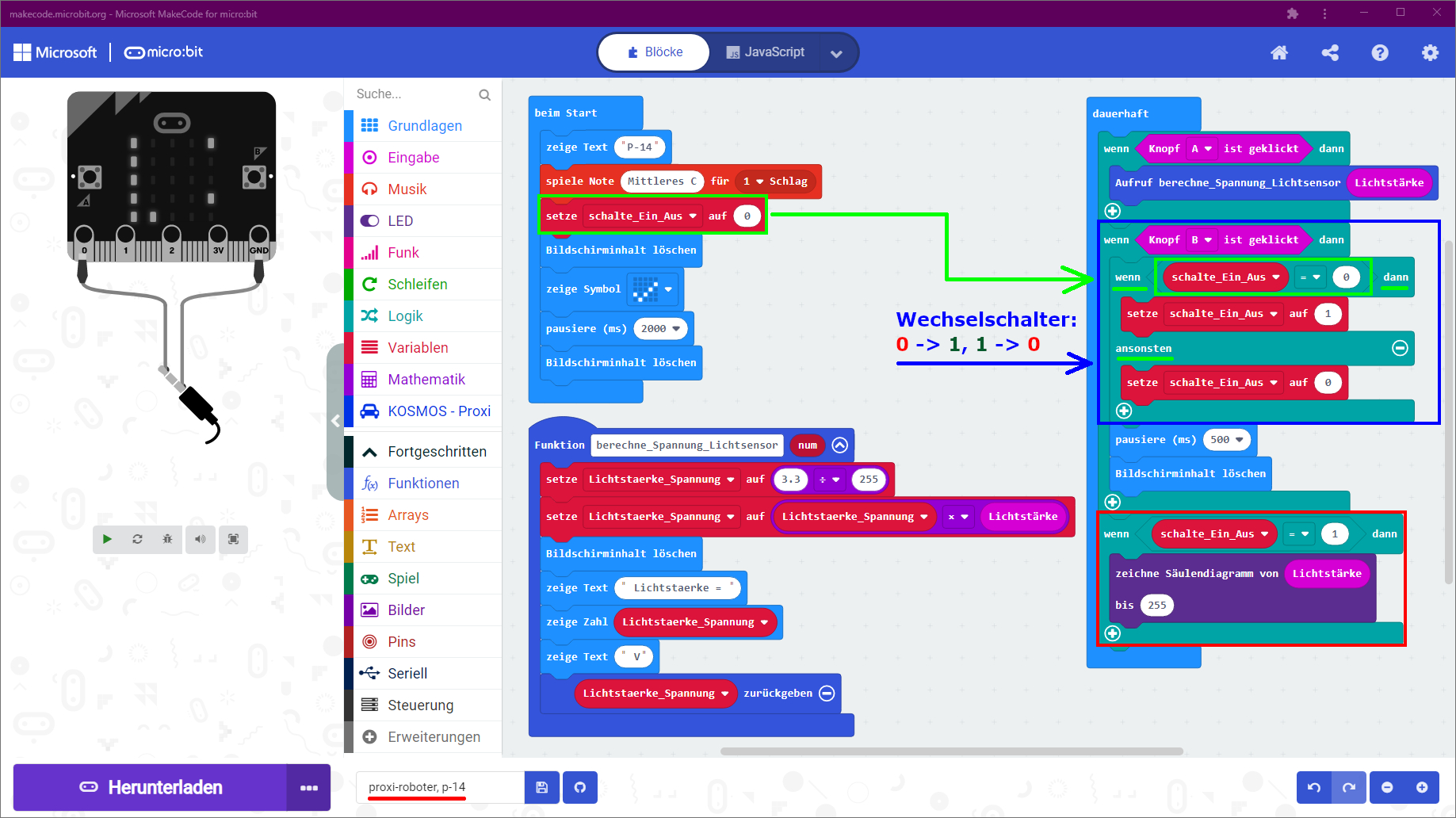

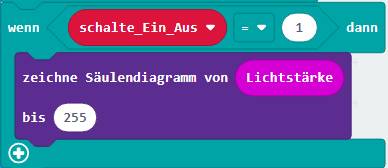
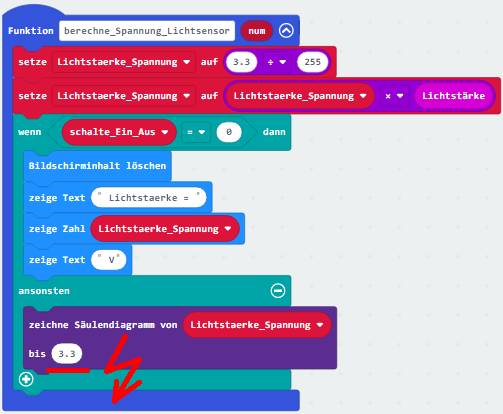
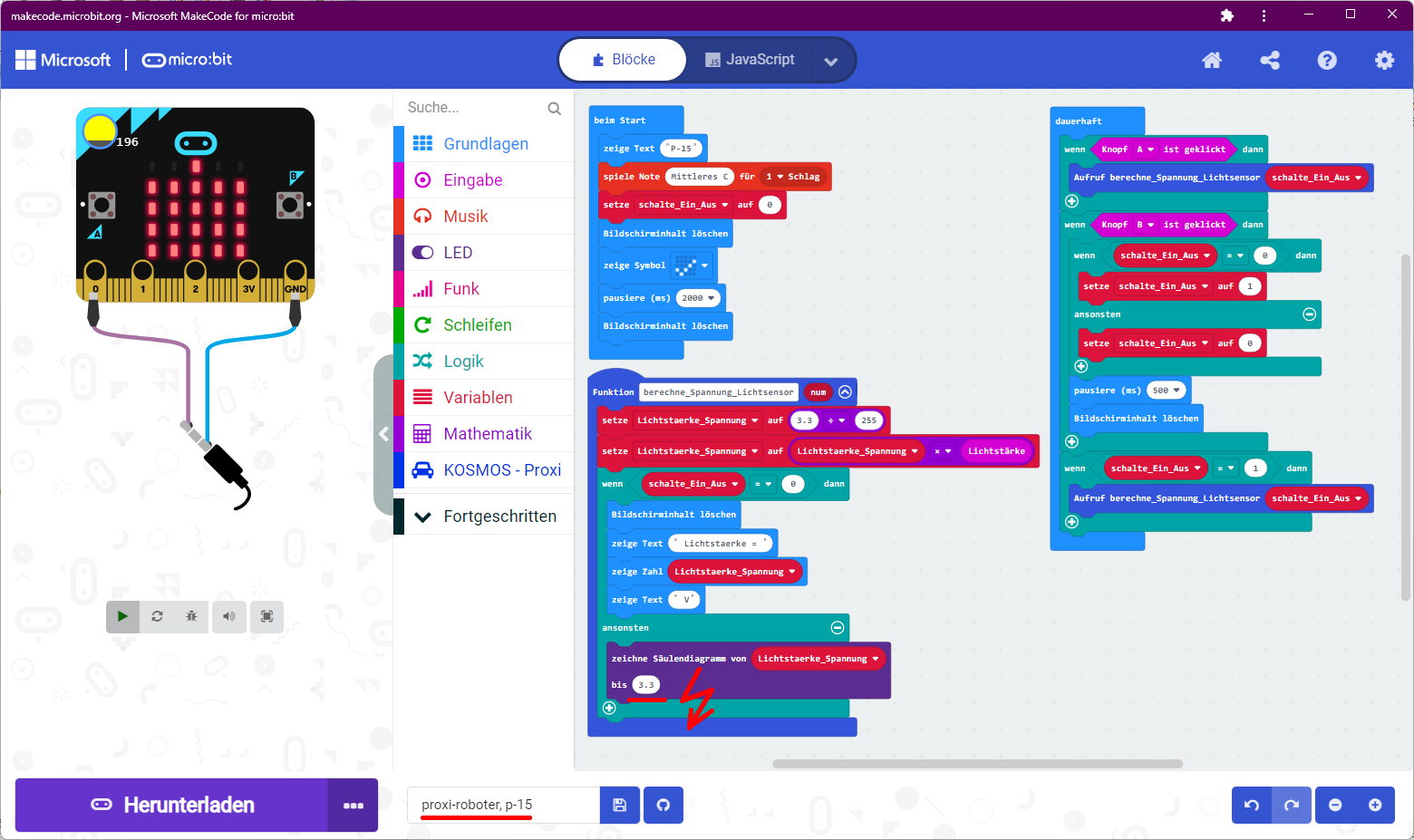

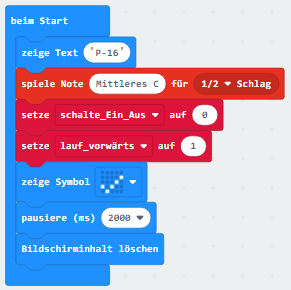

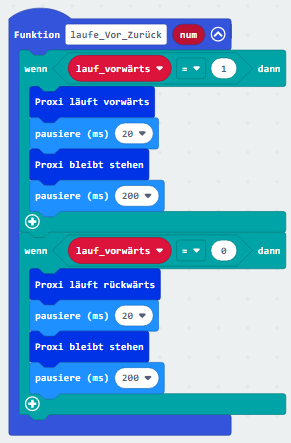
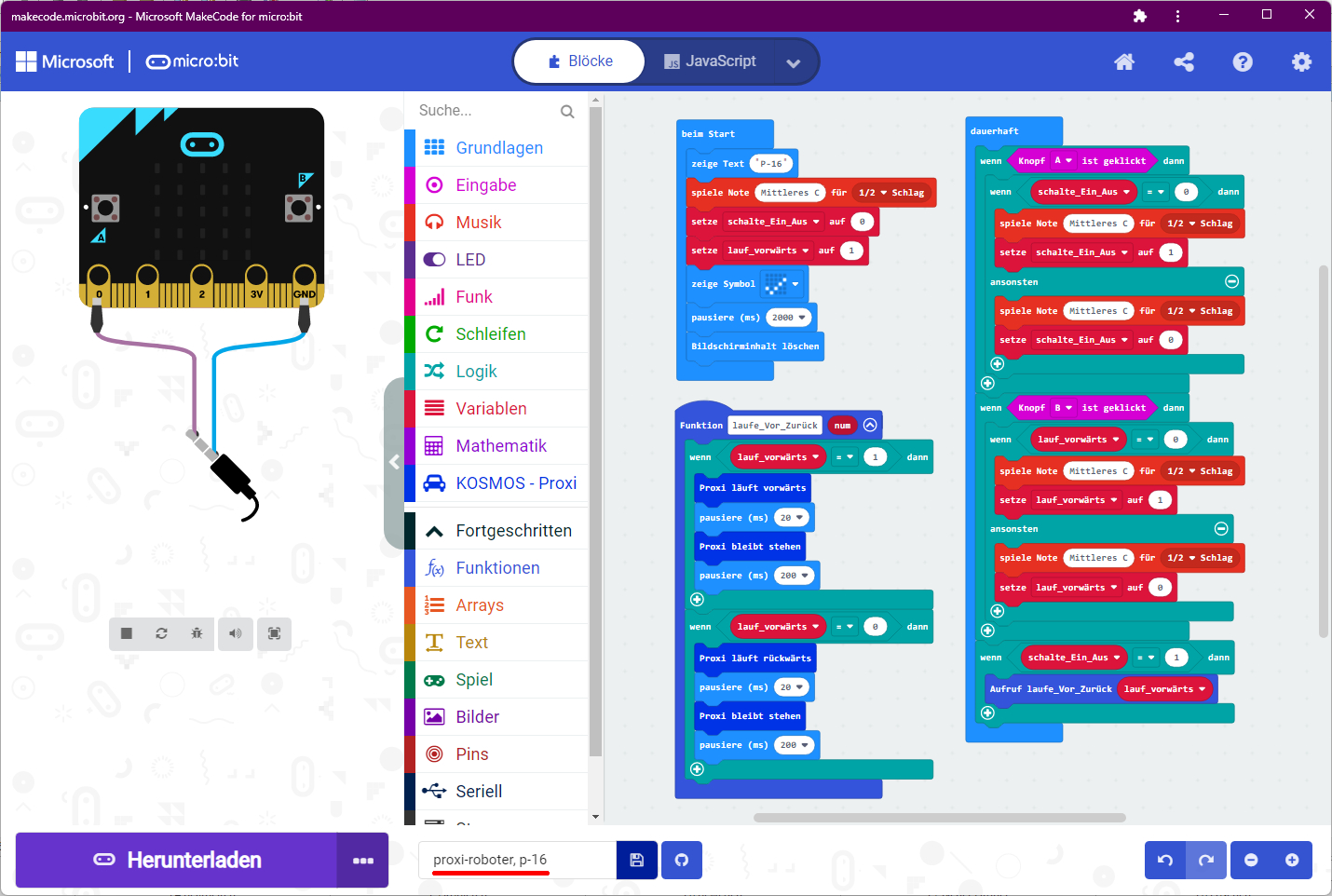
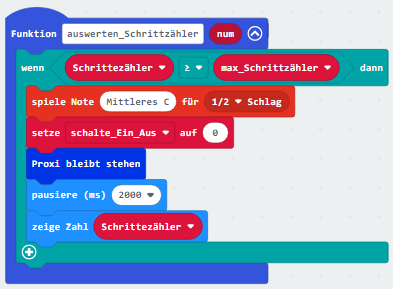
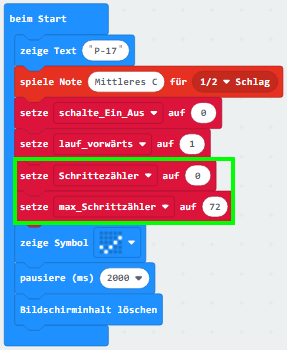

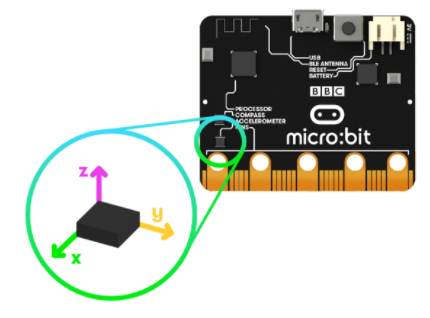

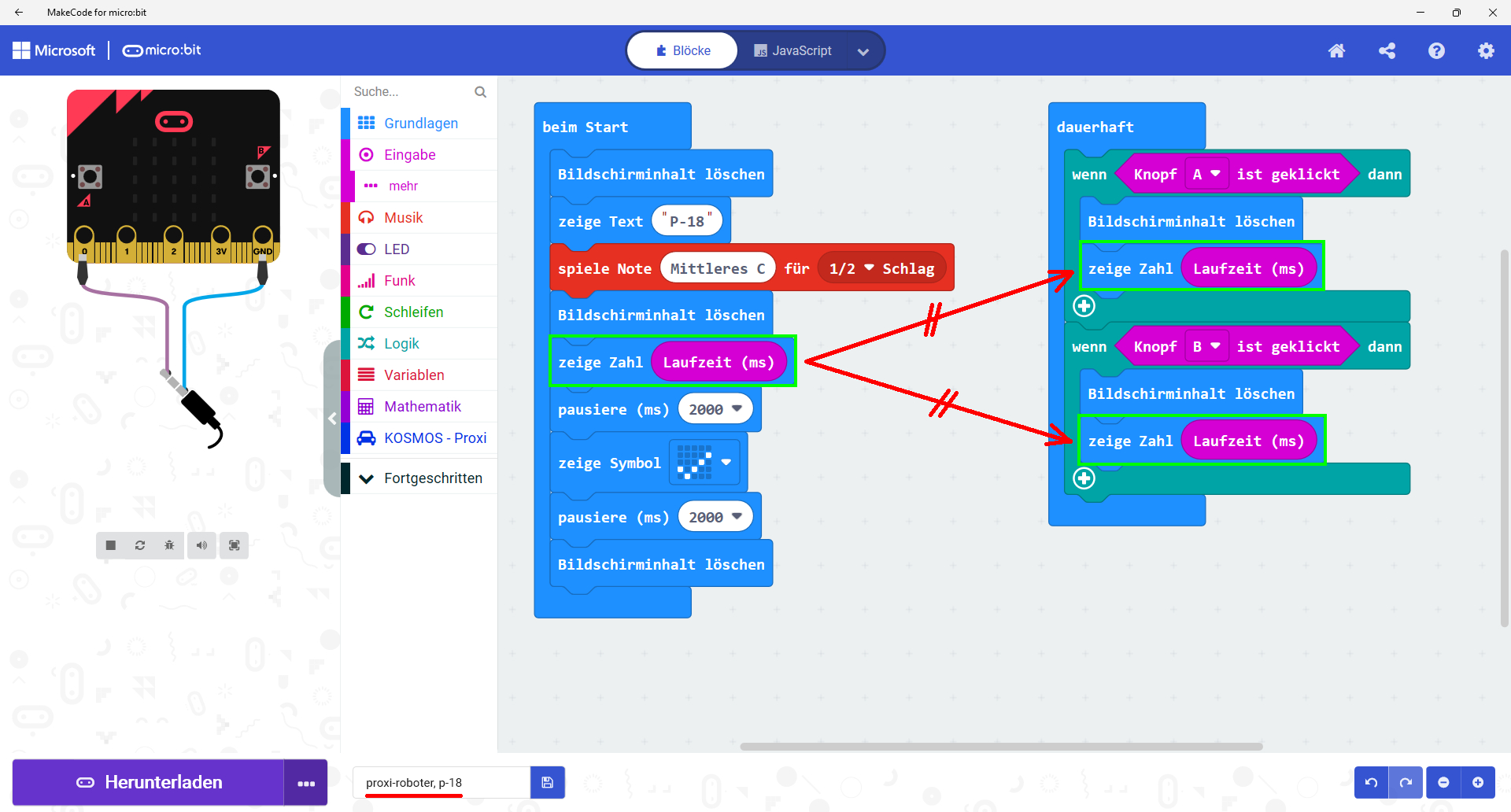
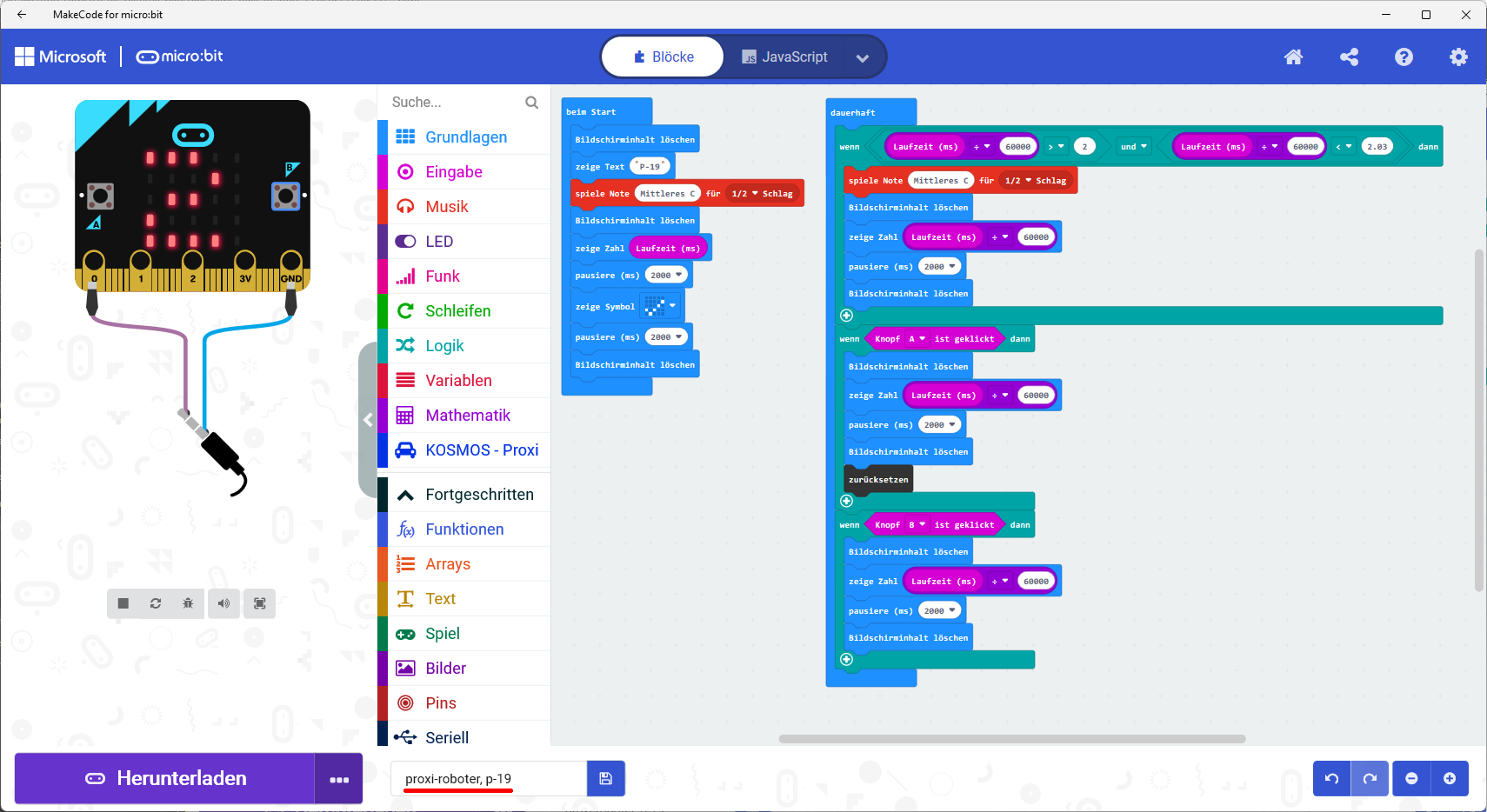
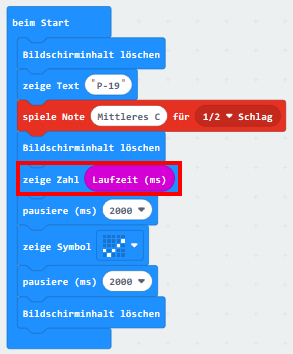
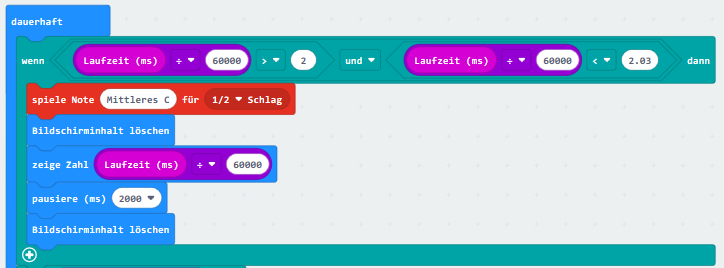
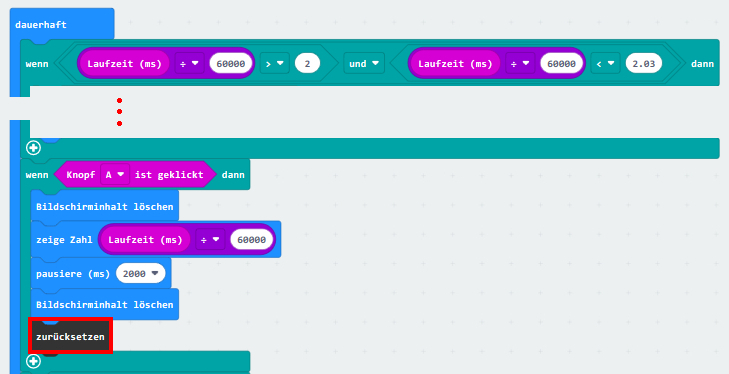
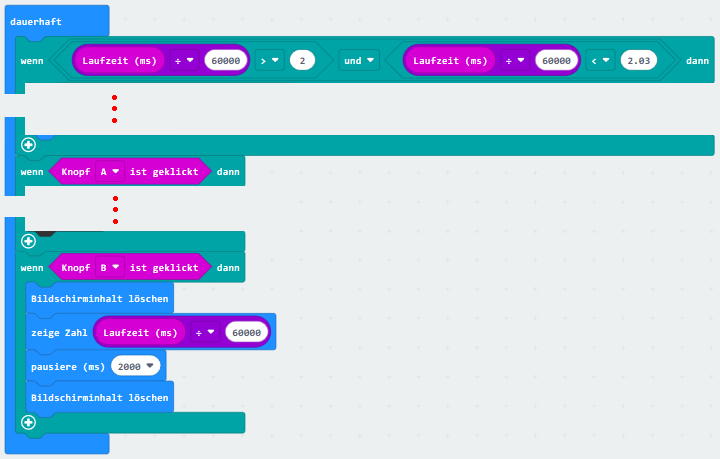
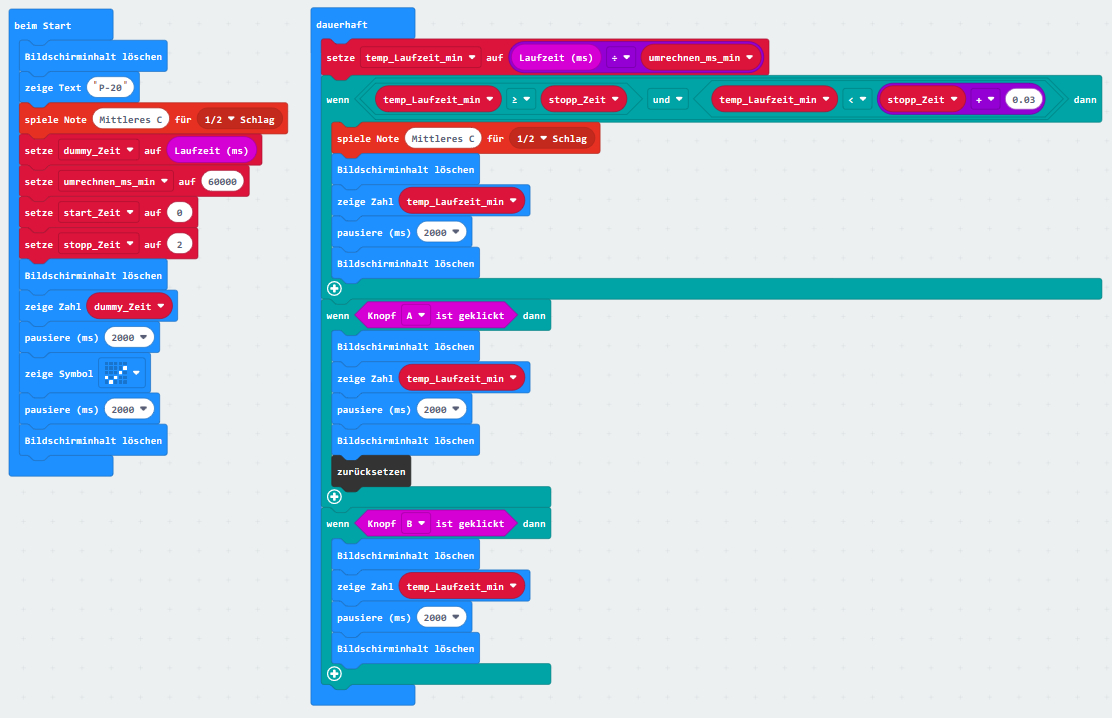

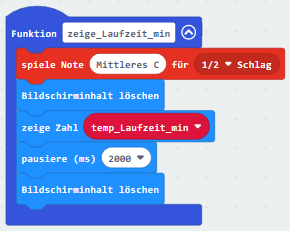
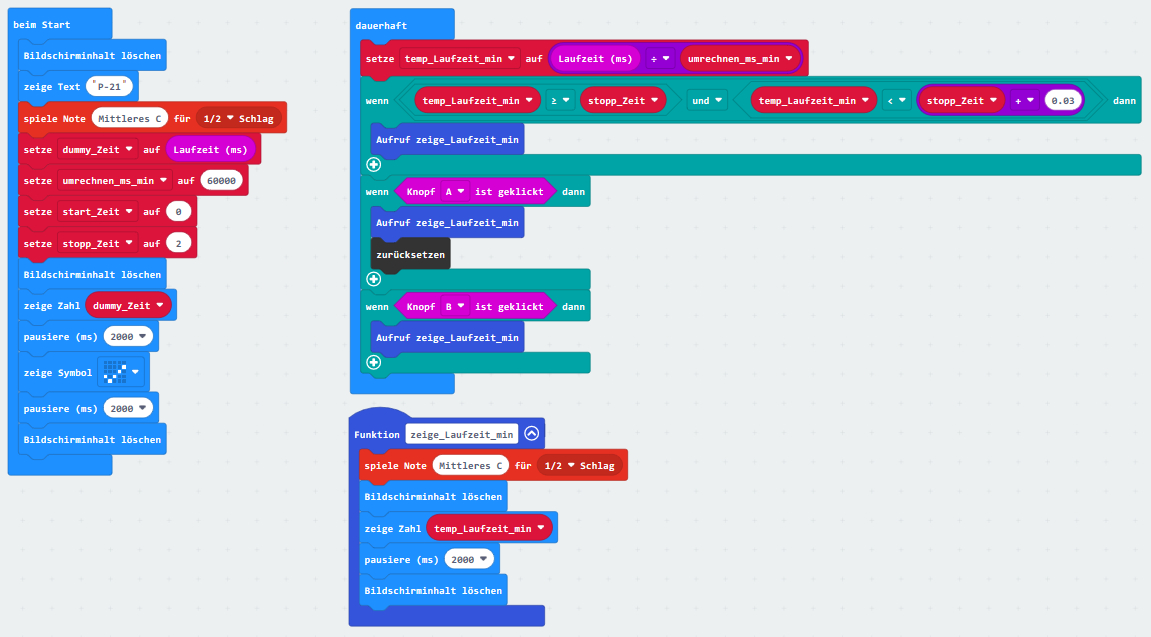
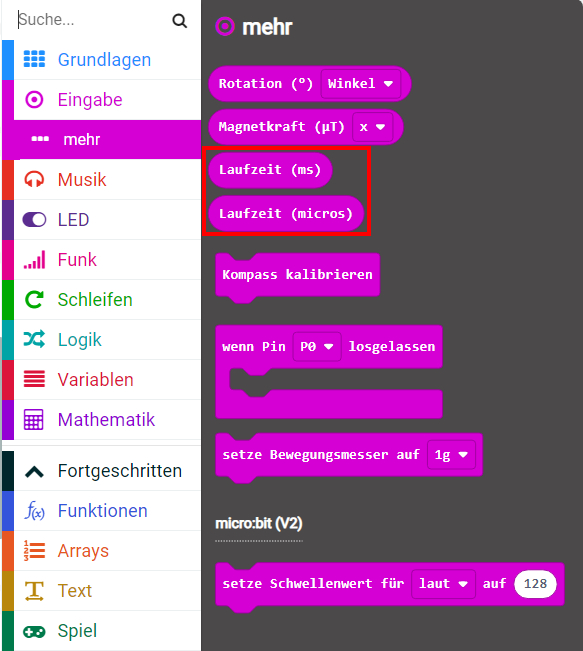



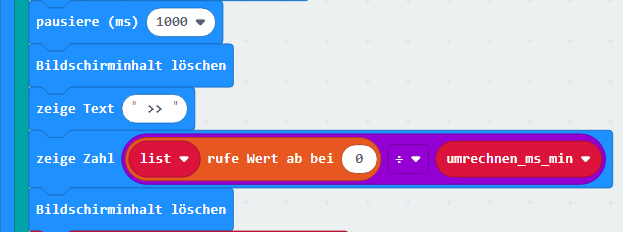
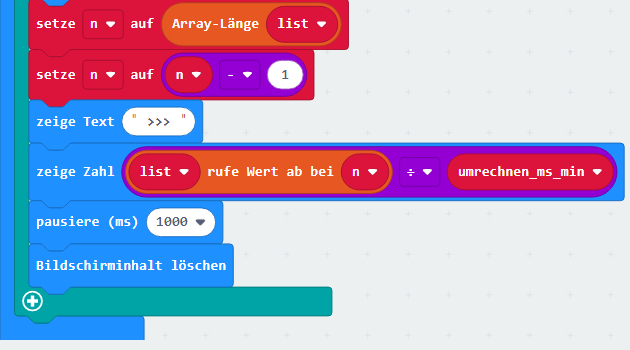


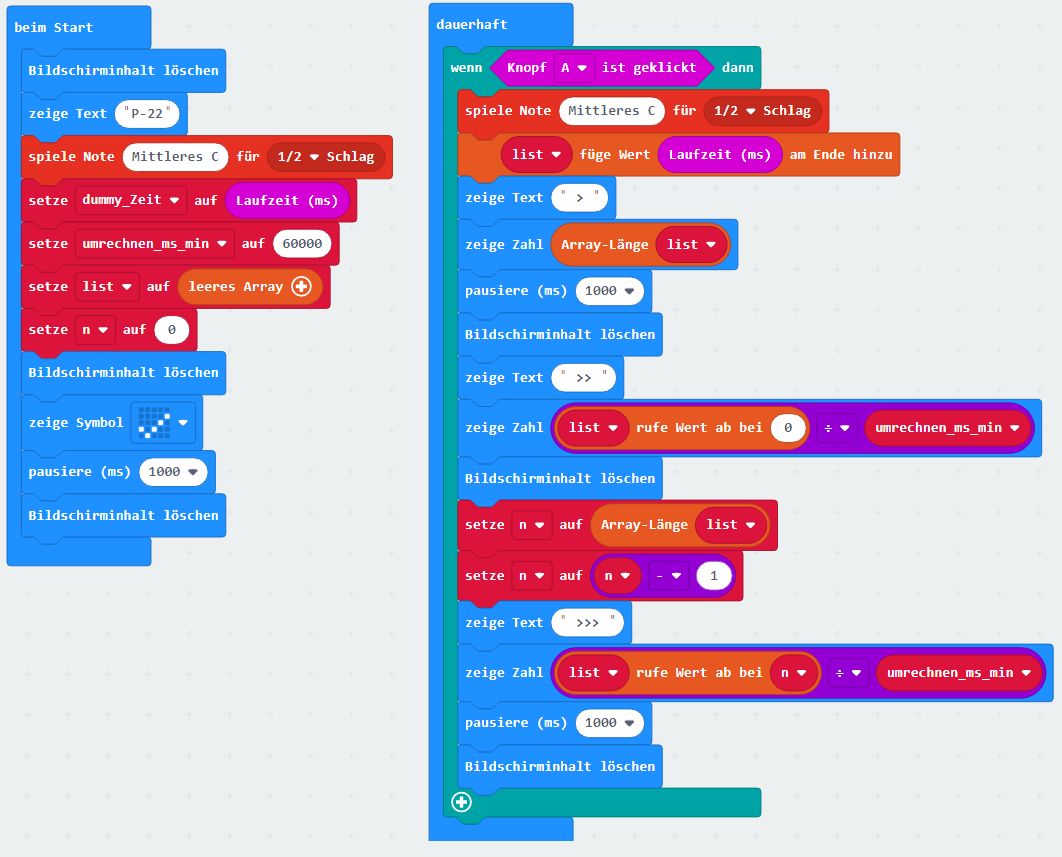
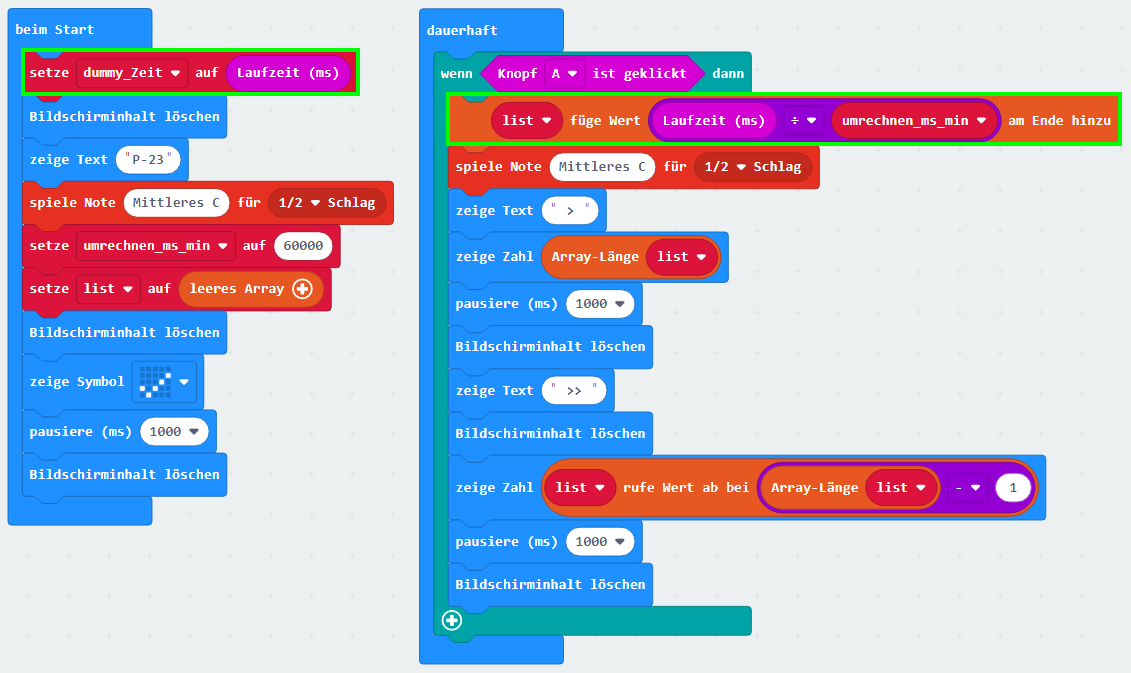
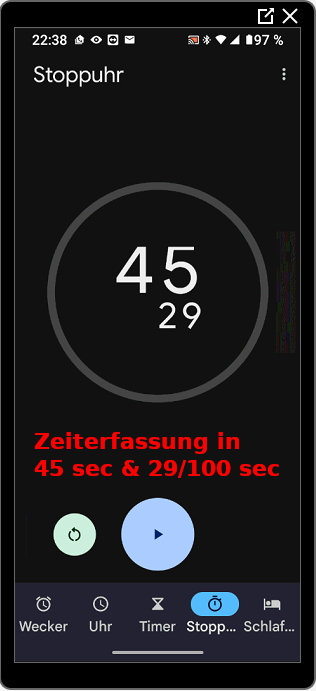

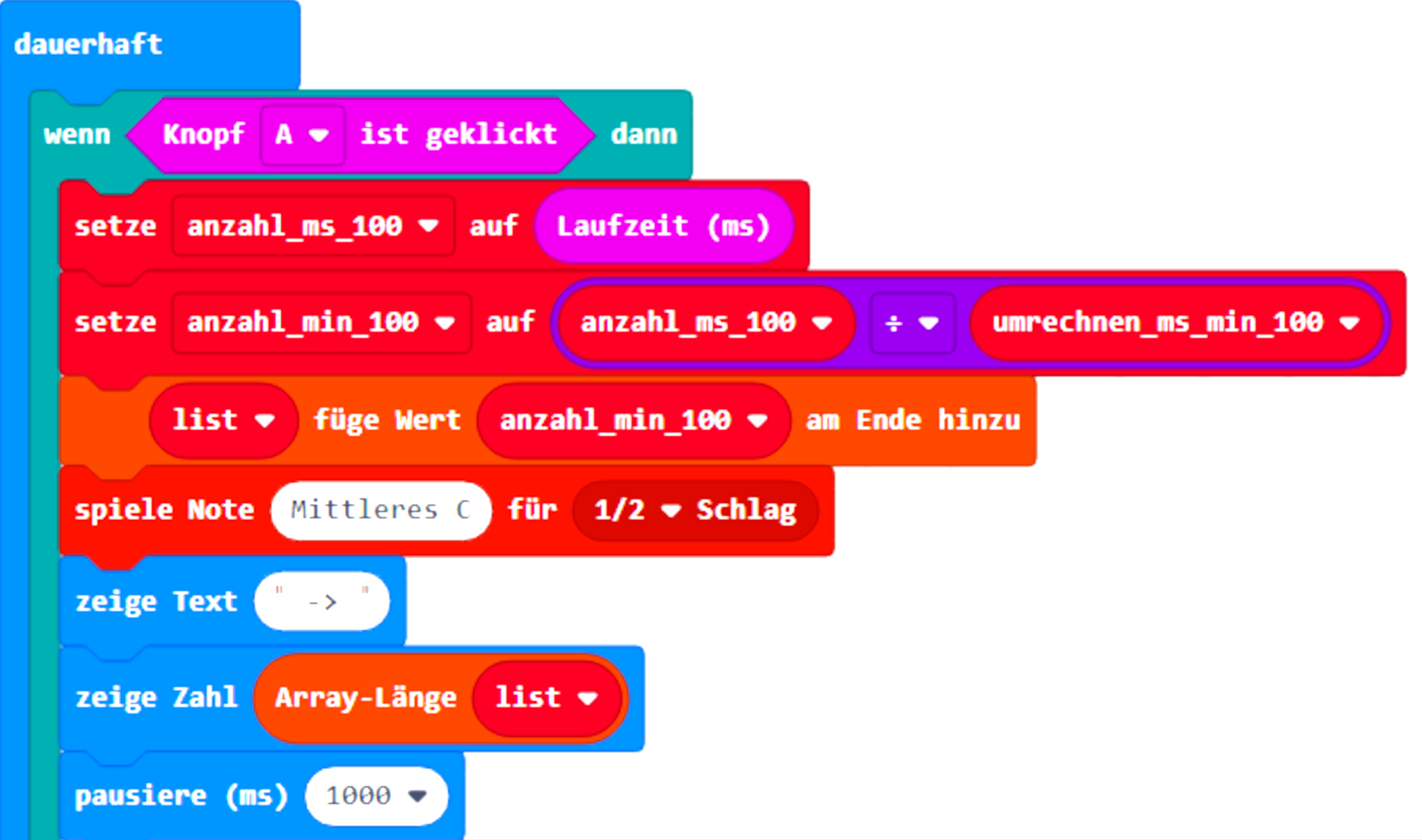
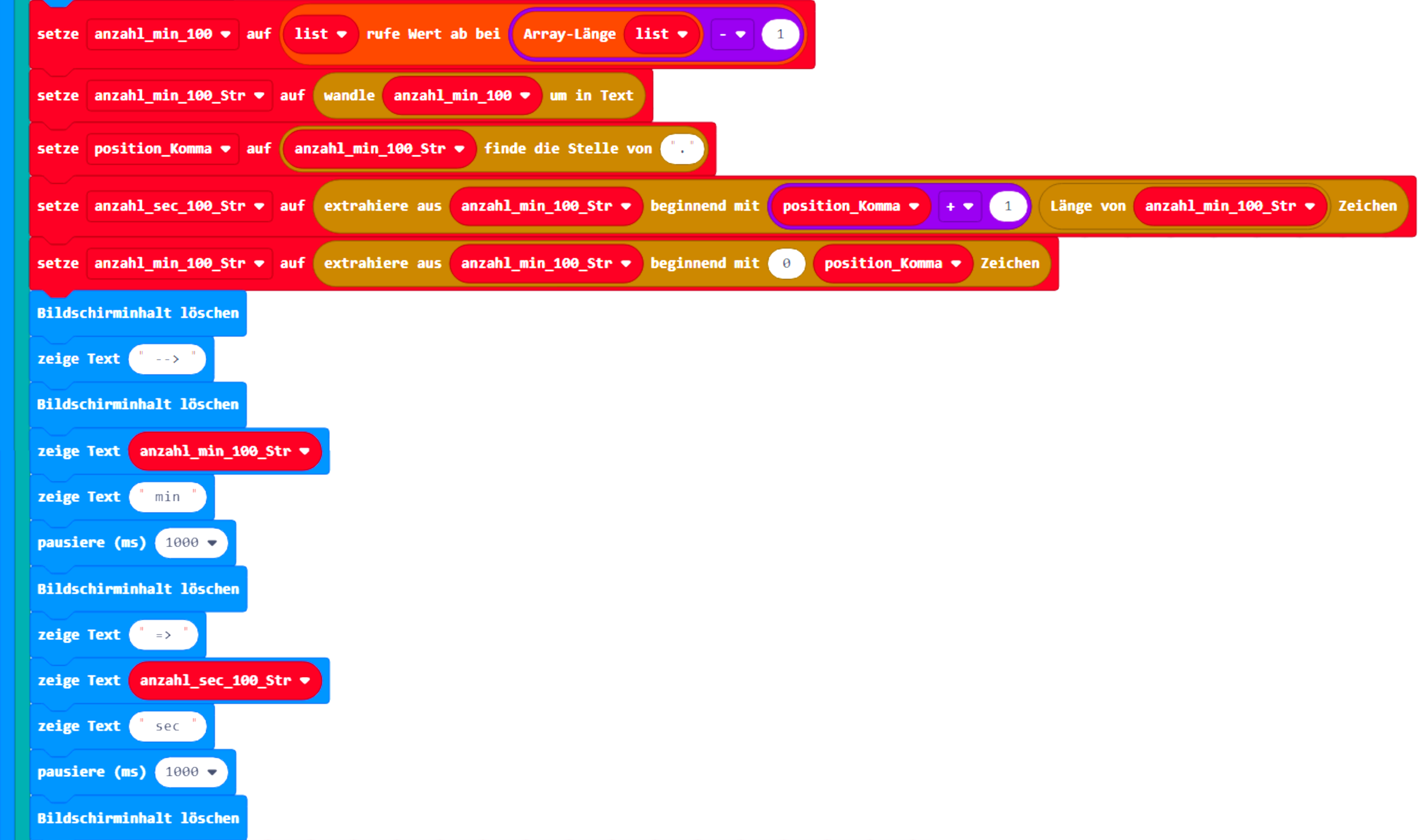

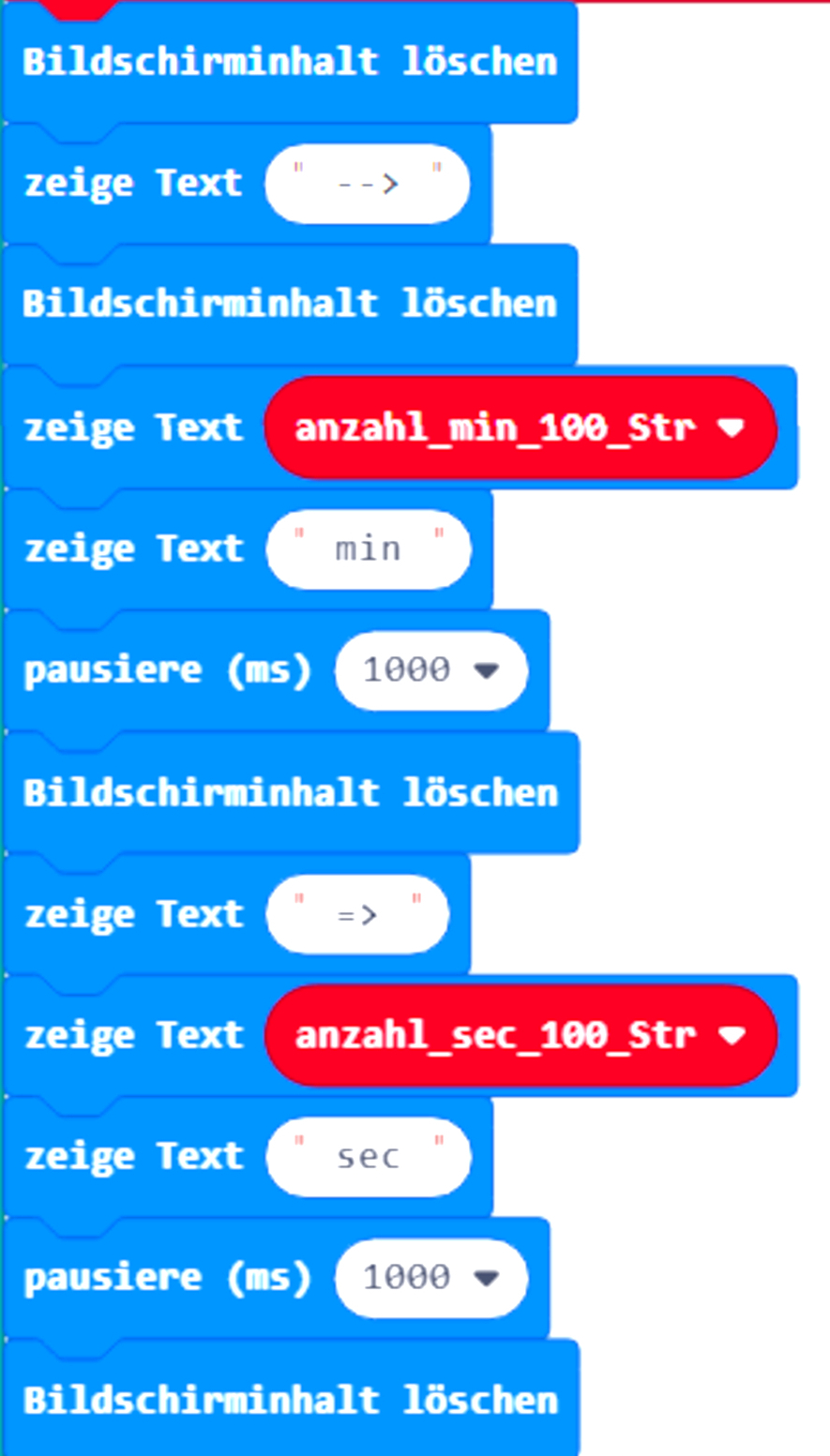

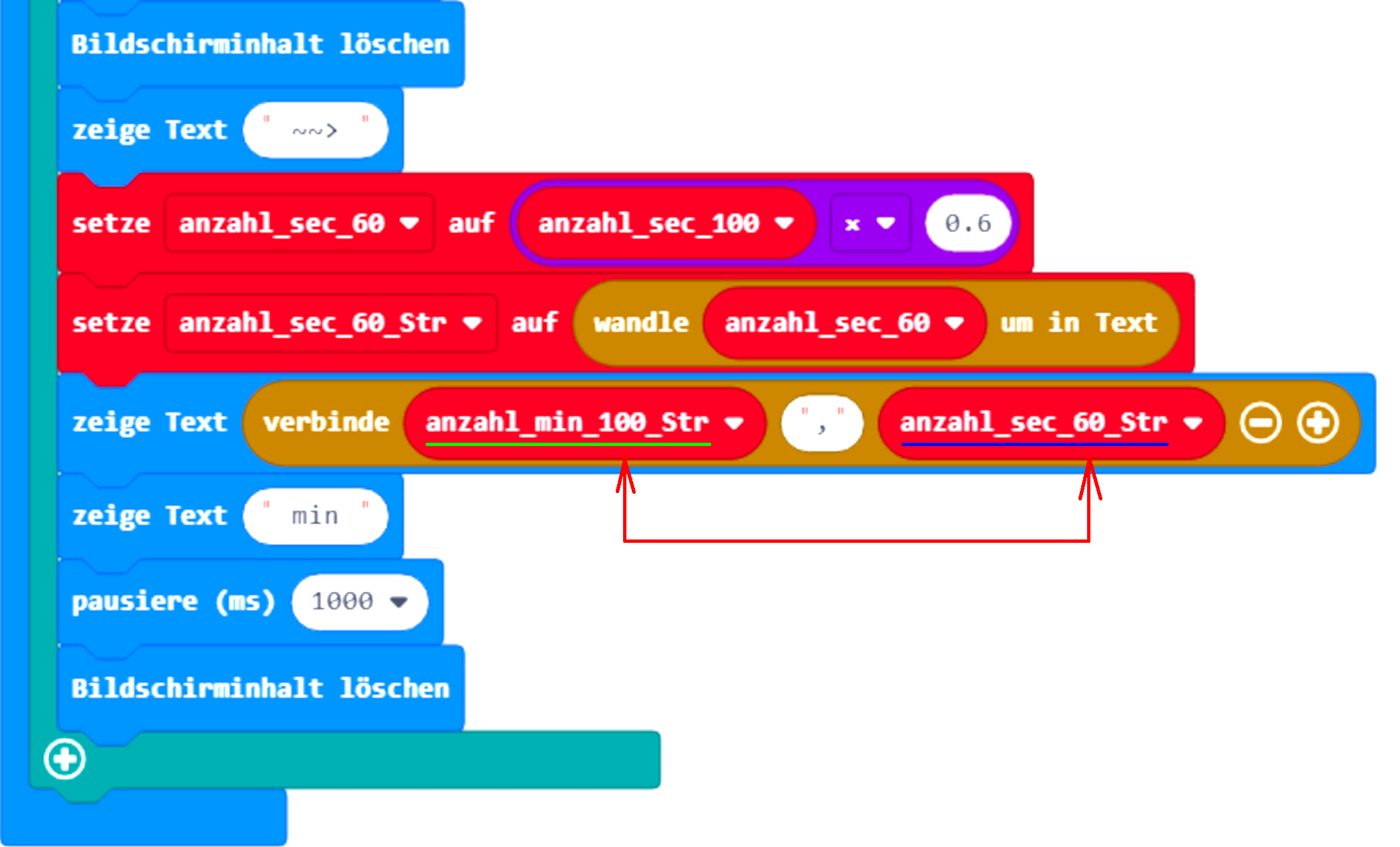

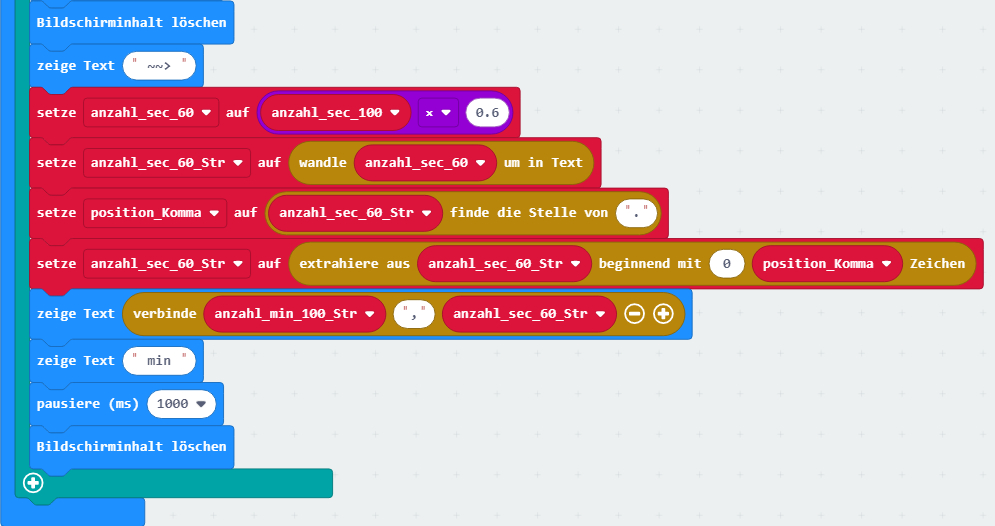


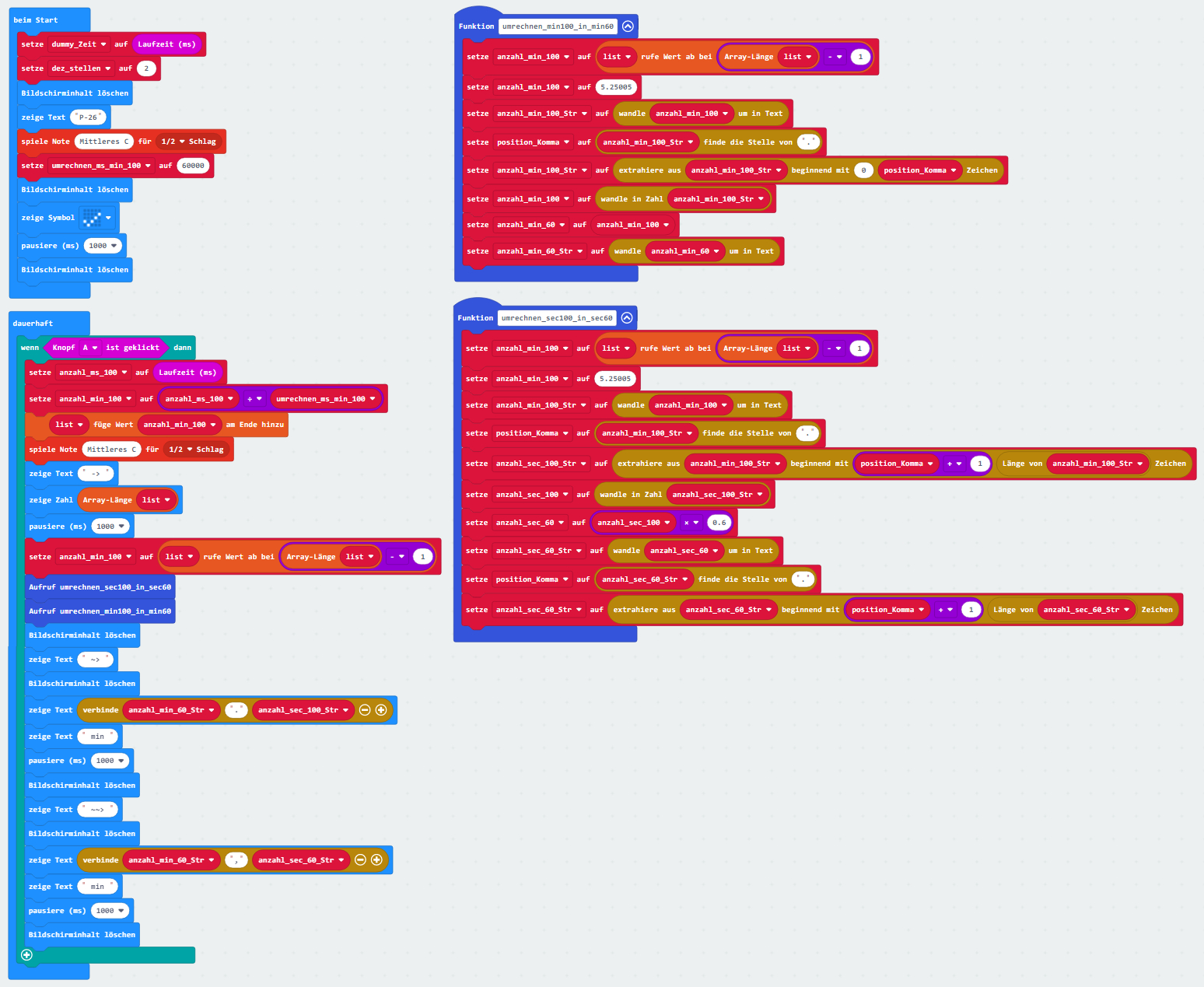

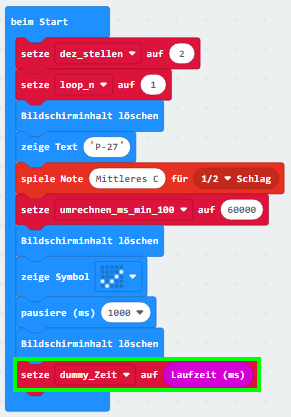
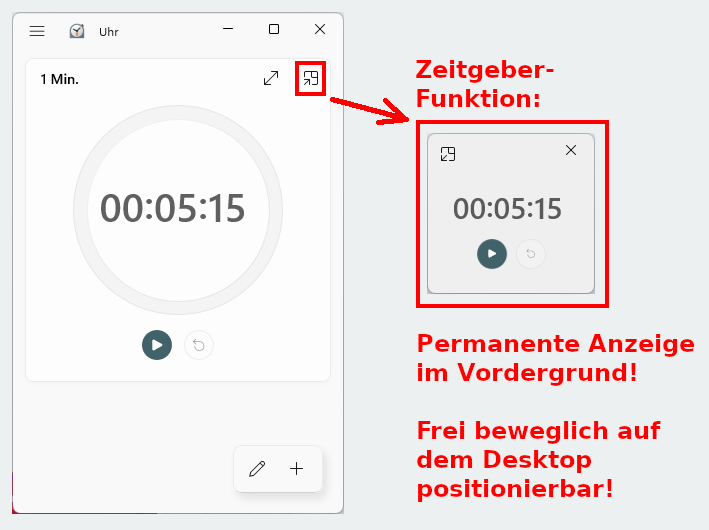
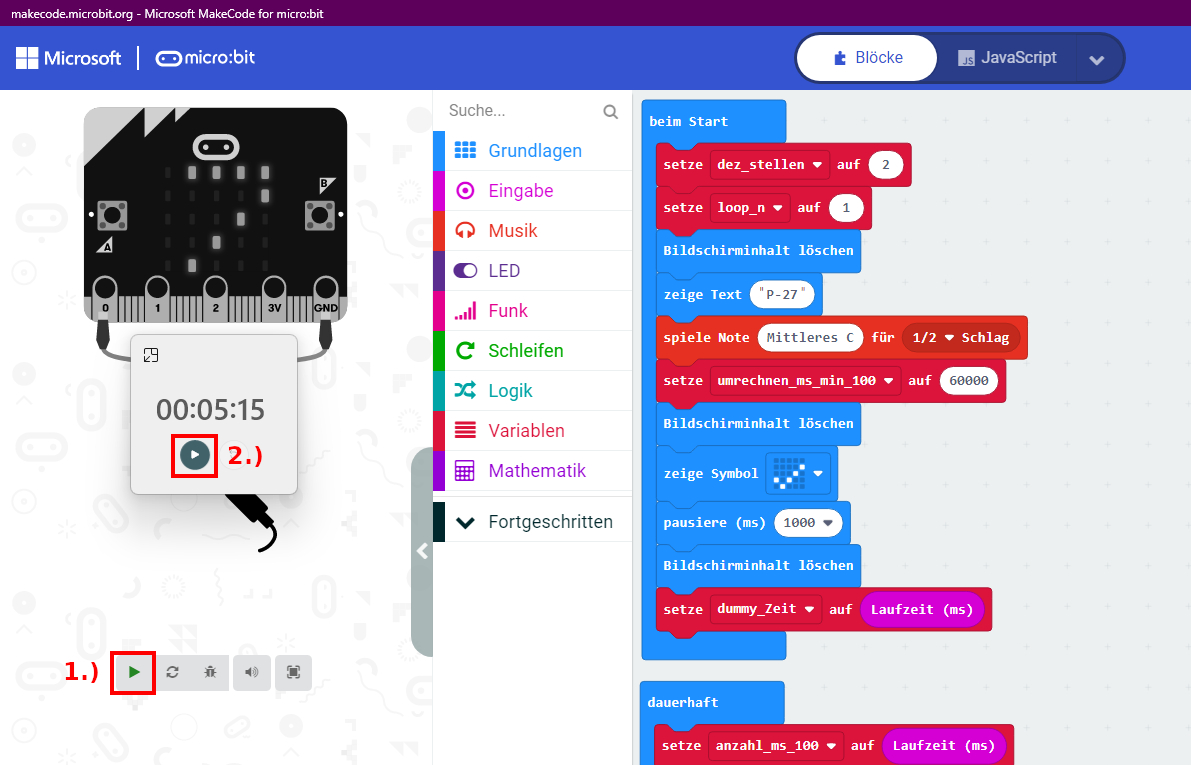






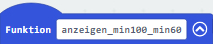
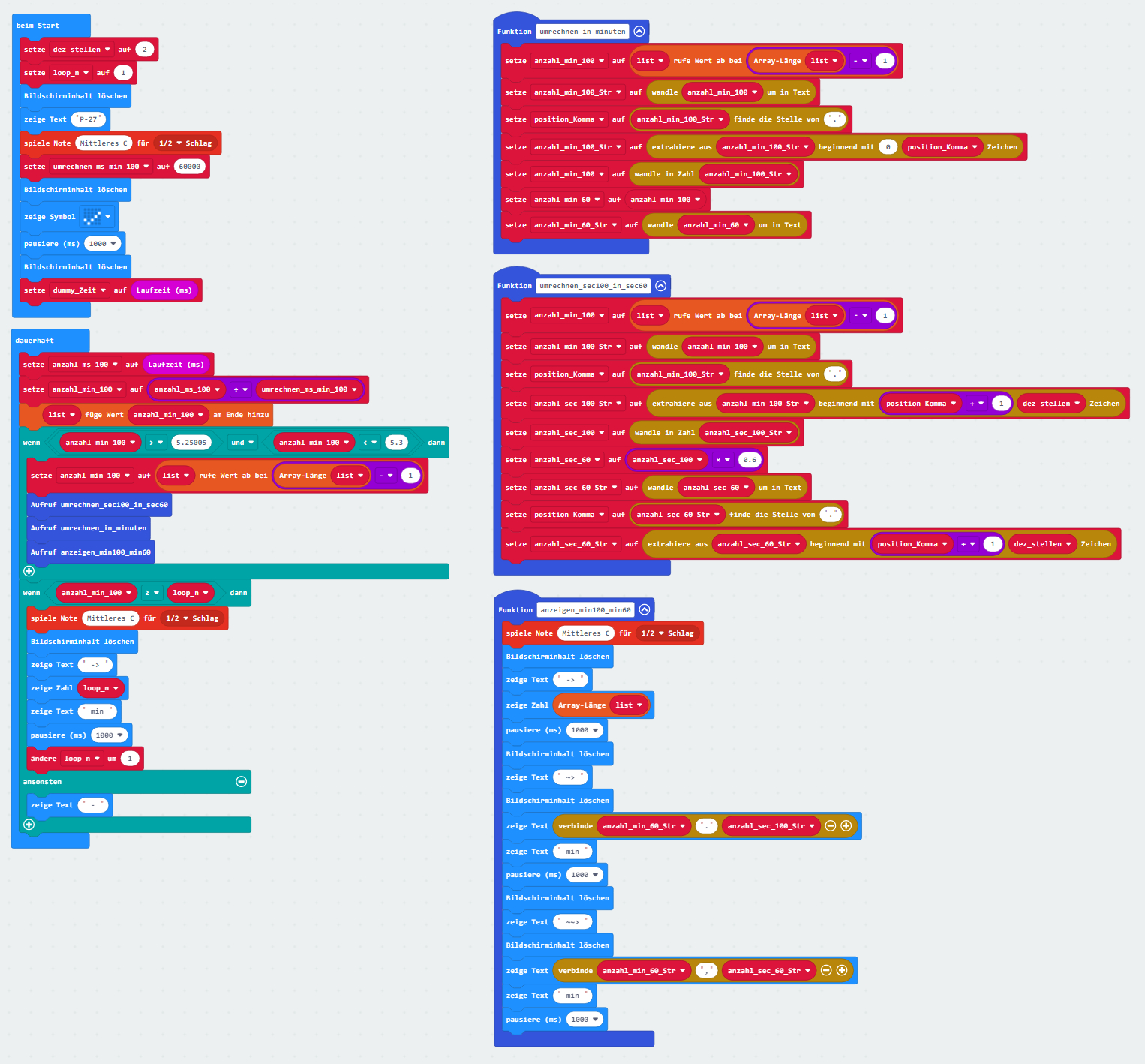

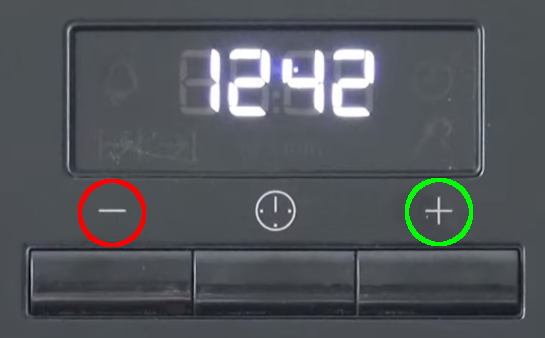

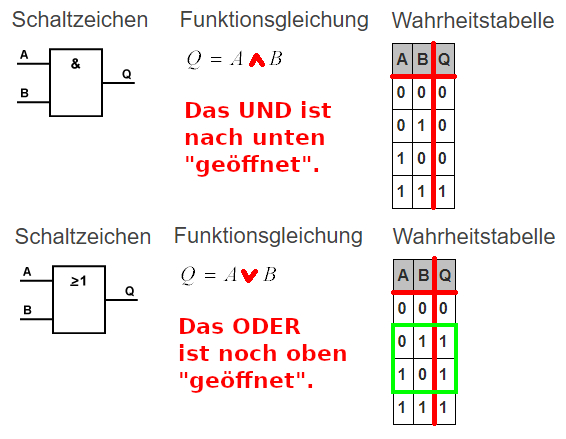
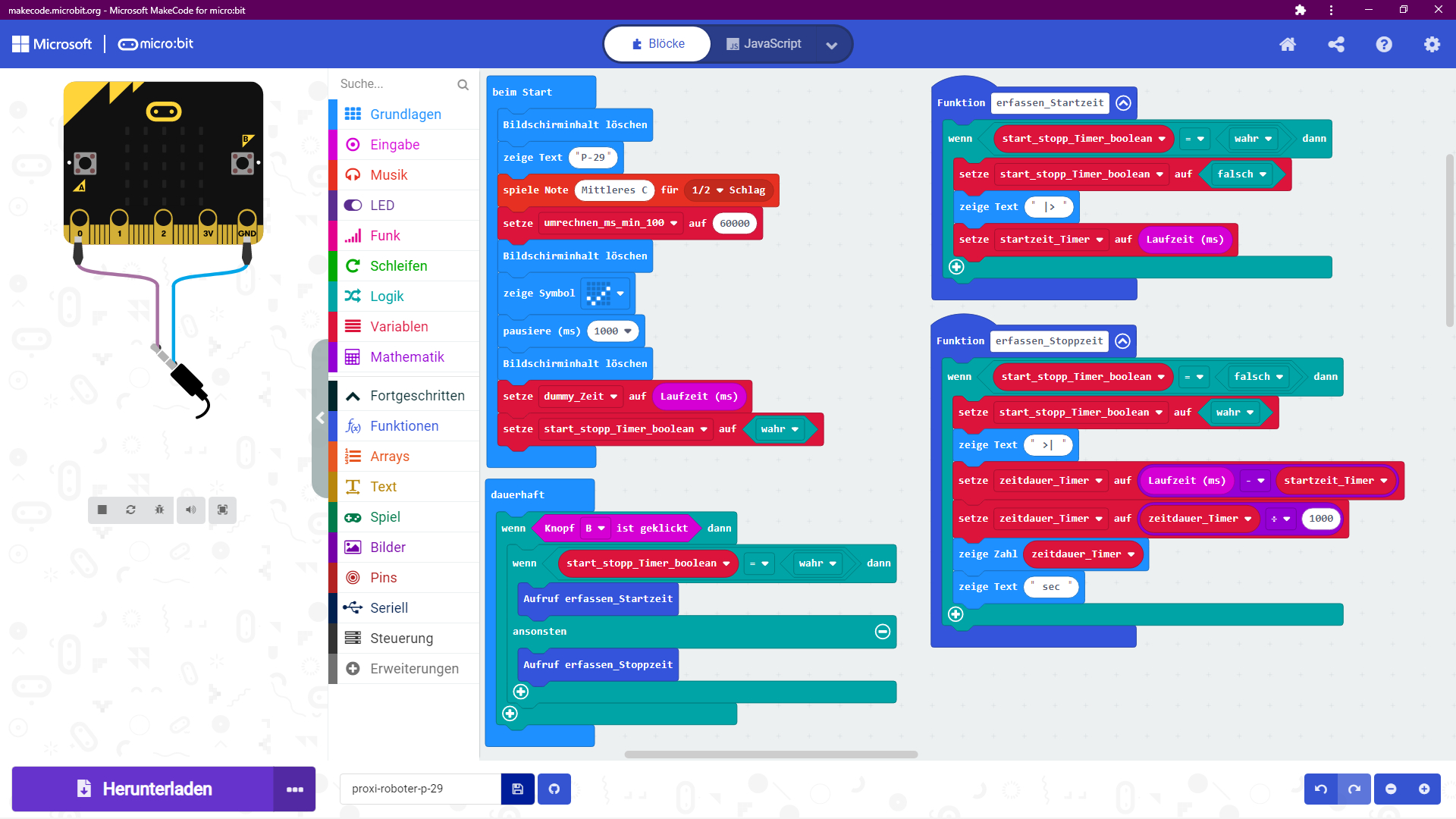
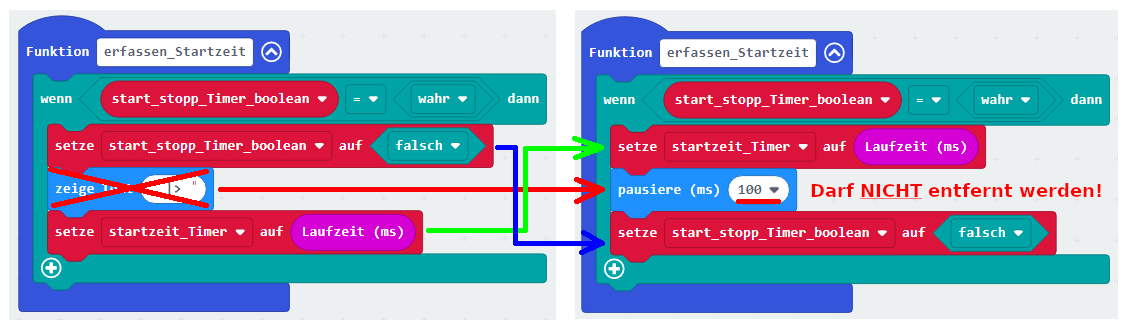
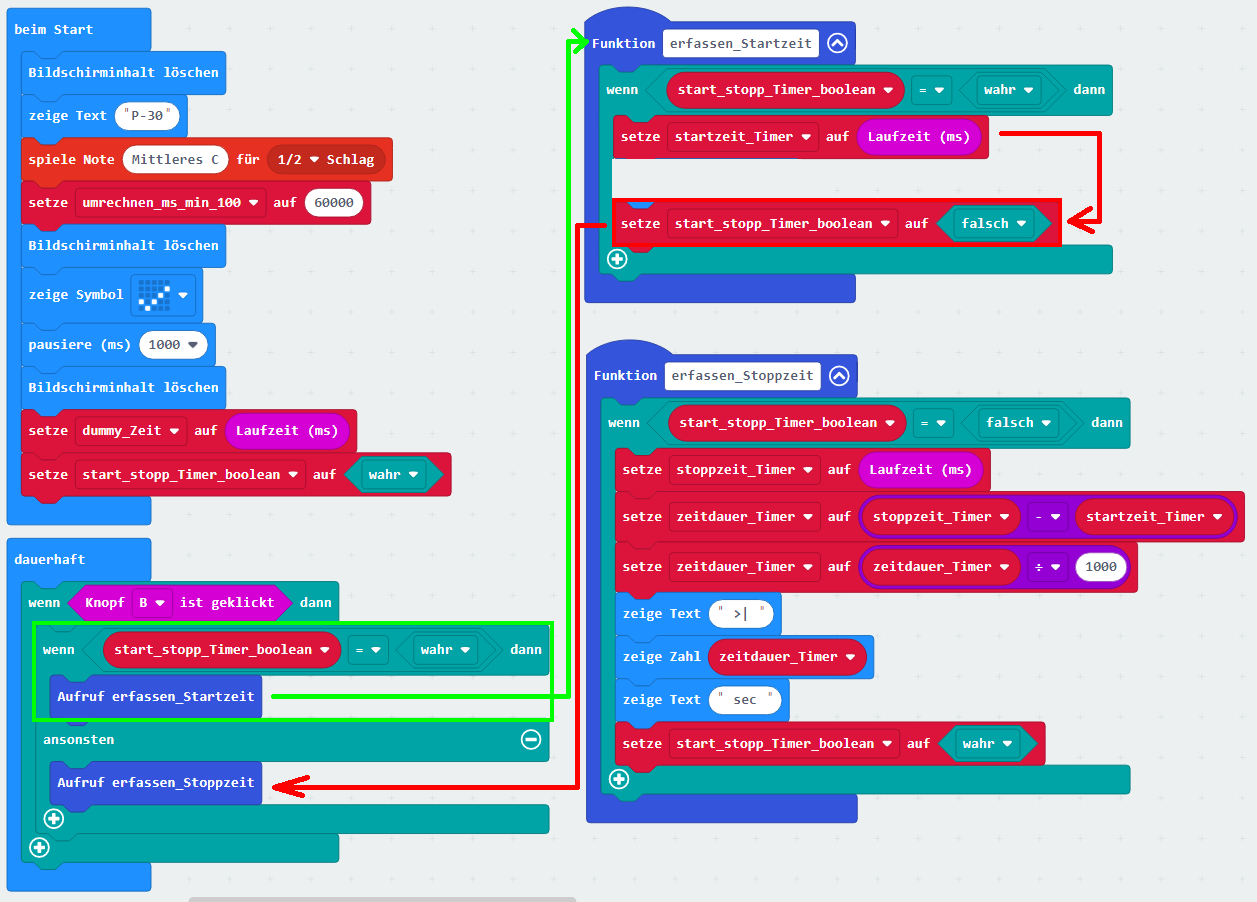
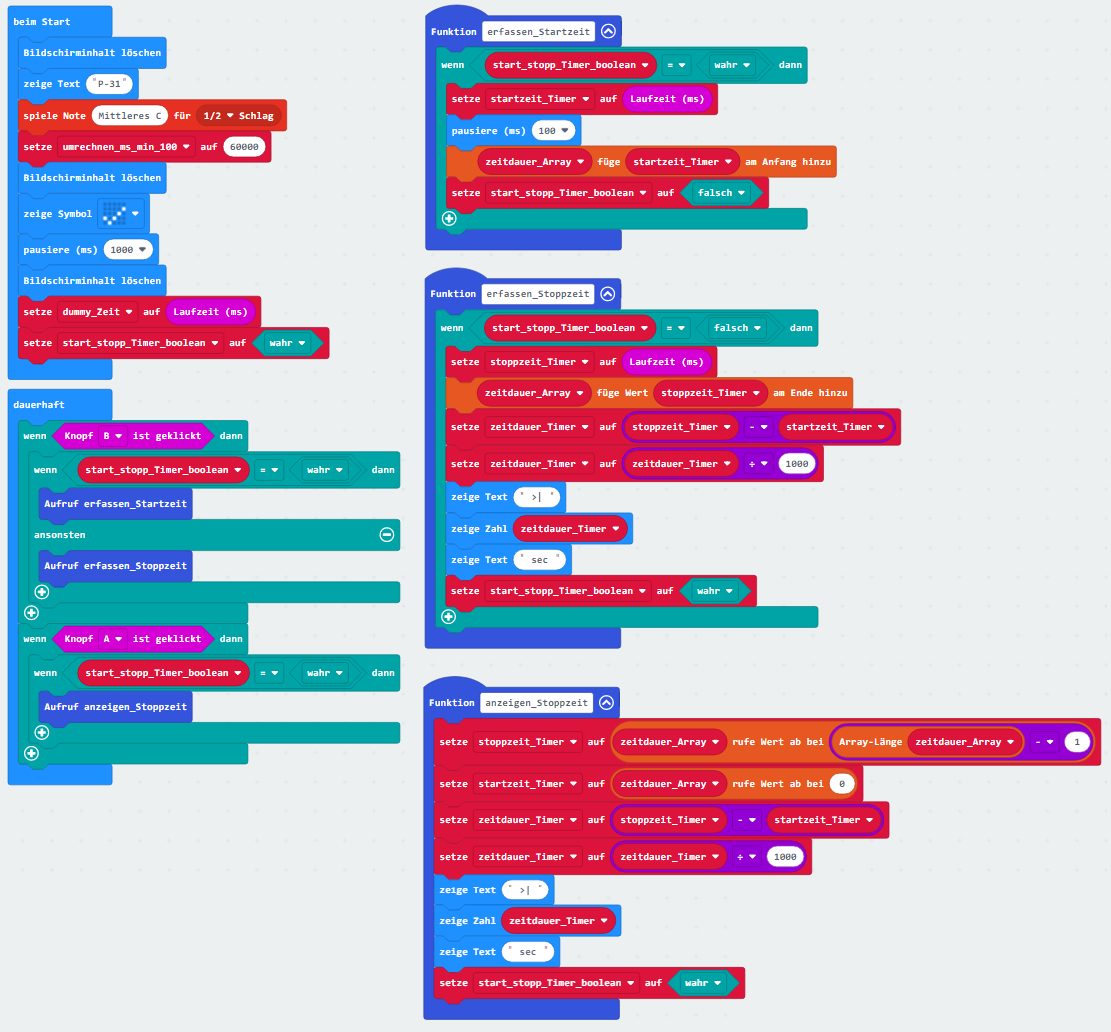
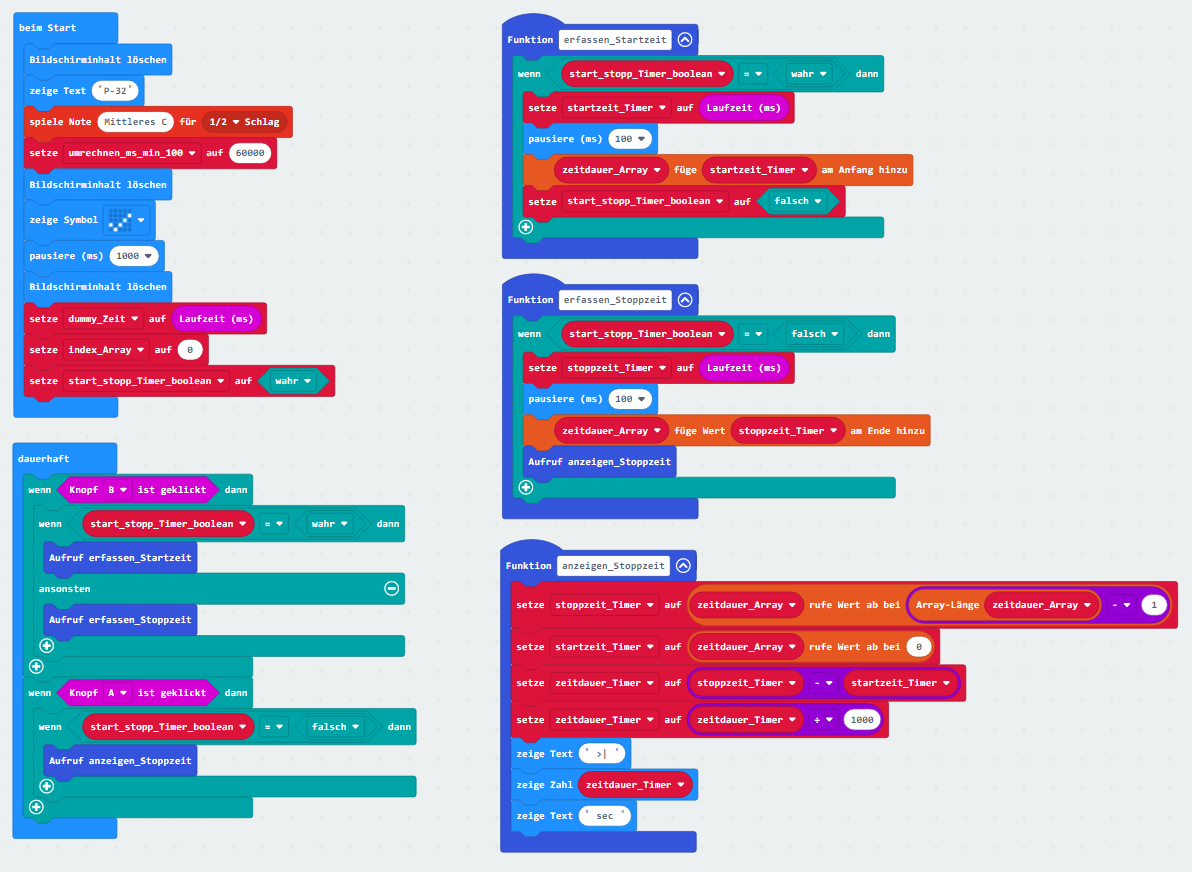
{kind=link}
{kind=link}
{kind=link}