|
|
[ Home ] [ zurück ] [ Seitenende ] [ Teil 3 ] [ Teil 5 ] |
|
|
|
micro:bit-Programmieren, Teil 4 1. Einleitung
Python
als Programmiersprache gibt es schon seit 1991, d.h. schon zu einer Zeit, wo
von „IoT“ absolut noch keine Rede war. „IoT“ ist die englischsprachige Abkürzung für
„Internet of
Things“, d.h. das „Internet der Dinge (und Dienste)“. Wenn aber
die Dinge „smart“, d.h. intelligent werden sollen, dann fragt man sich, wo
denn die Intelligenz herkommen soll. Nämlich von den engl. „serivces“, d.h.
den Dienstleistungen. Von diversen Servern einschließlich der
sogenannten „Cloud“ bzw. dem „Cloud Computing“. Wenn Sie eine sogenannte „FRITZ!Box“ mit
USB-Buchse an der Rückseite als VDSL-/DSL- und
WLAN-Router verwenden und dort einen USB-Speicherstick
angesteckt haben, dann verfügen Sie u.a. mittels des NAS, der Benutzerschnittstelle
sowie des Zugangs von außen über das Internet über Ihre eigene, engl.
„private“, d.h. nicht öffentliche Cloud. Wenn Sie an die zweite USB-Buchse der
FRITZ!Box dann auch noch den „micro:bit“-Rechner
anschließen, dann können Sie selbst für sich das „Internet der Dinge“
betreiben. Beispielsweise als „Smart Home“. Was dann
noch fehlt, wäre eine neue Programmiersprache für das „Internet of Things“,
die wiederum webbasiert, objektorientiert, ereignisgesteuert sein müsste und
darüber hinaus auch noch über eine Schnittstelle für die Künstliche
Intelligenz (KI) nebst Sprachein- und -ausgabe verfügt. Google z.B. arbeitet auch am „Internet of
Things“ und zwar nicht nur mit einer eigenen Entwicklungsumgebung, engl. „Software
Development Kit“ (SDK), sondern auch mit einem eigenen IoT-Betriebssystem
namens „Android
Things“. Auf der Webseite
kann man sich über die derzeit unterstützte Hardware informieren. Der „Raspberry Pi 3B“ gehört
übrigens auch dazu. - 2. „Hello
World!“ mit Herz
Wir legen sofort los mit der
Python-Programmierung und programmieren unser erstes Programm „microbit_teil_04_prog_01.py“,
das im „Notepad++“-Editor
wie folgt aussieht:
(Bild 01 - Hello
World! mit Herz) Wenn man sich das Programm, d.h. die Anzeige
des Programms anschauen will, dann muss es man erst noch
kompilieren/übersetzen. Dazu braucht man wiederum einen passenden Compiler, der den Sourcecode (siehe im Bild
oben) in hexadezimalen Maschinenkode
übersetzt. Und zwar so, dass dieser vom „micro:bit“-Rechner
verstanden
wird:
(Bild 02 - Python-Editor
& Compiler) Dabei geschehen das Kompilieren des Quelltextes und
das Herunterladen des Kompilats, d.h. die Übersetzung in Maschinenkode, in
einem Rutsch. Die dabei herunter geladene Kompilations-Datei
befindet sich auf dem Windows-PC standardmäßig im Verzeichnis \Downloads und trägt
den (Datei-) Erweiterungsnamen „.hex“ (siehe Programm „microbit_teil_04_prog_01.hex“) Dabei steht die Abkürzung „hex“ für hexadezimal,
sodass sich der Maschinenkode aus doppelten Zahlenwerten von 0 … 9, A, B, C, D, E, F zusammensetzt. Bei den Zahlenwerten
0 … 9
handelt es sich um dezimale Zahlen und von A … F um hexwertige
Zahlen von 1010 bis 1510. So bedeutet die hexadezimale Zahl „AFFE16“
(= 4505410) keine Beleidigung, wenn man sie ausspricht oder
in einer E-Mail zitiert, solange man den Index
16 für eine hexadezimale Zahl
hinzufügt. Wer das nicht weiß, darf sich natürlich trotzdem beleidigt fühlen,
nur strafbare wäre es im hexadezimalen Sinne nicht:
(Bild 03 – der
hexadezimale AFFE) Wie man im obenstehenden Screenshot sieht, lässt
sich der integrierte Taschenrechner unter Windows in den „Programmierer“-Modus
umschalten, sodass sich mit diesem ganz bequem hexadezimale Zahlen in dezimale
(und umgekehrt) umrechnen lassen. Leider gibt es auf der Homepage der „micro:bit Foundation“ für das
Programmieren mit der Programmiersprache
Python wider Erwarten keinen Emulator mit dem sich der Quelltext
direkt im Browser ausprobieren und anzeigen lässt. Aber
das ist kein Grund zu verzweifeln! Wer noch keinen „micro:bit“-Rechner (Hardware)
hat, kann seinen selbst erstellten Python-Quelltext trotzdem live im Internet, d.h. im Browser
ausprobieren. Klicken Sie auf der Webseite oben in der Menüleiste
auf „Create with
Code“, oder starten Sie die Emulation direkt hier: https://create.withcode.uk/
Jetzt stellt sich gleich die Frage, wie man
den Quelltext
(siehe Bild 01) in das Browserfenster
mit der Emulation
kopiert. Nämlich mittels „Copy and Paste“:
(Bild 04 – Quelltext
mittels „Copy & Paste“ übertragen) Ausgeführt wird dann das Programm „microbit_teil_04_prog_01.hex“
mit dem Quelltext „microbit_teil_04_prog_01.py“
indem man auf der Webseite mit der Entwicklungsumgebung
auf das Symbol {+} klickt, sodass sich das Menüfeld öffnet. Dort lässt sich
dann das Programm
durch Mausklick
auf das grüne
Symbol ► (siehe im roten Kreis) klickt. Das Programm selbst wird
dann im Fenster „mycode.py“ im siumulierten „micro:bit“-Rechner ausgeführt:
(Bild 05 –
Python-Programm in der Emulation ausführen) Wir erweitern das Programm, indem wir die Variablen „txtstr_1“
bis „txtstr_3“
deklarieren und mittels eines Textstrings, d.h. Zeichenkette initialisieren,
sodass diese zu Textvariablen werden:
(Bild 06 – Menüauswahl
mit Taster A und B) Bei der „while … True“-Schleife handelt es sich um eine Endlosschleife,
da die Bedingung „True“ fortwährend bis zum Stromausfall
oder dem Systemabsturz erfüllt ist. Das Problem dabei ist aber, dass sich die Endlosschleife
nur mittels des Statements „break“ verlassen lässt. Und das auch nur per Knopfdruck
auf den Taster
B. Da wir aber beim „micro:bit“-Rechner nur zwei
Taster A und B
haben, zahlen wir für den Programmausstieg einen hohen Preis, weil wir
eben einen Taster
dafür opfern müssen. Etwas ungewöhnlich ist die „elif“-Anweisung.
Dabei steht der Ausdruck „elif“ aber nur für „else if“ im Sinne von „wenn
nicht, dann anderenfalls …“ (siehe Programm
„microbit_teil_04_prog_02.hex“
mit dem Quelltext „microbit_teil_04_prog_02.py“).
Viel gravierender ist aber der Umstand, dass
der Eindruck entstehen könnte, dass eine „if …then“-Abfrage immer nur in Kombination
mit der „else
if“-Abfrage möglich ist. Dem ist aber genau nicht so:
(Bild 07 – Es geht
auch ohne „elif“-Anweisung) Beim Programmieren von „if“-Abfragen ist es nämlich viel
besser, weil übersichtlicher und verständlicher, wenn man mehrere
einzelne „if“-Abfragen
programmiert als diese zu einer Kombiabfrage zu verschachteln (siehe Programm „microbit_teil_04_prog_03.hex“
mit dem Quelltext „microbit_teil_04_prog_03.py“).
- Wenn es nur darum geht, dass die Anzeige „Hallo Welt!“
der Textvariablen „txtstr_1“ nur ein einziges Mal als Laufschrift
angezeigt wird und diese nicht fortwährend in einer Endlosschleife
angezeigt werden soll, dann kann man das Programm bzw. die Laufschrift so programmieren,
dass diese nach dem Anzeigen der Laufschrift automatisch beendet wird:
(Bild 08 – Einsparen
des Tasters B) ACHTUNG: Das was nach
der Programmänderung
leider nicht mehr funktioniert, ist das Statement ·
display.show(Image.HEART) Auch die beiden anderen Statements mit denen man eine Pause
programmieren kann, um z.B. die Anzeige weiterhin in der „5 x 5 LED-Matrix“-Display
anzuzeigen, ·
sleep(1000) oder ·
microbit.sleep(1000) funktionieren wider Erwarten nicht
(siehe Programm „microbit_teil_04_prog_04.hex“
mit dem Quelltext „microbit_teil_04_prog_04.py“).
- Wenn aber der „sleep“-Befehl nicht
funktioniert, dann muss man sich diesen selbst programmieren. Und zwar
mittels einer „while“-Schleife,
wie wir sie ja bereits vom Ansatz her kennen: n = 0 n_max = 4 while n < n_max: display.clear() display.scroll("Zaehler
= %s" % n) n = n + 1 Sicherlich ist Ihnen bereits die etwas
eigenartige Stringausgabe
beim Statement display.scroll("Zaehler
= %s" % n)
aufgefallen. Wenn Sie jetzt noch vermuten, dass ich mit dem „display.scroll“-Befehl
nur einzelne Zeichen, engl. „characters“ oder Zeichenketten, engl. „strings“
im Sinne einer Zeichenfolge als Laufschrift wiedergeben lassen, dann liegen Sie
richtig. Wenn man dann aber eine Zahl, einen Zahlenwert in der Laufschrift
wiedergeben möchte, dann muss man diesen zuvor umwandeln. Dazu muss
man bereits dem String "Zaehler = %s" mitteilen, dass ein Zahlenwert im
und als String
angezeigt werden soll. Deshalb die Angabe
„s“
für String
und die Angabe „%“ für einen numerischen Wert, d.h. einen Zahlwert. Da es sich bei der Variablen n von außen
gesehen, sowohl um eine Stringvariable als auch um eine numerische
Variable handeln kann und die Programmiersprache über keine
hellseherische Fähigkeiten verfügt, müssen wir dem Programm, dem Statement
mitteilen, dass es sich bei der Variablen
n um eine numerische Variable handelt, indem
man den Parameter „%“ der Variablen
n voran stellt (siehe oben). - Bei den Programmiersprachen gibt es sogenannte kopf-
oder fußgesteuerte
Schleifen. Dabei bedeutet „kopfgesteuert“, dass die Abfragebedingung „n < n_max“
gleich zu Beginn der Schleife, also bereits im Schleifenkopf
abgefragt wird. Zu den kopfgesteuerten Schleifen zählen z.B. „for“-
oder „while“-Schleifen,
während die „repeat
… until“-Schleifen zu den fußgesteuerten Schleifen
zählen.
(Bild 09 –
kopfgesteuerte „while“-Schleife) Wenn das Programm
„microbit_teil_04_prog_05.hex“
mit dem Quelltext „microbit_teil_04_prog_05.py“
ordnungsgemäß funktioniert, dann kann man die beiden Statements display.clear() display.scroll("Zaehler = %s" % n) aus dem Programm entfernen und gleichzeitig den „Pausen“-Zähler
z.B. auf den Wert n_max = 10000 erhöhen. Je nach dem, wie lange
die Pause andauern soll. - Werfen wir noch einen Blick auf die „for“-Schleife,
die in Python etwas Besonderes ist:
(Bild 10 –
kopfgesteuerte „for“-Schleife) Was aber ist das Besondere an der „for“-Schleife?
Es gibt keinen Schleifenzähler n, der am Ende der Schleife inkrementiert,
d.h. um einen Schritt von n auf n + 1 erhöht wird: n = n + 1 (siehe
weiter oben bei der „while“-Schleife). Bei der „for“-Schleife mit der Angabe „range(0, n_max)“ ist
nämlich der Schleifenzähler n bzw. das Inkrementieren bereits
eingebaut! Was aber ist ein engl. „range“, d.h. ein Bereich, eine Reihe, eine
Sammlung? Mit der Angabe
„range(0, n_max)“ wird festgelegt mit
welchem Wert der Bereich beginnt (= Anfangswert,
Startwert) und mit welchem dieser endet (= Endwert). Im vorliegenden
Fall beginnt der „Range“ bei 0 und endet bei 3, da wir von 0 an n_max = 4 Schritte nach oben
zählen, sodass der höchste von 4 Schritten bereits bei 3
erreicht ist, d.h. bei n < 4! Dabei zählt die Angabe „range(0, n_max)“ nicht nur
den integrierten Schleifenzähler, sondern auch gleichzeitig dafür,
dass dieser in Einerschritten, d.h. ganzzahlig hochzählt (siehe Programm „microbit_teil_04_prog_06.hex“
mit dem Quelltext „microbit_teil_04_prog_06.py“).
- Auch wenn „while True“-Endlosschleifen sehr bequem sind,
so ist der Umgang mit ihnen, d.h. das Hin- und Herschalten mit nur einem Taster
trotzdem nicht so einfach und deshalb gewöhnungsbedürftig:
(Bild 11 – „while
True“-Schleife mit Umschalter) Wie man im obenstehenden Programm „microbit_teil_04_prog_07.hex“
mit dem Quelltext „microbit_teil_04_prog_07.py“
sieht, lässt sich mit dem booleschen Umschalter „booleanSwitch“ die Laufschrift display.scroll("Hallo
%s" % txtstr_1) jederzeit ein- oder ausschalten. Dabei wird aber die Laufschrift nur ein einziges
Mal im „5 x
5 Matrix-LED“-Display angezeigt, da der boolesche Schalter „booleanSwitch“
anschließend sofort wieder umgeschaltet wird. Mit dem „break“-Befehl lässt sich die „while True“-Endlosschleife
wieder verlassen und das Programm beenden. Jetzt
wissen Sie, dass man mit dem logischen Schalter
„booleanSwitch“ zwischen zwei Anzeigen,
zwei Zuständen
oder Programmen
hin- und herschalten kann mit dem Vorteil, dass man dazu nur einen einzigen
Taster
braucht! - In der Praxis gibt es aber auch Situationen
und Erfordernisse, wo man eine Fehleranzeige, eine Meldung oder einen Infotext
permanent als Laufschrift im „5 x 5 Matrix-LED“-Display
anzeigen möchte und zwar so lange bis der Anwender auf die Info reagiert
und diese quittiert, z.B. indem er diese per Tastendruck ausschaltet (siehe Programm „microbit_teil_04_prog_08.hex“
mit dem Quelltext „microbit_teil_04_prog_08.py“):
(Bild 12 – „while
True“-Schleife mit Wechseltaster) Eine Fehleranzeige, eine Meldung oder einen Infotext
permanent als Laufschrift im „5 x 5 Matrix-LED“-Display
anzuzeigen, ist für den „micro:bit“-Rechner im Zusammenspiel mit den
beiden Tastern
A und B die ultimative Kommunikationsmöglichkeit, da der Rechner selbst
über keine vollwertige Tastatur oder ein mehrzeiliges LCD-Display
verfügt. Aber bei der Steuerung, Überwachung und
Kontrolle von elektrischen oder elektronischen Geräten, die teilweise entfernt
vom „micro:bit“-Rechner
aufgestellt und betrieben werden, braucht man dann aber auch
Betriebsanzeigen, das Anzeigen einer Störung oder eines Defektes usw.
Beispielsweise in Form von verschieden farbigen LED-Statusanzeigen wie z.B. „grün“
für „Gerät ist eingeschaltet“, „gelb“ für „Maschine arbeitet bzw. wartet auf
Bedienung“ oder „rot“ für „Störung“. Da der „micro:bit“-Rechner u.a. auch über drei
programmierbare Ports „Pin P0“ bis „Pin P2“ verfügt, lassen sich mit
diesen z.B. auch LEDs ansteuern, d.h. ein- oder ausschalten. - 3. Eine
LED programmiert ein- und ausschalten
Nachfolgend geht es darum, dass wir eine rote LED
zum Leuchten bringen, indem wir diese über einen entsprechenden Vorwiderstand
in Reihe an den Port „Pin 0“ anschließen. Wie man den Vorwiderstand als Funktion der roten LED
sowie der entsprechenden Betriebsspannung berechnet wurde bereits im Teil 3, Kapitel „3. Es werde
Licht - mit einer LED“ ausführlich behandelt. Wie Sie sicherlich schon wissen, lassen sich
die Ports „Pin
0“ bis „Pin 2“ programmieren. Und zwar als Ein- oder Ausgang.
Dabei wird dann wiederum zwischen analog und digital unterschieden. Wenn man eine LED am Port „Pin 0“ digital
einschaltet, dann gibt es nur zwei Schaltzustände und zwar entweder „ein“ (=
Strom ein, Stromfluss = „1“) oder „aus“ (= Strom aus, Stromfluss = „0“). Werte
dazwischen gibt es nicht. Beim Einschalten liegt dann die Ausgangsspannung vom Port „Pin 0“
an. Dabei kann die Ausgangsspannung entsprechend der Stromversorgung mittels
des „Micro-USB
2.0“-Kabels bis zu +3,3 V betragen. Mit dem nachfolgenden Programm „microbit_teil_04_prog_09.hex“
mit dem Quelltext „microbit_teil_04_prog_09.py“)
lässt sich die rote LED am Port „Pin P0“ zum Blinken bringen:
(Bild 13 – rote LED
digital einschalten) Beim Blinken der roten LED fällt auf, dass diese ziemlich hektisch
blinkt, was der unterschiedlichen Ein- und Ausschaltdauer geschuldet ist. Da sich aber die rote LED
nur ein- oder ausschalten lässt, lässt sich die Ein- und Ausschaltdauer nur über das Statement „sleep(20)“
und „sleep(480)“
einstellen. Wenn man das Puls-/Pausenverhältnis (= Ein- und
Ausschaltdauer) symmetrisch einstellt, sodass die beiden „sleep()“-Statements
über die gleiche Zeitdauer von 250 ms verfügen, dann beträgt die Periodendauer T =
500 ms mit der Frequenz f = 1 / T = 1 / ( 500 ms ) = 1/500 Hz.
Zum Vergleich: die Frequenz des Wechselstroms in Europa beträgt f = 50 Hz
= 1/T
= 1 / ( 50 ms ) = 0,02 s = 20 ms. Das bedeutet nichts anderes als dass eine
Glühlampe in 20 ms bis zu 50 mal an- und ausgeht. Für das menschliche Auge
aber ist die Wechselfrequenz
zwischen Hell
und Dunkel so schnell, dass man wegen dessen Trägheit nur sieht, dass die Glühlampe
einfach nur eingeschaltet ist und ununterbrochen leuchtet! Dazu muss
man erwähnen, dass eine Glühlampe beide Halbwellen der sinusförmigen Wechselspannung zum
Leuchten nutzt, sodass es zwischen den Wellenbergen keine größere Pause
gibt, die ein Flackern
des Lichts bewirken würde. Anders verhält es sich bei einer Leuchtdiode (= LED), da
diese normalerweise nur an Gleichspannung
betrieben wird und deshalb nur bei richtiger Polung leuchtet. Da es sich bei
einer LED
im Prinzip aber um eine spezielle Siliziumdiode, die in Durchlassrichtung
betrieben den größten Teil des elektrischen Stromes in sichtbares Licht
umwandelt, während sie in Sperrrichtung betrieben den elektrischen Strom sperrt,
handelt, ließe sich diese auch als sogenannter Einweggleichrichter
verwenden und an Wechselstrom betreiben. Aber nur in Verbindung
mit einem entsprechenden Vorwiderstand, der in Reihe zur LED
geschaltet werden muss, damit diese im Durchlassbetrieb nicht überlastet wird
und durchbrennt. Demzufolge würde eine LED, die mit Wechselstrom betrieben wird, stets
nur eine Halbwelle der Sinusschwingung durchlassen,
während die andere Halbwelle wegen des Betriebs der LED in
Sperrrichtung
gesperrt würde. Da beim Sperren der negativen Halbwelle
der Sinusschwingung
der Stromfluss
zum Erliegen kommt, entsteht eine entsprechende Pause bei dem die LED dunkel
bleibt mit der Folge, dass die LED nur noch flackert! Wenn also die rote LED im Zeitraum von T = 500 ms nur ein einziges
Mal ein- und dann wieder ausgeschaltet wird, dann beträgt die Frequenz f = 1 /
T = 1 / 500 ms = 0,002 Hz. Im Vergleich dazu würde eine Glühlampe
im gleichen Zeitraum 25.000 mal an- und ausgehen. Das ist dann auch der Grund
dafür, dass die „langsamere“ LED einfach nur blinkt, statt zu ununterbrochen
zu leuchten. Wenn also das Puls-/Pausenverhältnis der roten LED
im Verhältnis 1:1
symmetrisch ist, dann blinkt die LED zwar immer noch ziemlich schnell,
aber nicht nervös hektisch, sozusagen mehr oder weniger stressfrei.
Da beim „symmetrischen Blinken“ die Lichtausbeute entsprechend größer ist, leuchtet
die rote LED
zudem auch noch heller (siehe Programm
„microbit_teil_04_prog_10.hex“
mit dem Quelltext „microbit_teil_04_prog_10.py“).
- Wie bereits gesagt, lassen sich die Ports „Pin P0“
bis „Pin P2“
programmieren. Und zwar nicht nur als Ein- oder Ausgang, sondern auch
für analoge oder digitale Anwendungen. Aber selbst wenn man eine LED digital
ein- oder ausschaltet, muss man von Digitaltechnik, d.h.
von Gatterschaltungen
wie z.B. UND, ODER, NICHT, negatives UND (engl. „NAND“), negatives ODER
(engl. „NOR“), exklusives ODER (engl. „XOR“), RS- oder JK-Flip-Flops keine
Ahnung haben, sondern einfach nur wissen, dass es bei einem digitalen Schalter
entweder nur den Schaltzustand „ein“ (= „1“)oder „aus“ (= „0“) gibt. Analoge Zwischenwerte
wie etwas an im Sinne von halb so hell oder halb so dunkel gibt es demzufolge
nicht! Wenn man also wie im Programm oben die rote LED
digital ein- und ausschaltet, sodass diese periodisch, d.h. im
wiederkehrend im gleichen Rhythmus blinkt, dann benutzt man zum Ein-
und Ausschalten einfach nur die beiden Statements
„pin0.write_digital(1)“ oder „pin0.write_digital(0)“, sodass ich eben nicht wissen muss,
dass eine LED
erst bei einer Flussspannung
von UF = 1,6 V leuchtet und stets nur in Verbindung mit
einem in Reihe geschalteten Vorwiderstand
RV = 100 Ω
betrieben werden sollte, damit diese nicht wegen eines zu hohen Durchlassstromes ILED < 20 mA
durchbrennt. Wenn man aber, wie im Programm „microbit_teil_04_prog_11.hex“
mit dem Quelltext „microbit_teil_04_prog_11.py“
zu sehen,
(Bild 14 – rote LED
analog einschalten) die rote LED analog ein- und ausschalten
will, dann muss man schon wissen, dass eine LED
erst bei einer Flussspannung
von UF = 1,6 V leuchtet und stets nur in Verbindung mit
einem in Reihe geschalteten Vorwiderstand
RV = 100 Ω
betrieben werden sollte, damit diese nicht wegen eines zu hohen Durchlassstromes ILED < 20 mA
durchbrennt. Dazu muss man dann auch wissen, welchen Wert die Betriebssspannung
UBetrieb = UF +
URV <= +3,3 V haben sollte,
damit die rote
LED beim analogen Einschalten dann auch tatsächlich leuchtet!
Wenn z.B. die zur Verfügung stehende Betriebssspannung
nur UBetrieb = 3,23 V beträgt und die rote LED zum kräftigen Leuchten
eine (Durch-)
Flussspannung von UF
= 1,6 V benötigt, dann bleiben für den Spannungsabfall ∆URV
am Vorwiderstand
RV nur noch ∆URV = UBetrieb
- UF = 3,23 V - 1.6 V = 1,63 V übrig, sodass sich der Vorwiderstand RV bei
einem Strom
von ILED = 20 mA wie folgt berechnet: RV = ULED / ILED = ∆URV / IF
= 1,63 V / 20 mA = 0,0815 KΩ = 81,5 Ω Wenn man aber einen Vorwiderstand mit RV = 100
Ω verwendet, dann befindet man sich wegen des geringeren
Stromes IF
mit IF =
IRV =∆URV / RV = 1,63 V / 100 Ω
= 0,0163 A = 16,3
mA auf der sicheren Seite! - Im Zusammenhang mit der Flussspannung der roten LED
von UF = 1,6 V wissen wir, dass diese ab diesem Wert zu
leuchten anfängt. Bezüglich des digitalen Wertes von 10232 bedeutet dies, dass wir die zur
Verfügung stehende Betriebssspannung von UBetrieb = 3,23 V
diesem gleichsetzen können, sodass wir gemäß Dreisatz einen analogen Wert von
10232 / 3,23 V * 1,6 V = 506,752 ≈ 5072
einstellen müssen, damit die rote LED gerade so zu glimmen anfängt.
Rechnerisch, theoretisch! In der Praxis zeigt sich nämlich, dass die rote LED
selbst bei einem digitalen Wert
von 1
immer noch deutlich erkennbar leuchtet:
(Bild 15 – rote LED leuchtet
ganz schwach) Da die Gesamtspannung UPin P0 an der Reihenschaltung von roter LED und Vorwiderstand RV unter Last
nicht wie oben angenommen UBetrieb
= 3,23 V beträgt, sondern nur UPin P0 = ULED+RV =
2,72 V ausmacht, ergibt sich pro digitalem
Wert
eine Spannungsänderung
am Port „Pin
P0“ von 2,72 V / 10232 = 0,00265885 V / Bit = 2,66 mV /
Bit. Demzufolge stellt sich am Port „Pin P0“ für den digitalen
Bitwert 12
die analoge Spannung von 2,66 mV/Bit ein, wobei die rote LED trotzdem noch ganz
schwach glimmt. Besonders gut lässt sich das erkennen, wenn man direkt von oben
auf die LED
schaut, da diese über eine kleine eingebaute Linse verfügt, die das Licht fokussiert.
Abschließend
bleibt noch zu klären, weshalb die rote LED bei einem nahezu hälftigen Bitwert
von 5072
(siehe oben) wider Erwarten nicht halb so hell leuchtet als erwartet.
Der Grund dafür dürfte der sein, dass sich die Helligkeit der roten LED
nicht linear, sondern eher quadratisch ändert. Das aber lässt sich
wegen der fehlenden technischen Daten im Moment nicht verifizieren. - Nachdem wir also die rote LED sowohl analog also
auch digital ein- und ausschalten können, liegt es auf der Hand, dass
wir diese auch programmiert, d.h. mittels des Tasters A ein- und
ausschalten. Diesbezüglich bietet es sich an, dass wir das Programm „microbit_teil_04_prog_08.hex“
mit dem Quelltext „microbit_teil_04_prog_08.py“
aufgreifen und der Einfachheit halber die Laufschrift im „5 x 5
LED-Matrix“-Display
(Bild 16 - Laufschrift
gegen LED-Blinken austauschen) gegen die Statements mit der Funktionalität des Blinkens
wie folgt auswechseln:
(Bild 17 - LED-Blinken
gegen Laufschrift ausgetauscht) Wie im Screenshot von Bild 17 zu sehen ist,
kommt bei den Statements
mit dem Blinken
u.a. auch die Statements „sleep(20)“ und „sleep(480)“ zum Einsatz. Dabei verhält es sich so, dass
sich das Python-Programm
mit den „sleep()“-Statements
wider Erwarten nicht mit dem Emulationsprogramm auf der Homepage von „create.withcode.uk“ kompilieren lässt!
Deshalb muss man das Python-Programm mit den „sleep()“-Statements
mit Compiler-Programm
von MicroPython & python
auf der Homepage von „https://www.microbit.co.uk/app/“
kompilieren, herunterladen und auf den „micro:bit“-Rechner flashen. Da sich das neue Programm „microbit_teil_04_prog_13.hex“
mit dem Quelltext „microbit_teil_04_prog_13.py“
aber trotzdem an einer entscheidenden Stelle vom Ursprungsprogramm „microbit_teil_04_prog_08.hex“
mit dem Quelltext „microbit_teil_04_prog_08.py“
unterscheidet, nämlich beim booleschen Umschalter booleanSwitch = True (… anstelle von
vormals „False“
im Ursprungsprogramm), müssen wir die Abfrageroutine if button_a.is_pressed(): noch näher untersuchen. Beginnen wir mit dem Ursprungsprogramm:
(Bild 18 - boolesche
Abfrage des Tasters A) Im neuen Programm sieht der Quelltext praktisch genau so aus, nur halt mit negativer
Logik, weil der boolesche Schalter
„booleanSwitch“ anders gesetzt ist:
(Bild 19 - boolesche
Abfrage des Tasters A) Wenn also das Programm nach dem Flashen, d.h. dem Übertragen in den
Arbeitsspeicher, ohne den Taster A zu drücken, startet, dann ist
der boolesche Schalter „booleanSwitch“ auf „true“ gesetzt, sodass als Erstes
die beiden Statements
display.clear() display.scroll("Start ...") ausgeführt werden und die Laufschrift „Start …“ im „5 x 5
LED-Matrix“-Display angezeigt wird. Direkt danach geht es in die äußere,
große „while
True:“-Endlosschleife und von dort gleich in die innere,
kleine „while
booleanSwitch == True“-Schleife. Wenn man dann in der inneren,
kleinen Schleife den Taster A betätigt, dann verlässt man diese
wieder, um gleich wieder in der inneren, kleinen Schleife zu landen,
weil sich der Wahrheitswert
des booleschen Schalters „booleanSwitch“ nicht geändert hat! Erst wenn man den Taster A länger gedrückt
hält, landet man nach dem Verlassen der inneren, kleinen Schleife
wieder in der äußeren, großen „while True:“-Endlosschleife wo dann schließlich
die Laufschrift „… on“ angezeigt wird und der boolesche Schalter „booleanSwitch“
auf den Wert „False“
gesetzt wird. Dass der boolesche Schalter „booleanSwitch“ auf den Wert „False“
gesetzt wurde, wirkt
sich aber im weiteren Programmablauf wider Erwarten nicht aus, da das Programm nach dem „break“-Befehl
fortfährt und jetzt endlich die rote LED blinken lässt! Dazu muss
man wissen, dass der „break“-Befehl dazu dient, eine „while“-Schleife
sofort zu verlassen, um dann irgendwann später nach dem „break“-Befehl
wider mit dem normalen Programmablauf fortzufahren! Deshalb blinkt dann auch die rote LED in der inneren,
kleinen „while
booleanSwitch == True“-Schleife, obwohl
ja die boolesche Variable „booleanSwitch“ zwischenzeitlich den Wahrheitswert „False“
angenommen hatte:
(Bild 20 - dass
vollständige Programm) Wahnsinn!
Da muss man erst einmal drauf kommen bzw. auch später dran denken, dass der Programmablauf hinter dem „break“-Befehl wieder aufgenommen
und fortgesetzt wird! Apropos fortsetzen. Wenn man die innere, kleine „while
booleanSwitch == True“-Schleife mittels „break“-Befehl verlässt, dann kann
man jederzeit wieder in diese zurückkehren, indem man den Befehl
„continue“, d.h. fortsetzen, verwendet. „break“
und „continue“
bilden also ein Geschwisterpaar und gehören deshalb zusammen. Immer dann, wenn man eine innere Schleife
mittels „break“
verlassen hat und man nicht genau weiß, was das Programm
dann in der äußeren Schleife alles so macht, dann lässt sich mittels „continue“ wieder die Kontrolle
zurückgewinnen, da dann das Programm wieder in die innere Schleife
zurückkehrt und dort weiter macht, wo man zuvor mittels „break“
ausgestiegen war!
Mit dem Programm
„microbit_teil_04_prog_14.hex“
und dem Quelltext „microbit_teil_04_prog_14.py“
lässt sich der Rücksprung in die innere, kleine „while booleanSwitch == True“-Schleife
mit dem Statement „continue“ direkt ausprobieren, sodass sich das laufende
Programm
nicht mehr durch Tastendruck auf den Taster B beenden lässt:
(Bild 21 - die
Statements „break“ und „continue“) Wenn man auf Nummer sicher gehen und sich
überzeugen will, dass man sich beim Blinken der roten LED tatsächlich in der inneren,
kleinen „while
booleanSwitch == True“-Schleife befindet, dann muss man nur die Kommentaranweisung „#“ entfernen, sodass man fortwährend die
Laufschrift „Bin
jetzt hier!“ angezeigt bekommt. Aber das ist noch nicht alles! Schließlich hat
der „break“-Befehl
noch mehr zu bieten! Ein kleines Geheimnis, eine Besonderheit, die es noch zu
entdecken gilt:
(Bild 22 - „break“
spaltet „while“-Schleife) Wie man oben im Screenshot sieht, gibt es nun
im Quelltext in der inneren, kleinen „while booleanSwitch == True“-Schleife
zwei neue Statements und zwar display.scroll("First!")
und display.scroll("Second!") mit der Besonderheit, dass das erste Statement display.scroll("First!")
vor dem „break“-Befehl steht und das zweite Statement display.scroll("Second!")
nach dem „break“-Befehl, sodass dieser die beiden Statements
nicht nur trennt, sondern auch getrennt abarbeitet (siehe Programm „microbit_teil_04_prog_15.hex“
und dem Quelltext „microbit_teil_04_prog_15.py“).
Dass man mit dem „break“-Befehl aus der inneren,
kleinen „while
booleanSwitch == True“-Schleife heraus verzweigt, diese
also vorübergehend verlässt, wissen wir ja bereits. Außerdem wissen wir, dass wenn der „break“-Befehl
abgearbeitet wurde, die Programmausführung nach dem „break“-Befehl
wieder fortgesetzt wird! Neu und noch ungewohnt ist dabei die
Erfahrung, dass sich das Ganze innerhalb der inneren, kleinen „while
booleanSwitch == True“-Schleife abspielt und zwar in
Abhängigkeit der booleschen Umschalt-Variablen
„booleanSwitch“ mit dem Wahrheitswert „true“
(= zutreffend) oder „false“ (= unzutreffend). Dabei
wird dann je nach dem booleschen Wahrheitswert entweder die Laufschrift „First!“ oder „Second!“
im „5 x 5
LED-Matrix“-Display angezeigt! Das Besondere
dabei ist also, dass sich beide Laufschriften niemals zusammen, d.h. nacheinander
anzeigen lassen!
Aber ist es wirklich der „break“-Befehl, der die beiden
Laufschriften
voneinander trennt, sodass sich diese niemals zusammen, d.h. nacheinander
anzeigen lassen? Sie können sich die Frage selbst beantworten,
indem Sie das Programm „microbit_teil_04_prog_16.hex“
mit dem Quelltext „microbit_teil_04_prog_16.py“
selbst ausprobieren:
(Bild 23 -
Programmspaltung auch ohne „break“-Befehl) Wenn Sie das obenstehende Programm starten,
dann erscheint nach der Laufschrift „Start …“ die nächste Laufschriftanzeige „First!“. Dabei
werden dann die nachfolgenden Programmzeilen pin0.write_digital(1) sleep(20) pin0.write_digital(0) sleep(480) display.scroll("Second!") wider Erwarten nicht abgearbeitet und
angezeigt, blinkt keine rote LED, wird auch zum Schluss die Laufschrift „Second!“
nicht angezeigt! Ändern Sie als Nächstes im obenstehenden
Programm die Programmzeile 33 while booleanSwitch == ab auf while booleanSwitch == False:. Kompilieren Sie den geänderten Programmkode neu, sodass eine neue,
hexadezimale Programmdatei
(= kompilierter Maschinenkode) entsteht, spielen Sie diese auf den „micro:bit“-Rechner,
und flashen Sie den Inhalt in den Arbeitsspeicher. Nach etwa 20 Sekunden startet das geänderte
und neu kompilierte Programm, sodass die Laufschriftanzeige „ Start …“
erscheint. Nach dem Programmstart und der Laufschriftanzeige „ Start …“
blinkt die rote
LED ein einziges Mal kurz auf, sodass gleich darauf die neue
Laufschriftanzeige „Second!“ in der inneren, kleinen „while
booleanSwitch == True“-Schleife angezeigt wird (siehe Programm „microbit_teil_04_prog_17.hex“
mit dem Quelltext „microbit_teil_04_prog_17.py“).
Jetzt steht unwiderruflich fest, dass die unterschiedliche
Laufschriftanzeige
sowie das einzelne Aufblitzen der roten LED nicht vom „break“-Befehl abhängt, weil es diesen in der inneren, kleinen „while
booleanSwitch == True oder False“-Schleife nicht mehr gibt! So jetzt haben wir durch Experimentieren,
durch Versuch und Irrtum eine ganze Menge gelernt, ohne aber das Problem
wirklich gelöst zu haben. Schließlich beschränken sich die Kommunikationsmöglichkeiten
des „mini:bit“-Rechners
auf das „5 x 5
LED-Matrix“-Display, die beiden Taster A und B sowie die Ports „Pin P0“ bis „Pin P2“,
sofern an diese externe Gerätschaften wie z.B. die rote LED angeschlossen wurden. Wie also soll sich der Anwender verhalten, wenn die rote LED
plötzlich anfängt hektisch zu blinken, um auf diese Weise zu signalisieren,
dass eine Störung
vorliegt, ein Signalpegel
überschritten oder ein stiller Alarm ausgelöst wurde? Da wäre es schon sehr
hilfreich, wenn eine permanente Laufschrift dem Anwender mitteilen würde, um was
es geht, weshalb die rote LED so heftig blinkt! Aber genau das ist
uns ja bisher noch nicht gelungen, dass der Anwender parallel zur
blinkenden, roten
LED mittels periodisch wiederkehrender Laufschrift eingehender
über ein entsprechendes Vorkommnis informiert wird. Und was ist
der Grund dafür, dass uns das bisher noch nicht gelungen ist? Ganz einfach, weil es sich bei dem Statement display.scroll("Text …“)
in Wirklichkeit um eine „Untermenge“ eines wesentlich umfangreicheren Befehls
mit insgesamt bis zu vier Parametern handelt: display.scroll(string, delay=150, *, wait=True,
loop=False, monospace=False)
(Bild 24 –
„display.scroll()“ in aller Ausführlichkeit) Nachfolgend die entsprechende Übersetzung
ins Deutsche mit Google Translate:
(Bild 25 –
„display.scroll()“ ins Deutsche übersetzt) Von der „BBC
micro:bit“ gibt es das obenstehende Tutorial
zur Programmiersprache „MicroPython“, das ganz gut zu sein scheint. - Was sagte der Dorfpolizist Anfang des 19. Jahrhunderts
zum Bauern in dessen Haus und Hof eingebrochen wurde? „Wenn wir wüssten wie
der Dieb heißt und wo er wohnt, dann hätten wir ihn schon!“. Wenn Sie
kulturell gebildeter sind, dann halten Sie es mit Sokrates,
der einmal sinngemäß gesagt haben soll: „Ich weiß, dass ich nichts weiß!“. Heutzutage spricht man auch von der
Halbwertszeit des Wissens, also der Zeitspanne in der Wissen veraltet, nicht
mehr aktuell ist und das im Alltag und Beruf nicht mehr von Nutzen ist. Und
die wird immer kürzer, sodass man einen in der frühen Jugend erlernten Beruf
ohne das lebenslange Lernen ab Mitte/Ende Vierzig nicht mehr ausüben kann.
Vielleicht aber auch deshalb, weil es den erlernten Beruf bis dahin nicht
mehr gibt. Wenn man also weiß, wie die Dinge
funktionieren, dann verlieren sie ihren Schrecken, werden sie plötzlich ganz
leicht, leicht verständlich. Im vorliegenden Fall bei der Python-Programmierung
kann man als Newcomer
nicht alles wissen, muss man auch nicht alles wissen! Man muss nur wissen, wo
es steht! Oder man muss jemanden kennen, der sich auskennt, der weiß wie es
geht (siehe Programm „microbit_teil_04_prog_18.hex“
mit dem Quelltext „microbit_teil_04_prog_18.py“):
(Bild 26 –Laufschrift
und blinkende LED gleichzeitig) Die Bedienung des obenstehenden Programms ist
wegen der beiden Abfragen, ob der Taster A gedrückt wurde etwas
trickreich. Demzufolge muss man beim Umschalten von „… on“ auf „… off“ den richtigen Zeitpunkt
erwischen. Außerdem lässt sich das Programm durch Drücken des Tasters B
nur dann abschalten und runterfahren, wenn es sich zuvor im Modus „… on“
befindet. Damit man später noch weiß, wie das Programm
bedient werden muss, nachfolgend noch die Bedienungsanleitung
zum Programm
„microbit_teil_04_prog_18.hex“
mit dem Quelltext „microbit_teil_04_prog_18.py“
1. Starten und Ausführen des Programms Das in
den Arbeitsspeicher
des
„micro:bit“-Rechners geflashte Programm startet sich nach etwa 20 Sekunden
von allein und zeigt im Display die programmierte Laufschrift „Start ...“ an. Nachdem
die Laufschrift
durchgelaufen
ist, bleibt das Display zwar dunkel, aber das
Programm
mit den
zwei
Tastern A und B
weiterhin
aktiv. 2. Taster A zum Einschalten des Blinklichts Nach
dem selbständigen Programmstart befindet sich das Programm im
Grundmodus bei dem nur der Taster A fortwährend auf einen
eventuellen Tastendruck
hin abgefragt
wird. Drückt
man nun auf den Taster A, so kommt es auf die Länge der
Zeitdauer des Drückens des Tasters an, ob die rote LED
ein- oder ausgeschaltet wird. Wenn dabei die Laufschrift in den Modus, d.h. in
die Anzeige „…
off“ wechselt, dann muss man den Taster
A ein weiteres Mal drücken, um in die Anzeige „… on“ zu wechseln. Das Umschalten
mittels des Tasters A gelingt am
besten, wenn man den richtigen Zeitpunkt abpasst. Dieser ist dann gegeben, wenn
die Laufschrift
mit den drei Punkten „… on“ oder „… off“
exakt beim zweiten
Punkt „..“ angekommen ist! Das Abpassen dieses Zeitpunkts
gelingt am besten wenn man den Tasters A
länger gedrückt hält und erst wieder loslässt, wenn der zweite
Punkt „..“ der Laufschrift
erscheint. 3. Taster A zum
Ausschalten des Blinklichts Das Blinklicht
mit der roten LED
wurde so
programmiert, dass es sich mit nur einem Taster und zwar dem Taster A als Wechselschalter ein- und
ausschalten lässt. Dabei erfolgt die Bedienung des Tasters
A wie in Punkt 2.) beschrieben!
4. Taster B
zum Beenden des Programms Das Programm
selbst lässt sich nur beenden, wenn es sich im Modus mit der Anzeige „…on“ befindet! Demzufolge
könnte es also sein, dass man zum Beenden des Programms erst einmal vom Modus „… off“
in „… on“
wechseln muss. Wie das geht, ist im Punkt 2.)
ausführlich beschrieben. 5. Mit dem „Reset“-Taster
alles wieder auf Anfang setzen Auf der Rückseite des „micro:bit“-Rechners befindet sich ein sogenannter „Reset“-Taster mit dem
sich der Rechner neu starten lässt. Dabei wird auch das zuvor
in den Arbeitsspeicher geflashte Programm wieder neu
gestartet, sodass sich dieses wieder im zuvor beschriebenen Grundmodus
befindet! - Wie
man anhand der Bedienungsanleitung sieht, ist die Bedienung des roten LED-Blinklichts
mit nur einem Taster als Umschalter leider nicht intuitiv möglich.
Der Grund dafür ist der, dass sich zwei ineinander geschachtelte „while“-Schleifen
nebst Tasterbedienung
als logisch komplex erweist. Deshalb
werden wir solche Dinge später bei der objektorientierten Programmierung
mit Python
programmieren, sodass sich dann auch die Bedienung intuitiv vornehmen lässt. - 4.
Dezimal
Erbsen zählen
Als
Erbsenzähler bezeichnet
einen Menschen, der im Leben ziemlich kleinlich ist, alles überprüft, ob es
ihm auch zum Vorteil gereicht und nichts ohne Gegenleistung herausrückt. Wir
wollen nachfolgend herausfinden, ob sich mit dem „micro:bit“-Rechner auch Erbsen
zählen lassen. Und zwar auf’s Komma genau. Aber macht das überhaupt Sinn,
Erbsen bis auf drei Nachkommastellen zu berechnen? Schließlich interessieren
den Koch, wenn er eine herzhafte Erbensuppe mit Schickenspeckwürfeln kocht,
nur die ganzen Erbsen und nicht die zerbröselten Erbenstückchen, die nur ein
paar Milligramm wiegen. Aber
es könnte ja sein, dass die herzhafte Erbsensuppe mit Geschmacksverstärker
als Tütensuppe kreiert werden soll. Mit gefriergetrockneten, zuvor
zerkleinerten Erbsenstückchen, die fein dosiert der Tütensuppe beigemischt
werden, wo die Zutaten dann weniger wiegen als ein Standardbrief
(= 20 Gramm) der Deutschen Post AG für derzeit 70 Eurocent/Brief. Für
die herzhafte Erbsensuppe als Tütensuppe bräuchten wird dann tatsächlich eine
Feinwaage nebst „micro:bit“-Rechner für das gewichtsmäßige
Umrechnen der Zutaten im Gramm- und Milligrammbereich. Obwohl, wenn man zu
Hause eine herzhafte Erbsensuppe kochen will, dann würde man die Erbsen nicht
zählen sondern in einem Gefäß auf der Waage wiegen. Wie
man sieht, öffnet sich beim Thema „Messen, wiegen, zählen“ ein riesiges
Anwendungsgebiet für Mikrocontroller und für den „micro:bit“-Rechner, da sich
dieser programmieren lässt. Dazu müsste man dann aber wissen, ob sich mit dem
„micro:bit“-Rechner
auch tatsächlich dezimal,
d.h. mit Nachkommastellen,
rechnen lässt. Eigentlich
sollte das der Fall sein. Schließlich gibt es einfache Taschenrechner, die
die vier Grundrechenarten und auch das Quadrieren nebst Quadratwurzelrechnen
beherrschen, für um die fünf Euro. Insofern kann man eigentlich erwarten,
dass der „micro:bit“-Rechner
tatsächlich über einen integrierten Rechenknecht verfügt, sodass sich mit
diesem auch dezimal rechnen lässt. Eigentlich! Und uneigentlich? Uneigentlich
wissen wir noch nicht, ob der „micro:bit“-Rechner tatsächlich über eine
arithmetische Recheneinheit, engl. ALU = „Arithmetic
Logic Unit“ verfügt oder nicht. Wenn
Sie den Link anklicken und den Wikipedia-Artikel lesen, dann wissen Sie, dass
jeder Prozessor über eine ALU verfügt, verfügen muss, damit er über den
Adress-, Daten- und Steuerbus mit dem angeschlossenen Arbeitsspeicher (ROM = engl. „read
only memory“ = Nur-Lese-Speicher, RAM = engl.
„random access memory“ = frei wählbarer Schreib- und Lese-Speicher)
kommunizieren, Daten austauschen und Programme ausführen kann. Aber lässt mit
der ALU auch dezimal wie bei einem Taschenrechner rechnen? >>
Alle ALUs verarbeiten Festkommazahlen. Gleitkommabefehle sind in vielen
aktuellen CPUs mittlerweile Standard. Ausnahmen sind kleinere
Mikrocontroller, die auf geringe Stromaufnahme oder auf geringe Herstellkosten getrimmt sind. << (Quelle: Wikipedia)
Jetzt
sind wir also fast genauso schlau wie vorher. Zwar wissen wir jetzt, dass Prozessoren nicht
ohne die ALU
auskommen, aber immer noch nicht, ob sich mit dem „micro:bit“-Rechner auch dezimal
rechnen lässt. Wenn
Sie wie im Teil 3 dieses Tutorials
mit JavaScript
programmiert und versucht haben mit Dezimalzahlen zu rechnen, dann wissen Sie
bereits, dass das wider Erwarten nicht geht. Aber das muss jetzt nicht
zwangsläufig bedeuten, dass das am „micro:bit“-Rechner liegt. Schließlich sind Hardware
und Software zwei
verschiedene Dinge. Demzufolge könnte man auch sagen, dass die Software
immer nur das kann, wozu die Hardware in der Lage ist bzw. in die Lage
versetzt wurde. Dass
man beim „micro:bit“-Rechner
mit JavaScript
wider Erwarten nicht dezimal rechnen und programmieren kann, dürfte
dann wohl daran liegen, dass das dezimale Rechnen in JavaScript
des „micro:bit“-Rechners
noch nicht implemeniert ist! Wenn
aber die Software
bestimmte Dinge nicht oder noch nicht kann, dann bedeutet dies nicht
automatisch, dass es an der Hardware liegt. Hier der Beweis:
(Bild 27 – durch
Zufall entdeckt, die serielle Schnittstelle) Wie
man im obenstehenden Bild sieht, gibt es nämlich eine serielle Schnittstelle mittels der
man kommunizieren und Daten austauschen kann. >>
Bei dem Programm wird der der Lichtwert von der Funktion input.lightLevel()
zurückgegeben. Der Wert wird dann als Dezimalwert die über die serielle Schnittstelle mit der
Funktion serial.writeNumber() ausgegeben. Danach wird noch ein Zeilenvorschub
mit der Funktion serial.writeLine("") gesendet. << (Quelle: „Robotfreak Blog“ – Robotik,
Elektronik, Arduino und mehr von Peter Recktenwald, Berlin) So
jetzt steht es fest, dass sich mit dem engl. „Programming Experience Toolkit“, kurz
dem PXT-Entwicklungswerkzeug
für Blockbefehle
und dem JavaScript-Compiler
von Microsoft für den „micro:bit“-Rechner im Moment noch keine Dezimalwerte
berechnen, sich aber sehr wohl über die serielle Schnittstelle übertragen lassen. Wer
seinen „micro:bit“-Rechner
mit dem „Micro-USB
2.0“-Kabel an eine der „USB 2.0“-Buchsen seines Windows-PCs angeschlossen hat,
sodass dieser in das Windows-Dateisystem als eigenständiges USB-Laufwerk
eingebunden wird, der kann sich mit dem Google Chrome-Browser oder
dem kompatiblen „Vivaldi“-Browser
die seriell übertragenen Daten auch in einem kleinen Fenster
(siehe roter
Kasten) direkt anzeigen und per Mausklick auch als sogenannte „CSV“-Textdatei
in den Download-Ordner
des heimischen Windows-PCs herunterladen:
(Bild 28 – Daten
mittels serieller Schnittstelle übertragen) Damit
sich die seriell übertragenen Daten aber im Google Chrome kompatiblen „Vivaldi“-Browser
und dem von Microsoft entwickelten PXT-Entwicklungswerkzeug anzeigen und
herunterladen lassen, muss man zuvor noch einen entsprechender Treiber
herunterladen und installieren. Konkret
handelt es sich dabei um den „mbed Windows serial port driver“, den man sich
hier von der Webseite
kostenlos herunterladen kann. Unter Windows 10 ist es angeblich nicht erforderlich,
den seriellen „mbed“-Treiber zu installieren. Aber es schadet
nicht, wenn man es trotzdem macht. Wenn
man sich die aufgezeichneten, seriellen Daten des obigen Helligkeitssensoren-Programms
heruntergeladen hat, so lassen sich diese in der Textdatei „data.csv“ mit einem
herkömmlichen Editor
wie folgt anzeigen:
(Bild 29 – Die
abgespeicherten seriellen Daten) Wie
man im obenstehenden Bild sieht, gibt es insgesamt nur zwei Spalten
mit Daten. Dabei steht in der linken Spalte die während der
Aufzeichnung verstrichene Zeit in Sekunden, während in der rechten
Spalte die Helligkeitswerte
einer der als Helligkeitssensor geschalteten LEDs
des „5 x 5
Matrix LED“-Displays stehen. Dabei arbeitet die in der Mitte des
Displays befindliche LED im Sperrbereich quasi als
lichtempfindliche Fotodiode.
Wie
man in der rechten Spalte der Helligkeitswerte sieht, handelt es sich bei aufgezeichneten
Werten um ganzzahlige Werte im Messbereich von 0 bis 255, wobei eine Übersteuerung
bereits bei Werten unter 255 einsetzt. Wie
man sieht, werden also nur die verstrichenen Millisekunden bei der
Messwertaufnahme dezimal erfasst, während die Helligkeitswerte unterhalb von 255
liegen und mit einer Auflösung von nur 8 Bit = 1111 11112 erfasst
werden. Das ist nicht viel, dürfte aber für das Erfassen und Reagieren auf Helligkeitsschwankungen
voll und ganz ausreichen. Jetzt
bleibt noch zu klären, um welche serielle Schnittstelle es sich beim „micro:bit“-Rechner
handelt. Dass es eine serielle Schnittstelle gibt, dürfte inzwischen
unstrittig sein und dem Umstand geschuldet sein, dass der „micro:bit“-Rechner
über das „Micro-USB
2.0“-Kabel mit Strom, Programmen und Daten versorgt wird. Dass es
sich bei der seriellen
Schnittstelle nicht mehr um die nur von früher bekannte „RS-232“-Schnittstelle,
wie man sie von älteren PCs und Notebooks her kennt, handelt, dürft
auch klar sein. Diejenigen,
die sich bereits hier und da mit neueren Peripheriegeräten oder neuerer Hardware
befasst haben, wissen, dass es sich bei der seriellen Schnittstelle nur um
eine „UART“-Schnittstelle,
d.h. engl. „Universal
Asynchronous Receiver Transmitter“ handeln kann, die auch im
Datenblatt „nRF51822“
des „Nordic
Semiconductor“-Herstellers genannt wird:
(Bild 30 – Die
serielle UART-Schnittstelle) >> Damit
UART-Baugruppen kommunizieren können, müssen RX der einen und TX der anderen
Baugruppe am Stecker gegenüberstehen. Damit sind stets zwei
Steckerbelegungstypen (Master und Slave) erforderlich, auch wenn die Geräte
vollkommen gleichberechtigt kommunizieren. Sollen Master mit Master oder
Slave mit Slave kommunizieren können, sind Kreuzverbinder (analog dem
Null-Modem-Kabel der seriellen Schnittstelle oder dem Cross-Over-Kabel des
Ethernet) erforderlich. Eine Modifikation, die
Single-Wire UART (SWART) vermeidet dieses Verpolungsproblem. Werden RX und TX
zusammen auf einem Pin vereint, ist zwar nur eine Simplex-Übertragung möglich,
dafür aber können dann beliebige Module miteinander kommunizieren. Es können
sogar mehrere UART-Module auf einem Draht kommunizieren (SWART-Bus). Die
SWART ist insbesondere für kurze Entfernungen und für Datenraten bis 115.200
Baud geeignet. << (Quelle: Wikipedia) Dabei bedeutet die im Bild stehende Bezeichnung „CTS“,
engl. „clear
to send“, d.h. „bereit zum senden” von Daten und „RTS“, engl. „request to send“, d.h. „bitte
(Daten) senden“, „Aufforderung Daten zu senden“. >> Die asynchrone Übertragung findet in
der Datenkommunikation bei der RS-232-Schnittstelle Verwendung. Diese
Schnittstelle weist eine vergleichsweise große Verbreitung auf. Ein UART
erzeugt die auf der RS-232-Schnittstelle zu übertragenden Datenbits und den
dazu notwendigen Datenrahmen. Die eigentliche RS-232-Schnittstelle besteht
zusätzlich noch aus Pegelumsetzern und weiteren Bauelementen wie
Steckern, welche nicht mehr Teil eines UART sind. Realisiert wird ein UART meist als
Kommunikationsbaustein in Mikrocontrollern
oder Computern,
als eigenständige integrierte Schaltung, als Teilfunktion
in Chipsätzen,
in Form von Hardwarebeschreibungssprachen für die Integration
in Field Programmable Gate Arrays
(FPGAs) oder als sogenanntes „Software-UART“, das nur durch eine
Programmabfolge vorliegt und bestimmte Ein-/Ausgabepins direkt ansteuert (Bit-Banging).
Die zu übertragenden bzw. die empfangenen Daten werden an das UART meist in
paralleler Form, beispielsweise über einen CPU-externen Bus, geliefert. Die Geschichte des UART ist eng verbunden mit
der Standardisierung der Datenkommunikation der RS-232. Waren die ersten
UARTs für Datenübertragungsraten weniger hundert Bit/s und den
Anschluss an Teletypes mit Stromschnittstelle oder Modems vorgesehen,
so erreichten sie in späteren Jahren als eigenständige Chips mehrere Megabit
pro Sekunde. << (Quelle: Wikipedia)
Falls
Sie in Ihrer PC-Bastelkiste ein überzähliges oder älteres USB-Drucker-
oder USB-Modem-Kabel
vom Typ „USB
2 Standard-B“ übrig haben, dann können Sie den „USB 2 Standard-B“-Stecker
abschneiden, die innen liegenden Kabelenden auftrennen und abisolieren,
sodass die Anschlussdrähte
offen zugänglich sind. Dabei
verhält es sich bei dem von mir verwendeten Kabel so, dass am anderen Ende
insgesamt vier Anschlussdrähte in den Farben rot, schwarz,
weiß
und grün
plus Abschirmung zum Vorschein
kommen. Diesbezüglich
handelt es sich bei dem roten und schwarzen Kabel um die
Stromversorgung,
während das weiße
und grüne
Kabel der Datenübertragung dient. Dabei
verhält es sich so, dass die beiden Datenübertragungsdrähte weiß
und grün
noch den schwarzen Draht als gemeinsamen Masseanschluss
benötigen bzw. sich die Masse mit diesem teilen! Weitere
Infos zur UART,
deren Funktionen nebst Statements finden sich auf der Homepage der BBC
micro:bit MicroPython. - So,
jetzt haben wir wieder eine ganze Menge gelernt und wissen bereits jetzt,
dass sich mittels der „UART“-Schnittstelle Daten seriell über das „Micro-USB 2.0“-Kabel
übertragen lassen. Beispielsweise auch zwischen zwei „micro:bit“-Rechnern!
Das
alles wurde aber nur möglich, weil wir bestimmte, zunächst unbekannte Dinge
und Phänomene kritisch hinterfragen, recherchieren, erforschen und
ausprobieren. „Dumm zu fragen“ lohnt sich also, sollte man sich nicht
verbieten lassen! Doch
nun wird es wieder Zeit, in Python zu programmieren und den Umgang mit Dezimalzahlen
zu üben (siehe Programm „microbit_teil_04_prog_19.hex“
mit dem Quelltext „microbit_teil_04_prog_19.py“):
(Bild 31 – Mit
dezimalen Zahlen rechnen) Das
Umwandeln
der numerischen Variablen „summe_dez_zahlen“ in die String-Variable „string_dez_zahlen“
lässt sich auch wie folgt einsparen:
(Bild 32 – Noch
professioneller dezimal rechnen) 4.1 Smiley
oder Grumpy?
Es
ist kaum zu glauben, aber amtlich! Jetzt gibt es die „Grumpy Cat“ schon in Wikipedia! Und auf dem „micro:bit“-Rechner:
(Bild 33 – Grumpy Cat) Grumpy
oder Smiley, das ist hier die Frage:
(Bild 34 – Smiley Cat) Selbstverständlich
lässt sich die „Grumpy Cat“ auch programmieren. Und auch das Umschalten auf
die „Smiley Cat“. Im nachfolgenden Programm
„microbit_teil_04_prog_21.hex“
mit dem Quelltext „microbit_teil_04_prog_21.py“
benutzen wir den großen Rundanschluss
Port „Pin P0“ als Sensor, der auf die Berührung
mit dem Finger
reagiert und das „Grumpy Cat“ zum „Smiley Cat“ werden lässt. Ganz ohne
Leckerlies:
(Bild 35 – Programm
zum „Grumpy Cat“) Am
besten aber funktioniert der Sensor, wenn man am Port „Pin P0“ einen etwa 10 cm
langen Draht anschließt, diesen am Ende ausreichend lang abisoliert und mit
den Fingern der linken Hand festhält. Ein
zweiter, ebenfalls etwa 10 cm langer Draht wird am einen Ende mit dem Masseanschluss
am Port „Pin
GND“ des „micro:bit“-Rechners verbunden, am anderen Ende
ausreichend lang abisoliert und mit den Fingern der rechten Hand
festgehalten, sodass der menschliche Körper mit der rechten Hand auf Massepotential
liegt und mit der linken Hand mit dem Sensor verbunden ist. Dabei wirkt
dann der menschliche Körper wegen seiner großen Oberfläche als Antenne,
nimmt die im Raum herrschenden elektro-magnetischen Felder nebst Strahlung (=
Elektrosmog) auf und leitet
diese als elektrische Körperspannung im Millivolt- und
Mikroampere-Bereich (= mV = 10-3 V, = µA = 10-6 A) an
den Sensor
weiter, sodass sich das „Grumpy Cat“ zum „Smiley Cat“ verwandelt. Wenn
man sich aber mit dem „micro:bit“-Rechner in einem elektro-magnetisch abgeschirmten
Raum befinden würde, im Winter auch noch eine ziemlich trockene Haut hätte
und Winterstiefel mit Gummisohlen an hätte, dann würde der Sensor
nicht funktionieren, weil u.a. der Körperstrom wegen des großen
Hautwiderstandes
zu gering wäre und der menschliche Körper wegen der fehlenden
elektro-magnetischen Strahlung auch nicht als Antenne arbeiten würde. Damit
der Sensor
aber trotz fehlenden Elektrosmogs zuverlässig funktioniert und man
seine elektronische, Sensor unterstütze Nachttischlampe mittels leichter
Berührung mit der Hand oder den Fingern ein- oder ausschalten kann, muss man
etwas nachhelfen und für einen künstlichen Elektrosmog sorgen, der von der
Nachttischlampe bzw. unserem Sensor am Port
„Pin P0“ produziert wird, indem man den Sensor
und mit ihm dann auch den Anwender im Falle der Berührung „unter Strom“ setzt. Im
vorliegenden Fall könnte dabei dann die Spannung am Sensor entsprechend der Versorgungsspannung
am Rundanschluss „Pin 3V“ bis zu „gefährlichen“ 3 Volt betragen.
Der Strom, der dann vom Sensor am Port
„Pin P0“ vom linken Arm über den Körper
zum rechten Arm gegen Masse fließt, würde dann aber nur wenige Mikroampere (=
10-6 A) betragen und wäre damit vollkommen ungefährlich! Wenn
wir jetzt herausfinden wollen, wie der Sensor wirklich funktioniert, dann müssen wir
diesen näher untersuchen und für kontrollierte, d.h. berechenbare und
jederzeit nachvollziehbare, d.h. replizierbare Bedingungen sorgen. Zu
diesem Zweck basteln wir uns einen sogenannten Spannungsteiler, der
aus einer roten
LED, einem Vorwiderstand RV = 100 Ω, die beide in Reihe
geschaltet sind, besteht und an der Spannung von U3V = 3,17 V betrieben
wird. Dabei nutzen wir die Stromversorgung am Rundanschluss „U3V“ (=
Pluspol) sowie dem Rundanschluss „GND“ (= Minuspol, Masse):
(Bild 36 – Schaltung
zum „Grumpy Cat“) Nach
dem Ohmschen Gesetz
berechnet sich der Spannungsabfall URV am Vorwiderstand RV
wie folgt: U = I * R → URV = I * RV
= 9 mA * 100 Ω = 9 * 10-3 A * 100 V/A = 900 * 10-3
A = 900 mV = 0,9
V Berechnen wir nun noch
den Spannungsabfall
an der roten
LED, ULED = U3V
- URV = 3,17 V - 0,9 V = 2,27 V dann
sieht man, dass an dieser die größere Spannung mit ULED = 2,27 V anliegt, sodass diese ziemlich hell leuchtet und dabei
über die elektrische (Licht-) Leistung PLED wie folgt verfügt: PLED = ULED
* I
= 3,52 V * 9 mA = 31,68 mW Auch
wenn die Kennlinie
der LED im Durchlassbereich
praktisch geradlinig verläuft und man die elektrische Leistung PLED
der LED
herkömmlich linear berechnen kann, heißt das nicht zwangsläufig, dass sich
auch die Helligkeit
linear im selben Verhältnis zu Spannung oder Strom steigern lässt. Wie
Sie bereits wissen, verfügt der „micro:bit“-Rechner in der Hauptsache über drei
große Rundanschlüsse Port „Pin P0“ bis „Pin P2“, die sich frei als analoge
oder digitale Ein- oder Ausgänge durch Programmieren konfigurieren
lassen. Gemäß
dem obenstehenden Programm „microbit_teil_04_prog_21.hex“
mit dem Quelltext „microbit_teil_04_prog_21.py“
reagiert dabei der Sensor, d.h. der Anschluss am Port „Pin P0“,
auf Berührung,
indem ein Stromkreis
vom Sensor
gegen Masse
über den menschlichen Körper gebildet wird. Wie aber der Sensor tatsächlich im Detail
funktioniert, wissen wir noch nicht. So wissen wir noch nicht, ob der Sensor
kurzschlussfest ist, was also passiert, wenn man den Sensoranschluss
auf Masse
(= Pin „GND“), d.h. Minuspotential legt. Auch wissen wir nicht, ob
er die Stromversorgung
belastet und einen größeren Strom zieht, wenn wir den Sensor (=
Port „Pin P0“) mit dem Pluspol
am Rundanschluss „Pin 3V“verbinden. Geht dann die Spannungsversorgung
in Knie, d.h. bricht sie zusammen, sodass die rote LED ausgeht? Da
der Sensor
elektrisch recht empfindlich ist und auf kleine Körperströme
reagiert, indem sich der „Grumpy Cat“ zum „Smiley Cat“ verwandelt, dürfte der
Sensor
nicht nur über eine hohe Verstärkung B für Gleichstrom ( oder β für
Wechselstrom), sondern auch über einen hohen Eingangs- bzw. Innenwiderstand Ri
verfügen, da ja bei Kontakt nur ein ganz kleiner Kontakt- bzw. Körperstrom von wenigen Mikroampere µA
(= 10-6 A) fließt. Dabei
bedeutet die Größenordnung 10-6 A für den winzig kleinen Kontakt-
bzw. Körperstrom,
dass der damit verbundene Eingangs- bzw. Innenwiderstand Ri in
der Größenordnung 106 Ω, d.h. deutlich > 100 KΩ und
< 10 MΩ sein dürfte. Dazu muss man wissen, dass alle drei Ports „Pin P0“
bis „Pin P2“,
egal wie sie beschaltet werden, praktisch kurzschlussfest sind. Aber
nur, wenn der „micro:bit“-Rechner
über das „Micro
USB 2.0“-Kabel z.B. über den USB-Anschluss des PCs, des Notebooks
oder ein USB-Steckernetzteil, mit Strom versorgt wird.
Bei der Stromversorgung über die Batterie-Anschlussbuchse durch ein
extern angeschlossenes Batteriepack von zwei AA oder AAA Batterien à
1,5 Volt gibt es keine Kurzschlusssicherung! Ferner
verhält es sich so, aber das können Sie noch nicht wissen, dass alle Ports „Pin P0“
bis „Pin P2“
eingangsseitig über einen Widerstand von RA/D = 10 MΩ auf Pluspotential
von maximal U3V = 3,3 V liegen! Der
Grund dafür dürfte der sein, dass man auf diese Weise durch den erzwungenen Spannungsabfall
am hochohmigen (Offset-) Widerstadt RA/D ( = kein
Eingangswiderstand) auf diesen reagieren und die (Kurzschluss-) Strombegrenzung
durch Abschalten
realisieren kann! Auf
diesen Zusammenhang wurde ich auch erst durch das Kompendium „Micro:bit Praktikum“
von Burkhard Kainka, erschienen als
eBook bei Amazon,
aufmerksam. Dort heißt es im Kapitel 4 „Analoge Messungen“: >>
Kann es sein, dass der offene Eingang schon eine Spannung hat? Wenn ein
Digital-Multimeter in Reichweite ist, kann man es ja einfach mal zwischen P0
und GND anschließen. Es zeigt dann zum Beispiel 1,7 V. Warum das so ist, muss
noch untersucht werden. << Weitere,
detaillierte Untersuchungen zu diesem Sachverhalt der quasi Offset-Spannung
finden sich hier im Tutorial im Teil
3, Abschnitt „3.8.4 A/D-Wandler mit Spannungsteiler“. Wenn
man also davon ausgeht, dass die Spannung am Sensor durch die Stromversorgung am Pin „3V“
maximal bis zu 3,3 V betragen kann, dann lässt sich die Stromstärke ISensor,
d.h. der aus dem Port „Pin P0“ heraus fließende, winzige Strom
näherungsweise wie folgt berechnen: ISensor = USensor
/ Ri = U3V / Ri = 3,17 V / 10 MΩ = 3,17 V / ( 10 * 106
Ω
) = 3, 17 V / ( 10 V/A ) * 10-6 = 0,317 * 10-6 A = 0,317 µA = 0,000 000 317 A ≈ 0,3 Millionstel Ampere Mit
einem Multimeter
lässt sich dieser winzig kleine Strom aber schon nicht mehr messen! Stattdessen lässt sich aber die Leerlaufspannung UPin P0 = 1,57 V am Port
„Pin P0“ des Sensors messen, sodass für die Stromstärke
des Sensors
folgt: IPin P0 = UPin
P0 / RPin P0 = 1,57 V / 10 MΩ = 1,57 V / ( 10 * 106
Ω
) = 1,57 V / ( 10 V/A ) * 10-6 = 0,157 * 10-6 A = 0,157 µA = 0,000 000 157 A ≈ 0,16 Millionstel Ampere Frage 1 Jetzt wissen wir, dass wir das Anschlusskabel
am Port „Pin P0“
des Sensors
gefahrlos mit der Spannungsversorgung am Pin „3V“ mit U3V = 3,17 V verbinden
können, ohne dass es einen Kurzschluss
gibt! Was
aber passiert mit dem „Grumpy Cat“? Wechselt dieser seinen
Gesichtsausdruck zum „Smiley Cat“? Probieren Sie es aus und begründen
Sie das Ergebnis! Als
Nächstes verbinden wir das Anschlusskabel am Port „Pin P0“ des Sensors
mit dem Spannungsteiler
und zwar genau in der Mitte, d.h. am Verbindungspunkt der roten LED mit dem Vorwiderstand RV
(siehe Bild 36 – Schaltung zum
„Grumpy Cat“). Was
passiert jetzt mit dem „Grumpy Cat“? Wechselt dieser jetzt endlich
seinen Gesichtsausdruck zum „Smiley Cat“? Finden Sie es heraus, indem Sie es
ausprobieren! Als
Letztes verbinden wir das Anschlusskabel am Port „Pin P0“ des Sensors
mit der Masse
(= Pin „GND“)
der „micro:bit“-Stromversorgung.
Was
passiert jetzt mit dem „Grumpy Cat“? Wechselt dieser jetzt seinen
Gesichtsausdruck zum „Smiley Cat“? Finden Sie es heraus, indem Sie es
ausprobieren! Jetzt
wo wir wissen, dass der Sensor am Port
„Pin P0“ einen winzig kleinen Ausgangsstrom
nach außen abgibt, wenn der Stromkreis gegen Masse (= Pin „GND“) der „micro:bit“-Stromversorgung
geschlossen wird, stellt sich die Frage, ab welcher Ausgangsspannung
der Sensor
reagiert und den „Grumpy Cat“ auf „Smiley Cat“ umschaltet. Finden
Sie heraus, ab welcher Ausgangsspannung der Sensor umschaltet und
begründen Sie Ihre Entscheidung bzw. Vermutung! - Wie wir bereits
wissen, lassen sich die drei Ports
„Pin P0“ bis „Pin P2“ wahlweise als analoger
oder digitaler Ein- oder Ausgang programmieren. Ferner wissen wir, dass am Sensor
von Port „Pin P0“
im unbelasteten Zustand eine Leerlaufspannung von UPin P0 = 1,57 V anliegt, sodass man vermuten darf, dass
der Sensor
beim Unterschreiten dieser Spannung vom „Grumpy Cat“ auf „Smiley Cat“ umschaltet. Um herauszufinden, dass dem wirklich so ist,
programmieren als Nächstes den Port „Pin P1“ als analoge Spannungsquelle,
die genau die Leerlaufspannung
von UPin P0 = 1,57 V
abgibt. Zu diesem Zweck müssen wir aber zuvor die analoge Leerlaufspannung
in einen entsprechenden binären Wert im Bereich von [ 0 … 10232 ] =
1024 verschiedene Spannungswerte wie folgt umrechnen: 10242 Bit / 3,17 V aktuelle
Betriebsspannung = 323,0284 Bit / Volt ≈ 323 Bit / Volt Gegenprobe: 323 Bit /
Volt * 3,17 V = 1023,91 ≈
1024
… was zu beweisen war! Jetzt
wo wir den Umrechnungsfaktor 323 Bit / Volt
berechnet haben, lässt sich der Binärwert zum Einstellen der Leerlaufspannung
von UPin P0 = 1,57 V
der analogen Spannungsquelle am Port „Pin P1“ ganz leicht wie
folgt berechnen: Binärwert
= 323 Bit /
Volt * 1,57 V = 507,11 ≈ 507 Bit Da
aber die Leerlaufspannung
bei einer äußeren Beschaltung nebst geringfügiger Belastung eben nicht
konstant ist, sondern in die Knie geht und sich entsprechend verringert,
messen wir die Spannung am Port „Pin P0“ des Sensors noch mal nach und stellen
dabei fest, dass sich diese nun auf den Wert UPin P0 = 1,28 V verringert hat. Demzufolge
müssen wir den Binärwert neu berechnen: Binärwert
= 323 Bit /
Volt * 1,28 V = 413,44 ≈ 413 Bit Wie
man anhand des Programm „microbit_teil_04_prog_22.hex“
mit dem Quelltext „microbit_teil_04_prog_22.py“
sieht, schaltet der „Grumpy Cat“ aber erst ab einem Binärwert 415
auf den „Smiley
Cat“ um:
(Bild 37 – Erweitertes
Programm zum „Grumpy Cat“) Wie
man im obenstehenden Programm sieht, lässt sich der „Grumpy Cat“ durch Anlegen einer analogen
Spannung
mittels des Bitwertes
von 415 Bit
an den Sensor
(= Port „Pin
P0“) zum Lächeln bewegen. Wenn auch nicht ganz freiwillig. Kleine
Spannungsimpulse auf den Hinterkopf erhöhen eben das Denkvermögen bzw. die
gute Laune und verbessern damit das Lächeln im Gesicht. Wenn
wir wissen wollen, um welchen Spannungswert es sich dabei handelt, dann müssen
wir den Bitwert 415 Bit nur mit dem Wert der aktuell anliegenden Spannungsversorgung
am Pin „3V“
mit U3V = 3,18 V wie folgt umrechnen: UPin P0 = U3V
/ 1024 Bit * 415 Bit = ( 3,18 V / 1024 Bit ) * 415 Bit = 0,00310546875 V/Bit * 415 Bit = 3,10547 mV/Bit * 415 Bit = 3,10547
mV/Bit * 415 Bit =
1288,77005 mV = 1,2888 V ≈ 1,29 V
( … gemessen: 1,28 V ) Für die Berechnung der A/D-Wandler-Bereichsgröße folgt: Wird der A/D-Wandler mit 10 Bit an 3,16 V betrieben, so folgt für die Umrechnungen: Bereichsbreite = Referenzspannung / (
Maximalwert + 1 ) = 3,18 V / ( 1023 + 1 ) Bit = 3,18 V / 1024 Bit = 0,0031055 V/Bit Siehe
auch Teil 3, Abschnitt
„3.8.5 Berechnung der A/D-Wandler-Bereichsgröße“ Wir wissen jetzt, dass
die Versorgungsspannung
des „micro:bit“-Rechners
über das „Micro
USB 2.0“-Verbindungskabel im Bereich von 4,75 V - 5,50 V bei einer maximalen
Stromentnahme
von bis zu 500
mA teils sehr unterschiedlich ausfallen kann, was sich natürlich auch auf
die interne Versorgungsspanung U3V am Pin „3V“
und Pin „GND“
(= Masse) entsprechend auswirkt! Demzufolge gilt es, diese stets bei Berechnungen entsprechend zu
berücksichtigen und mit einzubeziehen! Jetzt
wissen Sie auch, weshalb das manuelle Ermitteln des Bitwertes von 415 Bit am Sensor (= Port „Pin P0“), um den grimmigen „Grumpy Cat“
durch Anlegen einer analogen Spannung zum Lächeln zu bewegen, ziemlich
aufwendig ist. Höchste
Zeit also, diesen Vorgang zu automatisieren (siehe Programm „microbit_teil_04_prog_23.hex“
mit dem Quelltext „microbit_teil_04_prog_23.py“):
(Bild 38 –
Automatische Ermittlung des Bitwertes) Kernstück
des obenstehenden Programms ist die „while (i < i_stop + 1):“-Schleife, die von i_stop = 425
bis i_start = 400
rückwärts durchlaufen wird. Dabei
richtet sich der rückwärts zu durchlaufende „Stop-/Start“-Bereich mit seinen vorher
festgelegten „Stop-/Start“-Werten
nach dem voraussichtlich zu erwartenden Bitwert, damit sich dann später
beim rückwärtigen Schleifendurchlauf auch tatsächlich ein zutreffender
Bitwert
ermitteln lässt mit dem sich dann der „Grumpy Cat“ auf „Smiley Cat“ umschalten lässt. Da
wir im vorliegenden Fall einen Bitwert von 715 erwarten, macht es Sinn, den Wertebereich
für die Schleifendurchläufe entsprechend einzugrenzen, damit sich der
zutreffende Bitwert
schneller ermitteln lässt. Sollte
sich der zu erwartende Bitwert im eingegrenzten Intervall wider
Erwarten nicht finden lassen, dann muss man den Schleifenbereich nach oben
und/oder nach unten entsprechend vergrößern (siehe roter Kasten im obenstehenden
Bild). Wenn
Sie sich die jeweiligen Bitwerte in den Schleifendurchläufen anschauen und
anzeigen lassen wollen, dann müssen Sie nur im ·
Statement „display.scroll("i = " + str(i), delay = 80)“ das
Kommentarzeichen „#“ entfernen und das Programm neu kompilieren
(siehe grüner
Kasten im Bild oben). Mit
dem ·
Statement „pin1.write_analog(i)“ wird
die Ausgangsspannung
der programmierbaren Spannungsquelle am Port „Pin P1“ als Funktion
des Bitwertes
des Schleifenzählers i eingestellt und mittels Verbindungskabel dem Sensor
am Port „Pin
P0“ zugeführt (siehe blauer Kasten). Wenn
der entsprechende Bitwert, im vorliegenden Fall der Wert 417,
bei den Schleifendurchläufen ermittelt wurde, wird die Schleife sofort mittels „break“
abgebrochen und verlassen. Anschließend wird dann der ermittelte Bitwert
in der Laufschrift
nebst Wechsel vom „Grumpy Cat“ zum „Smiley Cat“ angezeigt. Die
Anzeige des ermittelten Bitwertes lässt sich später wieder als Laufschrift
nebst des „Smiley
Cat“ beliebig oft anzeigen, wenn man den Taster A betätigt (siehe roter Kasten
im nachfolgenden Bild):
(Bild 39 –Ermittelter
Bitwert wiederholt anzeigen) Durch
Betätigen des Tasters
B lässt sich die „while True:“-Endlosschleife wieder verlassen
und das Programm
wieder beenden. Berechnen
wir abschließend noch den zum Bitwert 417 zugehörigen Spannungswert, indem wir diesen
mit der aktuell anliegenden Spannungsversorgung am Pin „3V“ mit U3V = 3,16 V wie
folgt umrechnen: UPin P0 = U3V
/ 1024 Bit * 417 Bit = ( 3,16 V / 1024 Bit ) * 417 Bit = 0,0030859375 V/Bit * 417 Bit = 3,0859375 mV/Bit * 417 Bit = 3,08594 mV/Bit * 417 Bit =
1286,83698 mV = 1,287 V ≈ 1,29 V
( … gemessen: 1,28 V ) Hier geht es zu Antworten der Fragen 1
bis 4. - Bedienungsanleitung
zum Programm
„microbit_teil_04_prog_23.hex“
mit dem Quelltext „microbit_teil_04_prog_23.py“
1. Starten und Ausführen des Programms Das in
den Arbeitsspeicher
des
„micro:bit“-Rechners geflashte Programm
startet sich nach wenigen Sekunden von allein und zeigt im Display
die programmierte Laufschrift „Start ...“ an. Nach dem Programmstart zeigt
sich zunächst die „Grumpy Cat“ ( L ), die dann nach etwa 10 Sekunden zum „Smiley Cat“ ( J ) wechselt. Kurz darauf wird der ermittelte Bitwert
in der Laufschrift
angezeigt.
Das alles erfolgt aber nur in der
beschriebenen Weise, wenn sich vom Programm in der „while (i < i_stop + 1):“-Schleife
tatsächlich der erwartete Bitwert ermitteln ließ! 2. Taster A zum wiederholten Anzeigen des ermittelten
Bitwertes Nach
dem der erwartete Bitwert ermittelt wurde, lässt sich die Anzeige
des ermittelten Bitwertes nebst des „Smiley Cat“ ( J )
durch Drücken
des Tasters
A beliebig oft anzeigen. 3. Taster B
zum Beenden des Programms Nachdem
der ermittelte Bitwert in der Laufschrift und das „Smiley Cat“ ( J )
angezeigt wurden, lässt sich das Programm durch einmaliges Betätigen des Tasters B jederzeit wieder beenden. 4. Mit dem „Reset“-Taster
alles wieder auf Anfang setzen Auf der Rückseite des „micro:bit“-Rechners befindet sich ein sogenannter „Reset“-Taster mit dem sich der Rechner neu starten lässt. Dabei wird
dann auch das zuvor in den Arbeitsspeicher
geflashte Programm wieder neu
gestartet! - 4.2 Strom
mit Strom ausschalten
Häh?
Pardon, wie bitte. Wie bitte soll das denn funktionieren? Strom mit Strom
ausschalten? Das wäre ja fast so, wie wenn man Feuer mit Feuer löscht! Gibt’s
das wirklich? Geht das? Ja! Feuer lässt sich beispielsweise auch mit
Sprengstoff löschen. Mit viel Trinitrotoluol (=
TNT) sozusagen. Und, wenn sich Feuer mit Sprengstoff löschen lässt, dann
lässt es sich auch Feuer mit Feuer löschen! Bei
den Bohrfachleuten auf einer Bohrinsel, einer Erdöl- oder Erdgasförderstelle
in der Wüste ist der sogenannte „Blowout“
der absolute GAU (= Größter anzunehmender Unfall). Einen „Blowout“ nennt man
es, wenn sich das Erdöl oder Erdgas einer Förderstelle, d.h. eines Bohrturms
entzündet und explosionsartig verbrennt. In einem Bohrturm gefördertes Erdöl
oder Erdgas kann sich entzünden, wenn das Bohrgestänge aus dem Bohrloch
hochgezogen werden muss, weil z.B. der Bohrkopf oder ein Teil des Bohrgestänges
erneuert werden müssen. Durch den hohen Druck des Erdöls schießt dann eine
bis zu fünfzig Meter hohe Fontäne in die Luft, die sich im Falle eines
gefährlichen Erdöl- und Erdgasgemisches entzünden kann, Feuer fängt und den
ganzen Bohrturm in die Luft sprengt oder abfackelt. Bei
einem Blowout in der Wüste ließ sich die sich bis zu fünfzig Meter hohe
brennende Öl- und Gasfontäne nur durch die Druckwelle einer gewaltigen
Sprengung löschen, die die brennende Feuersäule quasi wegpustete und dem
Feuer den zur Verbrennung erforderlichen Sauerstoff entzog. Ähnlich
kann man kleinere oder größere Waldbrände bekämpfen und löschen. So lassen
sich im Extremfall örtlich begrenzte, größere Waldbrände und deren Feuerwalze
durch gezielte Gegenfeuer stoppen und bekämpfen. Einerseits in dem das
Gegenfeuer der nahenden Feuersbrunst keine Nahrung, d.h. Brennstoff mehr
liefert, da dieser bereits kurz zuvor absichtlich und gezielt geopfert, d.h.
verbrannt wurde. Und andererseits, indem man mit dem Gegenfeuer der nahenden
Feuerwalze eines Großfeuers den zur Verbrennung erforderlichen Sauerstoff
entzieht, weil dieser kurz zuvor vom Gegenfeuer verbraucht wurde. Und,
was hat nun das Gegenfeuer mit dem Strom zu tun? Ganz einfach! Man kann tatsächlich
mit Strom
den Strom
ausschalten. Präziser müsste man aber sagen, dass man mit einem Strom
einen anderen ausschalten kann. Streng genommen wird aber der andere
Strom
nicht wirklich ausgeschaltet, sondern einfach nur durch einen „Trick“ umgeleitet!
Dabei macht man sich die Eigenschaft des elektrischen Stromes zu Nutze,
nämlich dass sich dieser immer den Weg des geringsten Widerstandes sucht.
Und, das kann man tatsächlich wörtlich nehmen. Aber genau genommen geht es
bei der Stromumleitung
um das Schaffen und Ausnutzen bestimmter Spannungspotentiale. Aber im Prinzip
funktioniert das Ganze dann so wie bei dem Gegenfeuer! - Langer
Rede kurzer Sinn, wenden wir uns wieder dem „micro:bit“-Rechner zu. Nachfolgend
benutzen wir weiterhin die Reihenschaltung, die aus der roten LED
und dem Vorwiderstand
RV besteht (siehe Bild 36). Dabei wird der Vorwiderstand
mit RV = 100 Ω
zur Strombegrenzung
gebraucht, damit die rote LED im Durchlassbetrieb nicht
überlastet wird und durchbrennt. Aufgrund der Reihenschaltung werden beide
Verbraucher
vom gemeinsamen Laststrom ILast = 9 mA durchflossen, sodass am Vorwiderstand RV
ein Spannungsabfall von URV
= 0,9 V abfällt und an der roten LED
die Spannung ULED = U3V - URV = 3,17 V
- 0,9 V = 2,27 V.
Wenn
man nun erreichen will, dass die rote LED nicht mehr leuchtet, indem man
mit Strom den Strom ausschaltet, dann impliziert die wörtliche Bedeutung,
dass zum Ausschalten des Stromes A ein entsprechender Schalter
zum Einsatz kommt, der durch den Strom B eingeschaltet wird, damit der Strom
A nicht mehr fließt. Technisch
würde es sich beim Schalter in Wirklichkeit um ein Relais (bei Starkstrom um ein
Schütz)
handeln, dass durch einen Stromstoßschalter
eingeschaltet wird, um durch dessen Relaiskontakte den Strom A zu
unterbrechen. Bei dem Stromfluss durch das Relais bzw. durch die Relaisspule
würde es sich dann um den Strom B handeln, der den Strom A indirekt
unterbricht bzw. ausschaltet. Da
wir anstelle des mechanischen Schalters den „micro:bit“-Rechner verwenden,
kann es sich bei diesem, wenn überhaupt, nur um einen elektronischen Schalter
handeln. In diesem Zusammenhang stellt sich dann gleich die Frage, wie der elektronische
Schalter beschaffen sein muss und er schaltungstechnisch in die
Reihenschaltung eingebracht werden soll. Wenn man den „micro:bit“-Rechner als elektronischen
Schalter
verwendet, dann würde man z.B. mit diesem einen Strom einschalten, um einen
anderen Strom auszuschalten. Aber
der „micro:bit“-Rechner
ließe sich z.B. auch als elektronisch geregelte Spannungsquelle einsetzen.
Dann würde man aber nicht mehr mit einem Strom einen anderen Strom
ausschalten, sondern mit einer Spannung einen Strom ausschalten! Oder aber
vielleicht nicht direkt ausschalten, sondern eher verhindern, vermeiden! Die
reizvollere Variante ist nun, dass man mit einer Spannung einen Strom
ausschaltet, indem man diesen verhindert. Aber wie soll das funktionieren? Um
aber das Ganze besser zu verstehen, ist es didaktisch-methodisch sinnvoller,
sich zuerst mit den einfachen Dingen zu befassen als mit den schweren. 4.2.1 Strom mittels Überbrückungskabel umleiten
Die
sicherlich einfachste Methode, die rote LED auszuschalten, sodass diese nicht mehr
leuchtet, ist die, dass man den Strom, der normalerweise die rote LED
zum Leuchten bringt, einfach um diese herum leitet. Dazu muss man nur die beiden
Kontakte
der roten LED
mittels eines Kabels
überbrücken. Dabei kann man auch einen Schalter verwenden, so dass sich das einadrige Überbrückungskabel
einfach parallel zur roten LED schalten lässt. Wenn
man mit dem Überbrückungskabel
den Stromfluss um die rote LED herum leitet, dann entfällt
nicht nur der Stromfluss
durch die rote LED, sondern auch der Spannungsabfall an dieser, sodass
dann am Vorwiderstand
mit RV = 100 Ω
die volle Betriebsspannung mit URV = U3V
= 3,17
V anliegt. Demzufolge vergrößert sich dann auch die Stromstärke
durch den Vorwiderstand
RV
wie folgt: IRV = URV / RV = U3V
/ RV = 3,17 V / 100 Ω = 0,0317 A = 31,7 mA Wie
man hier im Überblick
zur Stromversorgung
des „micro:bit“-Rechner
nachlesen kann, liefert dieser bei Verwendung der Energieversorgung mittels
des „Micro USB
2.0“-Kabels einen maximalen Strom von bis zu 120 mA,
sodass also sichergestellt ist, dass wir den Rechner nicht überlasten. Dies
betrifft dann auch den Vorwiderstand RV selbst. Auch für
diesen müssen wir vorab die elektrische (Wärme-) Leistung wie folgt
berechnen: PRV = URV * IRV = U3V
/ IRV = 3,17 V * 31,7 mA = 100,489 mW ≈ 0,1 W Wenn
es sich bei dem Vorwiderstand um einen solchen mit 1/8 W
handelt, dann sind nach Adam Riese 1/8 W = 0,125 W also 25 % mehr als in diesem an
elektrischer Leistung umgesetzt wird! Demzufolge befinden wir uns auch hier
auf der sicheren Seite, sodass der Vorwiderstand keine roten Bäckchen
bekommt und auch nicht durchschmort. So,
jetzt können wir loslegen und das Programm
„Strom mit Strom ausschalten“
programmieren:
(Bild 40 – Strom mit
Strom ausschalten) Das
Programm lässt sich am besten verstehen, wenn man dieses zunächst anhand der
Bedienungsanleitung ausprobiert. Bedienungsanleitung
zum Programm
„microbit_teil_04_prog_24.hex“
mit dem Quelltext „microbit_teil_04_prog_24.py“
1. Starten und Ausführen des Programms Das in
den Arbeitsspeicher
des
„micro:bit“-Rechners geflashte Programm
startet sich nach wenigen Sekunden von allein und zeigt im Display
die programmierte Laufschrift „Start ...“ an. Dabei
verhält es sich, dass die rote LED, die mit dem Vorwiderstand RV
betrieben wird, leuchtet. 2. Taster A zum Ausschalten
der roten LED Wenn die
rote LED eingeschaltet ist und
leuchtet, dann lässt sie sich durch Drücken des Tasters A ausschalten. Dabei
erscheint die Laufschrift „Off …“, gefolgt vom Bild mit dem „Grumpy Cat“ ( L ).
Die rote LED glimmt ganz schwach als Zeichen dafür,
dass sie ausgeschaltet ist! 3. Taster B
zum Einschalten der roten LED Wenn
die rote LED ausgeschaltet ist und nur
noch ganz schwach glimmt, dann lässt sie sich durch Drücken des Tasters B
einschalten. Dabei erscheint die Laufschrift
„On …“, gefolgt vom Bild mit dem „Smiley Cat“ ( J ).
Die rote LED leuchtet hell als Zeichen dafür, dass
sie eingeschaltet ist! 4. Mit Tastenkombination Taster B&A das Programm beenden Beim Beenden
des Programms wird der „micro:bit“-Rechner wieder in den Ausgangszustand
versetzt, sodass sich die rote LED
wieder einschaltet und leuchtet. Da sich
die rote LED durch Drücken des Tasters B
einschalten lässt und das Leuchten der LED dem Ausgangszustand entspricht, muss man zum Beenden
des Programms zusätzlich zum Tasters B auch noch den Tasters A betätigen. Deshalb
die etwas ungewöhnliche Tastenkombination
B&A. Nachdem
Beenden
des Programms sind die beiden Taster A und B nicht mehr in Betrieb,
lässt sich die rote LED mit diesen nicht
mehr ein- oder ausschalten! 5. Mit dem „Reset“-Taster
alles wieder auf Anfang setzen Auf der Rückseite des „micro:bit“-Rechners befindet sich ein sogenannter „Reset“-Taster mit dem sich der Rechner neu starten lässt. Dabei wird
dann auch das zuvor in den Arbeitsspeicher
geflashte Programm wieder neu
gestartet! - Frage 5 Studieren
Sie das obenstehende Programm (siehe Bild 40) und probieren Sie es
mehrfach aus, indem Sie die Taster A und B drücken
und die rote
LED mehrfach ein- und ausschalten. Schauen Sie sich außerdem die Reihenschaltung
von roter LED
und Vorwiderstand
RV an (siehe Bild 36). Erklären
Sie, wie man mit dem Strom vom Port
„Pin P1“ des „mirco:bit“-Rechners die rote LED
(fast vollständig) ausschalten kann, sodass diese nur noch glimmt. Nach
welchem Prinzip funktioniert die Reihenschaltung, sodass man mit einem Strom
einen anderen Strom, nämlich den durch die rote LED,
ausschalten kann? Wenn
man die rote LED mit dem Taster A
ausschaltet, dann fällt einem sofort auf, dass die LED
wider Erwarten nicht ganz ausgeht, sondern immer noch etwas glimmt.
Weshalb ist das so? Versuchen Sie eine Antwort
zu geben, und begründen Sie diese! - Es
ist jetzt schon eine ganze Weile her. Ich denke so 20 bis 25 Jahre, da wurde
in einer Fernsehsendung gezeigt, wie eine junge Technikerin in Japan an einem
Hochspannungsmast
mit einer 380 kV Höchstpannungsleitung
einen meterlangen Glastellerisolator
aus grünlichen Glastellern während des laufenden Betriebs(!), also unter 380
kV Höchstspannung, wechselte. Möglich
wurde das Ganze, weil man die Technikerin in einem entsprechend isolierten
Transportkorb bereits auf der Erde auf eine elektrostatische
Spannung von exakt 380 kV aufgeladen hatte bevor der isolierte Transportkorb
vom Hubschrauber in die Höhe gehoben und zum defekten Isolator des
Hochspannungsmasten transportiert wurde. Dazu muss man wissen, dass es bei
einem Isolator,
wie ihn der isolierte Transportkorb aus Kunststoff darstellt, keine
freibewegliche Ladungsträger in Form von Elektronen wie im Kupferleiter
gibt, sodass sich keine Ladungen in Form eines elektrischen Stromes
transportieren lassen. Da
sich isolierte Körper je nach physikalischer Beschaffenheit entweder mit
positiven oder negativen elektrostatischen Ladungen (= elektrische Dipolladungen) aufladen
lassen, muss man vorab dafür sorgen, dass der isolierte Transportkorb mit der
richtig gepolten elektrostatischen Ladung aufgeladen wurde. Dies betrifft
dann aber nur das Auswechseln von Hochspannungsisolatoren einer
Gleichspannungsleitung! Bei einer 380 kV Höchstspannungsleitung mit
Wechselspannung oder Drehstrom würde das elektrostatische Aufladen des
isolierten Transportkorbs nichts bringen. Das
elektrostatische Aufladen des isolierten Transportkorbes bis auf eine
elektrostatische (Gleich-) Spannung von 380 kV musste natürlich behutsam
vorgenommen werden und dauerte dann auch bis zu einer halben Stunde. Dabei
hängt die Aufladezeit natürlich auch vom elektrostatischen Generator ab und
davon wie viel elektrostatische Ladungen dieser in besagter Zeitdauer
aufzubringen vermag. Dabei stellt sich dann die Frage, wie man die
elektrostatische Spannung von 380 kV quasi bis auf’s Komma genau messen will.
Insbesondere auch dann, wenn ein Teil der elektrostatischen Aufladung
permanent an die Umgebung als Funktion von Temperatur, Luftfeuchtigkeit und
Feinstaubpartikel abgegeben wird, also ständig nachgeladen werden muss. Aber
das wurde damals nicht im Film gezeigt oder erklärt. Als
sich dann aber der isolierte Transportkorb vom Hubschrauber aus dem
auszuwechselnden Isolator näherte, musste zuvor doch noch mit einer drei
Meter langen und nach außen isolierten Metallstange der verbleibende
Potentialunterschied von ein paar Tausend Volt zwischen der
Höchstspannungsleitung und dem isolierten und ebenfalls auf 380 kV
aufgeladenen Transportkorb ausgeglichen werden, was dann auch knapp eine
Minute dauerte. Wie
man heutzutage Höchstspannungsleitungen während des laufenden Betriebs vom
Hubschrauber aus wartet, kann man sich hier im Video „Half Million Volt Workers
Part 1“ bei YouTube anschauen. - So,
jetzt wissen Sie, dass man durch einen entsprechenden Potentialausgleich dafür sorgen
kann, dass es zwischen zwei elektrischen Kontakten keinen messbaren Potentialunterschied
mehr gibt, sodass die Spannungsdifferenz ∆U = 0 V beträgt. Und, wenn
es keinen Spannungsunterschied mehr gibt, kann auch kein Strom
mehr fließen. Oder umgangssprachlich ausgedrückt: Wo keine Spannung
ist, ist bzw. fließt auch kein Strom. Wenn
wir also erreichen wollen, dass die rote LED nicht mehr leuchtet, dann muss
man nur dafür sorgen, dass es zwischen den beiden Anschlussdrähten der LED keinen
Potentialunterschied
mehr in Form eines Spannungsabfalls gibt. Demzufolge muss dann die Spannung
am Pluspol
der LED
genau so groß sein wie am Minuspol, sodass folgt: ∆ULED = 0 V mit ILED = 0 mA. Wenn
also unsere rote
LED trotz der Stromversorgung mittels der programmierbaren Spannungsquelle
vom Port „Pin
P0“ immer noch etwas vor sich hin glimmt, dann liegt es daran,
dass es parallel zur LED immer noch einen kleinen Potentialunterschied
in Form eines kleinen Spannungsabfalls gibt, der die LED
noch ganz schwach leuchten lässt. Der
Grund dafür könnte dann der sein, dass die programmierbare Spannungsquelle
vom Port „Pin
P0“ nicht über genügend elektrische Leistung verfügt, um den Mittelanschluss
des Spannungsteilers
auf das gleiche Spannungspotential zu heben wie am dies am
Anschluss der Versorgungsspanung
U3V der Fall ist. - Mit
der nachfolgenden, um eine programmierbare Spannungsquelle vom Port „Pin P1“
erweiterte Schaltung lässt sich das Problem lösen (siehe
auch in der ausführlichen Antwort auf die Frage 6):
(Bild 41
–Stromverdoppelung durch Parallelschalten der Ports) Diesbezüglich
stellt sich dann die Frage, wie klein der Spannungsabfall ∆ULED
mindestens sein muss, damit die rote LED nicht mehr leuchtet und auch
nicht mehr vor sich hin glimmt! Wenn
Sie aufgepasst haben, dann müssten Sie jetzt wissen, dass eine rote LED
erst ab einer Flussspannung
von UF > 1,6 V zu leuchten anfängt! Wenn
also unsere rote
LED nicht mehr leuchten soll, dann muss der Spannungsabfall
an dieser deutlich kleiner sein als die Flussspannung: ∆ULED < UF
< 1,6 V Für
den Spannungsumlauf
folgt dann: ULED
+ URV - U3V = 0 Dabei
besagt der sogenannten Maschen-/Spannungsumlauf, dass die Summe aller
in der Masche
vorhandenen Spannungen
gleich null ist! Für
den Spannungsabfall
an der roten
LED gilt demzufolge: ULED = U3V
- URV = 3,15 V – 2,15 V = 1 V (… gemessen: 0,996 V) Somit ist der Spannungsabfall mit ULED = 1 V parallel zur roten LED tatsächlich kleiner als die Flussspannung UF:
ULED < UF
< 1,6 V
Mit
dem Programm „microbit_teil_04_prog_25.hex“
und dem Quelltext „microbit_teil_04_prog_25.py“
lässt sich das Ganze selbst ausprobieren:
(Bild 42 –
Spannungsverdoppelung am Vorwiderstand) Wenn also eine Spannungsquelle am Port „Pin P1“, wie im Bild 40 zu sehen, mit einer Spannung von UPin P1 = 1,4 V nicht ausreicht, um einen Potentialausgleich zwischen der Versorgungsspannung U3V = 3,16 V und der Spannung am Mittelpunkt des Spannungsteilers URV = 1,42 V wegen des noch immer zu großen Spannungsabfalls an der roten LED mit ULED = U3V - URV = 3,16 V - 1,42 V = 2,74 V
> UF = 1,6 V herbeizuführen, sodass
die LED
erlischt, dann muss man
einfach noch eine weitere Spannungsquelle
am Port „Pin
P0“ (siehe Bild 41 und 42) hinzufügen, ULED = U3V - URV
= 3,15 V - 2,15 V = 1,0 V <
UF = 1,6 V damit die rote LED nicht mehr
leuchten kann, weil es ihr an der entsprechenden Spannung fehlt!
- Wie
man im Programm „microbit_teil_04_prog_25.hex“
und dem Quelltext „microbit_teil_04_prog_25.py“
und oben im Bild 42 sieht, wurden zwei
Spannungsquellen
an den Ports „Pin
P0“ und „Pin P1“ so programmiert, dass sich diese
mittels der Taster
A und B digital ein- und ausschalten lassen. Um
zu erreichen, dass die rote LED nicht mehr leuchtet, nicht
mehr leuchten kann, muss
man ihr nur „den
Saft wegnehmen“, indem man die beiden digital schaltbaren Spannungsquellen
mit dem Taster
A einschaltet. Wie
aber inzwischen bekannt sein dürfte, lassen sich die beiden Spannungsquellen
an den Ports „Pin
P0“ und „Pin P1“ aber auch analog steuern und
regeln! „Steuern“
bedeutet in diesem Fall, dass man die Spannungsquelle jederzeit programmiert ein-
oder ausschalten kann. Und „regeln“ bedeutet, dass sich die Ausgangsspanung
z.B. in Abhängigkeit von Signalpegeln einstellen lässt:
(Bild 43 – Spannung am
Vorwiderstand analog einstellen) Wenn
man die obenstehende Schaltung ausprobiert und nach dem Programmstart den Taster B
betätigt, dann erscheint zunächst die Laufschrift
„On …“, um zu signalisieren, dass die rote LED
eingeschaltet wurde. Allerdings nur mit „halber Kraft“, da die Spannungsquelle
am Port „Pin
P1“ mit dem Binärwert = 0 nicht zum Leuchten der LED
beiträgt (siehe roter Kasten oben im Bild 43). Anschließend ist
die „Grumpy
Cat“ ( L )
im „5 x 5
LED-Matrix“-Display zu sehen. Nach
einer Pause
von 10.000 ms = 10 s (zur Erinnerung: 1 s = 1000 ms → 10
000 ms = 10 s) wird dann voll aufgedreht, indem die beiden analogen Spannungsquellen
an den Ports „Pin
P0“ und „Pin P1“ auf ihre binären Maximalwerte
von 10232
aufgeregelt werden, sodass die rote LED nicht mehr leuchtet, sondern nur
noch ganz leicht vor sich hin glimmt. Abschließend erscheint dann die „Smiley Cat“ ( J )
im „5 x 5
LED-Matrix“-Display. Starte
das Programm „microbit_teil_04_prog_26.hex“
mit dem Quelltext „microbit_teil_04_prog_26.py“
und betätige zuerst den Taster A, sodass die rote LED nicht mehr
leuchtet und total dunkel wird. Betätige
als Nächstes den Taster B, sodass die rote LED nach 10 s ausgeschaltet wird,
aber trotzdem noch still und leise vor sich hin glimmt! Erkläre,
weshalb sich die rote LED wider Erwarten nicht komplett
ausschalten lässt, obwohl ja die beiden analogen Spannungsquellen an den Ports „Pin P0“
und „Pin P1“
auf ihre binären Maximalwerte von 10232 aufgeregelt
wurden! 4.2.2 Eine analoge Spannungsquelle, die keine ist
Bei
der Frage 7 wurde zwischen analoger
und digitaler Spannungsquelle
unterschieden. Und zwar softwaremäßig
wegen der Programmierung und hardwaremäßig,
um zum Ausdruck zu bringen, dass sich die Klemmenspannung einer digitalen
Spannungsquelle nicht regeln, sondern nur ein- oder
ausschalten lässt. Und das noch dazu mit fest definierten Logikpegeln
für „on“ (= „1“) und „off“ (= „0“). Im
Gegensatz zur digitalen Spannungsquelle ist die Klemmenspannung der analogen Spannungsquelle
durch entsprechende Programmierung regel- und steuerbar. Steuerbar deswegen,
weil sie sich nicht nur regeln sowie ein- und ausschalten lässt, sondern auch
programmierbar ist. So lässt sich z.B. die Klemmenspannung als Funktion eines
bestimmten Signalpegels
einstellen oder regeln. Wenn
man sich den „micro:bit“-Rechner
anschaut, dann wird man vergeblich nach der analogen
oder digitalen Spannungsquelle im Sinne einer
kleinen Hardware
suchen, weil es sich bei diesen um elektronische Spannungsquellen handelt, die
jeweils Bestandteil einer engl. „Analog I/O“- oder „Digital I/O“-Einheit
sind. Dabei steht die Abkürzung „I/O“ für engl. „Input/Output“, d.h. für
„Ein-/Ausgabe“. Bei
der analogen Spannungsquelle handelt es sich
also um einen analogen Ein- und Ausgang,
der je nach Verwendung entsprechend programmiert werden muss. Dabei verbirgt
sich hinter dem „Analog I/O“ ein sogenannter „PWM“, d.h.
eine „Puls-Weiten-Modulation“.
>> Eine Steuerung über PWM kommt zum Zweck einer Drehzahländerung von neueren Gehäuse- und CPU-Lüftern zum Einsatz. Ein
weiteres Anwendungsbeispiel ist das Dimmen durch PWM-Steuerung. Diese Technik wird
insbesondere bei
Leuchtdioden (LEDs),
wie sie auch oft als Hintergrundbeleuchtung bei Mobiltelefonen oder
auch bei Cockpit-Anzeigen oder Bremsleuchten in
neueren Kraftfahrzeugen eingesetzt werden, verwendet. Bei ausreichend kurzer Ein- und Ausschaltdauer nimmt das
menschliche Auge nur die durchschnittliche Leuchtstärke wahr, sodass diese
mit dem Tastgrad linear gesteuert werden kann. Hierbei ist darauf zu achten,
dass die Taktfrequenz ausreichend hoch angesetzt ist (beispielsweise 10 kHz),
sodass das Auge, auch bei schneller Bewegung, keine Helligkeitsschwankungen
(Flimmern) wahrnehmen kann. Bei hohen Schaltfrequenzen bleibt auch die Energie eines
Einzelimpulses klein im Bezug auf die Wärmekapazität des
emittierenden Chips. Die kurzzeitige Spitzentemperatur des Bauteils während
des Pulses verbleibt daher bei hohen Schaltfrequenzen nahe der Temperatur,
welche der mittleren Leistung des PWM-Signals entspricht. Dies ist besonders
für temperaturempfindliche Verbraucher wie Hochleistungsleuchtdioden von
großem Vorteil. Eine Tiefpassfilterung ist bei Ansteuerung von LEDs nicht
gewünscht, da Farbe und Wirkungsgrad stromabhängig sind und die Leuchtstärke
stark nichtlinear von dem Betriebsstrom abhängt. Leistungselektronik Der Mittelwert einer Spannung kann mittels PWM stufenlos
proportional zum Tastgrad vermindert werden. Die Einstellung der verminderten
Spannung ist bei relativ geringer Verlustleistung möglich, da die
Leistungsschalter (außer in den Umschaltmomenten) nur in zwei Zuständen
betrieben werden: Voll sperrend (nur Leckstrom bei voller Spannung) oder voll
durchgeschaltet (nur Durchlassspannung bei voller Stromstärke). Damit hat die
PWM auch in der Leistungselektronik Bedeutung. Einsatzbereiche sind Gleichstromsteller, Frequenzumrichter bzw. Elektromotoren, Inverter
für das Widerstandspunktschweißen, Heizelemente, Dimmer, Schaltnetzteile, Klasse-D-Verstärker und elektronisch kommutierte Ventilatoren. <<
(Quelle: Wikipedia) So,
nun haben wir es schwarz auf weiß, weshalb die rechte rote LED
beim Programm „microbit_teil_04_prog_27.hex“
mit dem Quelltext „microbit_teil_04_prog_27.py“
flimmert und glimmt. Optisch, d.h. von der Wahrnehmung her, glimmt die
LED,
elektrisch aber flimmert sie. Und zwar immer dann, wenn das Puls-Pausenverhältnis
der Puls-Weiten-Modulation
(PWM) sehr niedrig ist, die Einschaltzeit der rechten roten LED
sehr kurz und die Ausschaltzeit (= Pause) sehr lang sind.
Der physische Grund dafür, dass man
ein Glimmen
sieht, ist der, dass das Auge wegen seiner Trägheit einen Mittelwert
des flackernden
Lichts bildet, sodass die LED zwar elektrisch flackert, das aber im
Falle einer schnellen Wechsel-/Taktfrequenz als schwaches Glimmen
wahrgenommen wird. Dabei gilt es zu beachten, dass eine LED ab einer Flussspannung UF > 1,6 V stets hell leuchtet und beim Unterschreiten von UF < 1,6 V den Stromfluss sperrt und nicht leuchtet!
Demzufolge
kann eine LED
subjektiv zwar still und leise vor sich hin glimmen, das aber
elektrisch nur im Falle eines kleinen Puls-Pausen-Verhältnisses, d.h.
bei einer sehr kurzen Einschaltzeit und einer sehr langen Ausschaltzeit
( = Pause), was dann bei der LED einem elektrischen Flackern
(= ein/aus) entspricht. - Wenn
man also das elektrische Flackern und optische Glimmen
der LED
wegbekommen will, dann muss man vermeiden, dass sich durch das Auge bzw.
Gehirn ein Mittelwert
des einfallenden Lichts bildet, der als Glimmen wahrgenommen wird. Elektrisch
lassen sich Mittelwerte
bei einer Rechteckschwingung
immer leicht bilden, indem man einen Elektrolytkondensator
(= Elko) parallel zur anliegenden Rechteckspannung anschließt. Im vorliegenden
Fall also parallel zum rechten Vorwiderstand RV des Spannungsteilers:
(Bild 47 – Glätten der
externen Rechteckspannung) Die
Größe des Kondensators
C beläuft sich dabei auf C
= 1 µF bis 10 µF. Da es sich um einen Elektrolytkondensator
(= Elko) handelt, muss dieser polungsrichtig, d.h. mit dem Minuspol
nach Masse
(= Pin „GND“) in die Schaltung eingesetzt
werden! Beim
Glätten
der Rechteckspannung
(blau)
wirkt der Elko
als Energiespeicher,
der sich beim Einschalten
gemäß einer e-Funktion
mit u(t) = U * ( 1 - e-t/Ƭ ) und der Zeitkonstanten Ƭ =
R * C auflädt und beim Ausschalten mit u(t) = U * e-t/Ƭ
entlädt, sodass sich die Impulsflanken der Rechteckspannung (rot)
entsprechend abflachen:
(Bild 48 – Glätten der
externen Rechteckspannung) Beim
Aufladen
eines Elkos
an einer herkömmlichen Gleichspannung
ist dieser nach der Zeitspanne 5 Ƭ = 5* R
* C nahezu vollständig aufgeladen (= 99,3 %). Damit
die Lade- und
Entladeströme besonders großer Elkos ( > 10.000 µF) die Leistungselektronik
nicht zerstören, müssen diese durch einen Widerstand oder eine spezielle Elektronik
in ihrer Stromstärke
begrenzt werden! Nachdem
wir nun der rechten roten LED in der Schaltung das schwache und
irritierende Glimmen
abgewöhnt haben (siehe oben im Bild 47), müssen wir im dazugehörigen Programm „microbit_teil_04_prog_28.hex“
mit dem Quelltext „microbit_teil_04_prog_28.py“
noch dafür sorgen, dass
dieses beim analogen Ausschalten
der rechten roten LED mit dem Taster B auch noch den richtigen
Bitwert
zum Umrechnen
in den dazugehörigen Spannungsabfall am rechten Vorwiderstand RV
in der Laufschrift
anzeigt: URV
analog
= 7022 Bit
* 3,14 V / 1024 Bit = 2,1526172 V
= 2,15 V (… gemessen: 2,14 V) URV analog
= U3V - ULED R
= 3,14 V - 0,99 V = 2,15 V (… gemessen: 0,99 V an der LED) Dass
der „micro:bit“-Rechner
vom Typ „nRF51822“
mit seinem ARM® Cortex™-M0 32 Bit
Prozessor und seiner Taktfrequenz von 16 MHz(!) nicht besonders
schnell rechnet, dafür aber im Gegenzug auch nur wenig Strom
braucht, ist uns schon klar. Dass er beim Umschalten vom digitalen Schreiben des Binärwertes 12 (= grüner Kasten) auf das analoge Einlesen eines Bitwertes
(= roter
Kasten) zwingend eine kleine Pause von z.B. 100 ms
benötig, um im Anschluss daran richtig rechnen zu können, dürfte kaum
jemanden bekannt sein:
(Bild 49 – Richtig
rechnen nur nach der Pause!) In
der Messtechnik,
beim Umgang mit dem Multimeter
und beim Messen
diverser elektrischen Größen gibt es eine Regel, einen Erfahrungsgrundsatz
sozusagen: „Wer viel misst, misst Mist!“. Demzufolge werden mehrfache Messungen
an ein und derselben Schaltung, Spannung oder Widerstand nicht
durch x-faches Wiederholen automatisch richtig. Insbesondere
deshalb nicht, weil man sich dabei gedanklich im Kreis dreht, weil man
stets die gleiche Messmethode, das gleiche Messverfahren oder dieselbe Logik
anwendet. Man
muss eben die Dinge von Zeit zu Zeit immer wieder mal kritisch hinterfragen:
Warum ist das so? Muss das so sein? Kann man das nicht auch anders machen?
Dabei kommt es auch darauf an, dass man sich mal zwischen drin auch eine Pause
gönnt, etwas ganz anderes macht und sich später wieder der ursprünglichen
Aufgabe
zuwendet. Ähnlich
verhält es sich mit dem „micro:bit“-Rechner, der bei stimmten Anlässen
auch eine Pause
braucht. So benötigt der
Rechner beim direkten und sofortigen Umschalten von „Schreiben, d.h. Ausgeben
eines digitalen Wertes“
auf „Lesen, d.h. Einlesen eines analogen Wertes“, stets eine kleine Pause von ca. 100 ms,
damit es zu keinen falsch eingelesenen Messwerten kommt! Diesbezüglich
stellt sich dann auch die Frage, ob man tatsächlich nur einem einzigen
ermittelten Messwert
vertrauen soll, oder ob es nicht besser wäre, ein Dutzend Messwerte
aufzunehmen, daraus den Mittelwert zu berechnen und mit diesem weiter zu
rechnen:
(Bild 50 – Genauer
rechnen mit Mittelwert) Wie
man im obenstehenden Bild beim Sourcecode in den beiden roten Kästen sieht, werden mittels
des Statements ·
show_analogval
= pin2.read_analog() insgesamt
15 Messwerte
eingelesen. Und zwar wird der erste Messwert außerhalb der „for“-Schleife
eingelesen. Und zwar deswegen, um die Variable
„show_analogval“ vorab zu
deklarieren und initialisieren. In der „for“-Schleife selbst werden dann nur noch Schleifendurchläufe
von [ 0 … 13 ]
durchlaufen, also insgesamt 14 an der Zahl. Nach der „for“-Schleife wird dann der Mittelwert
von n_max + 1
= 15 gebildet, der wiederum wegen der Division durch 15 aus einer Dezimalzahl
besteht! Da
es sich bei den eingelesenen analogen Messwerten um ganzzahlige Werte
im Bereich [ 0
… 2013 ], d.h. mit bis zu 2014 Werten insgesamt, handelt werden bei der Mittelwertbildung
die restlichen Nachkommastellen mit dem „int“-Befehl einfach abgeschnitten, sodass man
später mit dem ganzzahligen Wert weiter rechnen kann. Wegen
der fehlenden Rundung kann deshalb beim Abschneiden der
restlichen Nachkommastellen
bei der Mittelwertbildung
des eingelesenen Bitwertes eine Ungenauigkeit von 1 Bit
entstehen. Digitaler Betrieb beim
Betätigen des Tasters A Beim
Betätigen des Tasters
A werden die beiden parallel geschalteten, digitalen
Spannungsquellen
der Ports „Pin
P0“ und „Pin P1“ zugeschaltet, sodass die rechte
rote LED
erlischt (siehe Schaltung in Bild
47). Dabei lässt sich in der
Laufschrift ein Bitwert von 7052 in der Laufschrift ablesen: URV
digital = 7052
Bit * 3,14 V / 1024 Bit = 2,16181640625 V = 2,162 (… gemessen: 2,14 V) ULED R = U3V – URV digital = 3,14 V - 2,162 V = 0,978
V < UF <
1,6 V (…
gemessen: 0,99 V) Analoger Betrieb beim
Betätigen des Tasters B Beim
Betätigen des Tasters
B werden die beiden parallel geschalteten, analogen Spannungsquellen
der Ports „Pin
P0“ und „Pin P1“ zugeschaltet, sodass die rechte
rote LED
erlischt, aber wegen des zum Vorwiderstand RV parallel
geschalteten Elkos
jetzt nicht mehr schwach glimmt! Dabei lässt sich in der
Laufschrift ein Bitwert von 7042 in der Laufschrift ablesen: URV
analog = 7042 Bit * 3,14 V / 1024 Bit =
2,15875 V = 2,159 V (… gemessen: 2,14 V) ULED R = U3V – URV analog = 3,14 V - 2,159 V =
0,981 V (… gemessen: 0,99 V) = 0,981 V < UF < 1,6 V → (… rechte rote LED ist dunkel, d.h.
ausgeschaltet!) Wie
immer lässt sich das Ganze auch mit dem Programm
„microbit_teil_04_prog_29.hex“
mit dem Quelltext „microbit_teil_04_prog_29.py“
ausprobieren! Wenn
man sich den Quelltext
des Programms
anschaut, dann fühlt man sich förmlich aufgefordert, diesen zu vereinfachen,
da ja die Routine zur Mittelwertbildung doppelt vor kommt. Und
zwar jeweils für den Taster A und B (siehe die beiden roten Kästen
im Bild 50). Da liegt es
also auf der Hand, dass man diese zu einer Funktion namens „mittelwert_abrunden()“
wie folgt zusammen fasst:
(Bild 51 – Programm mittels
Funktion vereinfachen) Wie
man oben im Programm „microbit_teil_04_prog_30.hex“
mit dem Quelltext „microbit_teil_04_prog_30.py“
sieht, handelt es sich um die einfachste Form einer Funktion, da dieser weder der Wert
einer Variablen
beim Aufruf
derselben übergeben, noch ein Wert nach dem Funktionsaufruf zurückgegeben
wird! Interessanter
und reizvoller ist es natürlich, wenn man weiß, wie man eine Funktion
programmieren muss, damit diese z.B. auch einen Ergebniswert zurückliefert:
(Bild 52 –Funktion mit
Rückgabewert) Auch
das oben im Bild gezeigte Programm „microbit_teil_04_prog_31.hex“
mit dem Quelltext „microbit_teil_04_prog_31.py“
lässt sich natürlich selbst ausprobieren. Wenn
der Rückgabewert,
d.h. der Wert
der Variablen „show_analogval“
zwecks Weiterverarbeitung
im Hauptprogramm
nicht benötigt wird, dann lässt sich Funktion „mittelwert_abrunden()“
auch direkt aufrufen. Und zwar direkt im Statement ·
display.scroll("Bitwert = " + str(mittelwert_abrunden())) Das
Interessante bei diesem Statement ist, dass einerseits die Funktion „mittelwert_abrunden()“
im „display.scroll(…)“-Statement aufgerufen, ausgeführt und
anschließend der Rückgabewert der Variablen „show_analogval“ direkt
in der Laufschrift
angezeigt wird:
(Bild 53
–Funktionsaufruf mit doppeltem Nutzen) „Zwei
Fliegen auf einen Streich“, das gibt’s nur hier mit dem Programm „microbit_teil_04_prog_32.hex“
und dem Quelltext „microbit_teil_04_prog_32.py“.
4.2.3 Pseudo-Dimmen mit „Up and down“-Funktion
Leuchtdioden (LEDs) sind
Halbleiter, d.h. nichtlineare
Bauelemente,
deren Kennlinie nicht
wie bei einem Ohmschen
Widerstand gemäß Geradengleichung
mit konstanter Steigung verläuft, sondern mit einer sich
fortwährend ändernden Steigung,
sodass diese in jedem Punkt des Graphen der Funktion einen anderen Wert
hat. Demzufolge lässt sich das Ohmsche Gesetz nicht
als Ganzes durchgängig anwenden, sondern immer nur abschnittsweise,
wenn die Kennlinie
ein Stück weit geradlinig, d.h. ohne Krümmung verläuft! Wichtiges Know-how, um
eine LED zum Leuchten zu bringen ·
Eine (Halbleiter-) Diode oder auch eine Leuchtdiode
(LED) zeichnet sich dadurch aus, dass sie den elektrischen Strom nur in eine Richtung durchlässt und das auch
nur, wenn sie elektrisch leitend ist, d.h. ab einer Flussspanung UF > 1,6 V (… gilt nur für eine rote LED). ·
Wenn also eine LED in
einem Stromkreis,
einer Schaltung
leuchten soll, dann
muss man zunächst dafür sorgen, dass sie richtig herum gepolt ist, sodass der Strom
von der Anode (= Pluspol)
zur Kathode (= Minuspol)
hin fließen kann (= technische Stromrichtung). ·
Als Nächstes muss man
dafür sorgen, dass die Spannung,
der Spannungsabfall
an der LED
groß genug ist, um diese elektrisch leitend zu machen und leuchten
zu lassen (siehe Flussspannung UF > 1,6 V einer rote LED).
Wenn
ein Halbleiter wie
z.B. Dioden, Zenerdioden LEDs, Transistoren, Feldeffekttransistoren,
MOS-FETs, Thyristoren, Triacs usw. elektrisch leitend ist, also in Durchlassrichtung
betrieben wird und sich
im Durchlassbetrieb
befindet, dann ist er teils extrem niederohmig, sodass der Durchgangswiderstand
von Plus nach Minus bei einem kleinen Transistor im Sättigungsbereich
mit UCE sat = 0,4 V, IC max = 0,3 A → RCE
= ∆UCE sat / ∆ICE = 0,4 V / 0,3 A nur 1,33 Ω groß ist! Zum Vergleich: eine 6 Volt Glühlampe
beim Vorderrad eines Fahrrades hat eine Leistung von P = 1 W, sodass ein Strom
von I = P / U = 1 W / 6 V = 0,167 A fließt. Gemäß dem Ohmschen Gesetz
berechnet sich dann der Ohmsche Widerstand R der Glühwendel wie folgt: R = U
/ I = 6 V / 0,167 A = 35,93 Ω. Obwohl die Stromstärke der Glühlampe
nur halb so groß ist wie beim Transistor im Sättigungsbereich, ist ihr Widerstand
fast 30x
so groß! ·
Damit der Transistor
(oder eine LED)
im Durchlass-
oder Sättigungsbereich
dann nicht durchbrennt, muss dieser durch Vorschalten eines Vorwiderstandes RV
in Reihenschaltung
geschützt werden. Dabei wird der Stromfluss, die Stromstärke durch den Spannungsteiler
(= Vorwiderstandes
RV plus Halbleiter in Reihe) entsprechend begrenzt.
Für
gängige Leuchtdioden
(LEDs) gibt es hier
einen LED-Vorwiderstandsrechner
mit dem sich die eigene Berechnung des Vorwiderstandes
überprüfen lässt. ·
Elektrische Verbraucher
wie z.B. das Radio, der Fernseher, der Computer, eine Glühlampe oder
Leuchtdiode (LED) werden normalerweise mit einem entsprechenden Ein-/Ausschalter,
engl. „Power“ mit der Beschriftung „I/O“ oder „On/Off“, ein- oder
ausgeschaltet. Das gilt auch für einen herkömmlichen Licht-/Schnurschalter mit dem sich
eine Schreibtisch- oder Leselampe ein- oder ausschalten lässt. Wenn man die Schreibtisch- oder Leselampe auch
als Hintergrundbeleuchtung
beim Fernsehen
verwenden will, dann muss man diese entsprechend abdunkeln! Aber bitte nicht
mit einem leicht brennbaren Dekorationstuch aus dem Wohnzimmer, das als Folge
des Hitzestaus
innerhalb kurzer Zeit zu einem Zimmerbrand führen kann! Heutzutage
geht ja fast alles elektronisch, analog oder digital, regeln wir die Helligkeit
der Leselampe
mit einem sogenannten Dimmer.
Dabei muss unbedingt zwischen dem Regeln einer Ohmschen Last (= Glühlampe)
oder einer induktiven Last (= Bohrmaschine) unterschieden werden! Demzufolge
eignet sich ein Dimmer für Ohmsche Last nicht für die Drehzahlregelung
einer Bohrmaschine!
·
Auch wir dimmen
die Helligkeit
unserer roten
LED elektronisch. Obwohl sich eine LED normalerweise nicht dimmen
lässt. Der Grund dafür ist der, dass die LED entweder den elektrischen Strom leitet
oder sperrt. Etwas Kompromissvolles, ein halbherziges
Ich-weiss-nicht-so-recht gibt es bei der LED nicht, nur schwarz oder weiß, hell
oder dunkel! Auch
wenn sich eine LED wegen der steilen Kennlinie und des
spitzen Steigungsdreiecks
im Durchlassbereich
nicht auf herkömmliche Weise in der Helligkeit regeln lässt,
verhielt es sich beim Betrieb der roten LED an einer programmierbaren digitalen und analogen Spannungsquelle an den Ports „Pin P0“ und „Pin P1“
des „micro:bit“-Rechners
dennoch so, dass diese beim Betrieb an der analogen Spannungsquelle am Port „Pin P1“ im ausgeschalteten
Zustand
ganz leicht vor sich hin glimmte! Dabei
stellte es sich dann im weiteren Verlauf heraus, dass es sich bei der programmierbaren analogen Spannungsquelle am Port „Pin P1“
in Wirklichkeit um einen sogenannten „Plus-Weiten-Modulator
(PWM)“ handelte, der die rote LED fortwährend mit kurzen Impulsen
ein- und ausschaltete! Durch die elektrische
und optische Mittelwertbildung
entstand dabei der subjektive Eindruck, als würde die LED gedimmt, würde diese in
der Helligkeit
geregelt. Was aber nicht stimmt! Die LED wurde eben nicht in der
Helligkeit,
nicht in der Größe der anliegenden Spannung bzw. des Spannungsabfalls
geregelt, sondern
durch schnelles Ein- und Ausschalten gesteuert! ·
Da wir bisher noch nicht
konkret mit der „PWM“ gearbeitet und diese programmiert haben,
dabei aber trotzdem die arithmetische Helligkeit der roten LED
durch gezielte Mittelwertbildung verändern wollen, müssen wir uns
etwas Besonderes
einfallen lassen, was in den meisten Lehrbüchern, wenn überhaupt, nur am Rande mit
ein paar Sätzen erwähnt wird: nämlich die Helligkeitsregelung der roten LED durch Auf- und Abregeln
der Versorgungsspannung
an der LED!
Dabei geht es konkret darum, dass wir das elektrische
Potential,
d.h. den Potentialunterschied
zwischen Anode
(= Pluspol) und Kathode (= Minuspol) der roten LED schrittweise verringern! Und zwar so lange, bis es zwischen
den Anschlüssen
der roten LED
keinen Potentialunterschied
in Form einer Spannungsdifferenz
mehr gibt: ∆ULED
= 0 V. Praktisch
haben wir das umgesetzt, indem wir die zwei Spannungsausgänge der Ports „Pin P0“
und „Pin P1“
am Mittelpunkt „b“ des rechten Spannungsteilers zusammen geschaltet (siehe Bild 47) und für den Tastendruck
mit den Tastern
A und B programmiert haben. Als
Nächstes geht es darum, dass wir das Programm
„microbit_teil_04_prog_28.hex“
und dem Quelltext „microbit_teil_04_prog_28.py“
aufgreifen und dahingehend abändern und erweitern, sodass sich mit den Tastern A und
B die rechte rote LED hell und dunkel regeln lässt. Diesbezüglich
starten wir mit der Programmierung des „analogen“ Tastern B,
sodass dieser beim längeren Gedrückthalten die rechte rote LED
aufsteuert und diese hell leuchtet. Da wir die Helligkeit der LED in
der Weise steuern, indem wir den Spannungsabfall parallel zur LED verringern
(= LED geht aus) oder möglichst bis auf das Niveau der Spannungsversorgung am großen Rundanschluss „Pin
3V“ vergrößern (= LED geht an, leuchtet), haben wir es
quasi mit der negativen Logik der Spannungsregelung an der LED zu tun. Demzufolge
stellt sich also als Erstes die Frage, wie groß der Spannungabfall URV am rechten
Vorwiderstand RV = 100 Ω sein muss, damit die rechte rote LED
nicht mehr leuchtet, nicht mehr leuchten kann, weil das Spannungspotential
am Mittelpunkt „b“ nahezu dem der Versorgungsspannung U3V entspricht
(siehe Bild 47): ULED R = U3V – URV = U3V
– I * RV =
3,14 V – 10 mA * 100 Ω = 3,14 V – 1000 mV = 3,14 V – 1 V = 2,14 V
Bitwert = 1024
Bit / 2,14 V = 478,5046728971963 Bit / V = 478 Bit / V Wenn
man den berechneten Bitwert = 478 Bit / V ins Programm „microbit_teil_04_prog_33.hex“
und dem Quelltext „microbit_teil_04_prog_33.py“
einsetzt und dieses ausführt, dann leuchtet die rechte rote LED,
obwohl sie das nicht soll:
(Bild 54 –Berechnen
heißt nicht richtig anwenden) Dass
wir etwas falsch gemacht haben, zeigt sich auch daran, dass in der Laufschrift
der Bitwert 326
Bits / V angezeigt wird, obwohl es doch 478 Bit / V sein sollten! Eine
Spannung,
einen Spannungsabfall
oder einen Bitwert
berechnen ist eben das eine und richtig anwenden das andere! Was
wurde also falsch gemacht? Machen Sie sich Gedanken, und finden Sie heraus,
worin der Fehler besteht! – Zweiter
Anlauf zur Klärung der Frage, wie groß der Spannungabfall URV am rechten
Vorwiderstand RV = 100 Ω sein muss, damit die rechte rote LED
nicht mehr leuchtet, nicht mehr leuchten kann, weil das Spannungspotential
am Mittelpunkt „b“ nahezu dem der Versorgungsspannung U3V entspricht
(siehe Bild 47). Wie wir inzwischen wissen, wird eine Siliziumdiode (und dazu zählen auch LEDs) ab einer Durchbruchspannung von UDurch > 0,7 V elektrisch leitend, d.h. stromdurchlässig. Demzufolge müsste sie bei einer Spannung von ULED R = 0,4 V sicher sperren! Für den Spannungsabfall
am rechten Vorwiderstand RV folgt dann: URV analog = U3V – ULED R = 3,14 V – 0,4 V = 3,1 V Bitwert = 1024
Bit / 3,14 V * 3,1 V = 1010,955414012739 Bit / V ≈ 1011 Bit / V Für
den Spannungsabfall
an der rechten rote LED folgt abschließend: ULED R = U3V – URV analog = 3,14 V – 3,1 V =
0,04 V < UF < 1,6 V (… LED
ist stockdunkel!) So,
nun können wir uns daran machen und ein Programm programmieren mit sich die rechte
rote LED
des rechten Spannungsteilers (siehe Bild 47) schrittweise
von stockdunkel
auf hell
leuchtend per Tastendruck auf den linken Taster A
des „micro:bit“-Rechners
aufregeln lässt. Wenn
man aber das mit dem „schrittweise“ wörtlich nimmt, dann müsste man
tatsächlich von [ 1011 … 0 ] Bit insgesamt 1011+1 = 1012 Bitwerte bis 0 rückwärts
durchlaufen, was dann mit der Laufschriftanzeige etliche Minuten(!) dauern würde. Aber
es geht natürlich auch schneller, indem man in einer größere Schrittlänge
rückwärts zählt! Wenn man z.B. die Helligkeit der LED in
nur 10
Schritten aufregeln möchte, dann müsste man nach Adam Riese
eine Schrittlänge
von 1012 / 10 = 101 wählen. Damit
wir dann aber beim Herunterzählen stets ganzzahlige Werte
erhalten, muss man den Startwert auf 1010 setzen: Schleifendurchläufe = 1010 Startwert / 101
Schrittlänge = 10 Schleifen
Da
sich der Anwender
nicht für das Herunterzählen von Bitwerten interessiert und damit
auch nichts anfangen könnte, programmieren wir einen Anwender freundlichen
Zähler, der beim Aufsteuern der Helligkeit von 1 bis 10
hoch zählt und diesen darüber in der Laufschrift informiert:
(Bild 55 – „Pull
Up“-Helligkeitsregler für die rote LED) Wie
man selbst überzeugen kann, funktioniert das obenstehende Programm „microbit_teil_04_prog_35.hex“
mit dem Quelltext „microbit_teil_04_prog_35.py“
einwandfrei, sodass sich dieser kopieren und für den Taster B zum Heraufzählen
der Bitwerte
der rechten roten LED nutzen lässt, um deren Helligkeit
zu verringern. Doch
bevor wir mit der Programmierung für den Taster B loslegen, gilt es noch zu klären,
wie es sich mit den Bitwerten zum Heraufzählen verhält. Die rechte
rote LED
verdunkelt sich nämlich nur, wenn sich der Spannungsabfall am Vorwiderstand RV
entsprechend vergrößert, während er sich gleichzeitig an der LED verringert.
Nachdem
wir beim Taster
A vom Bitwert 1010 bis auf 101 heruntergezählt haben,
müssen wir nun beim Taster B nun vom Bitwert 101 bis auf 1010 heraufzählen:
(Bild 56 – „Push
Down“-Helligkeitsregler für die rote LED) Wie
man sich auch überzeugen kann, funktioniert das obenstehende Programm „microbit_teil_04_prog_36.hex“
mit dem Quelltext „microbit_teil_04_prog_36.py“
einwandfrei, sodass sich nun beide Programme zusammenführen
lassen:
(Bild 57 – „Push Up
& Down“-Helligkeitsregler für die rote LED) Bei
der Zusammenführung muss man allerdings bedenken, dass der Durchlaufzähler
beim erstmaligen Betätigen des Tasters A bei 1
anfängt zu zählen, um dann bei jedem weiteren Tastendruck weiter aufwärts
zu zählen. Beim
erstmaligen Betätigen des Tasters B hingegen fängt dieser
bei 10
an zu zählen, um dann aber bei jedem weiteren Tastendruck weiter rückwärts
zu zählen! Demzufolge
muss man also eine Fallunterscheidung machen und abfragen, ob einer
der beiden Taster
A und B zum ersten Mal betätigt wird. Dies ist stets dann
der Fall, wenn die Variable „push_up_counter“ = 0 ist! Je nachdem, ob der Taster A
oder B
gedrückt wurde, wird dann der Variablen
„push_up_counter“ entweder der Wert = 1
oder der Wert = 10 zugewiesen (siehe die beiden roten Kästen
oben im Bild). Das
zusammengeführte Programm „microbit_teil_04_prog_37.hex“
mit dem Quelltext „microbit_teil_04_prog_37.py“
funktioniert ganz gut, hat aber noch einen Schönheitsfehler, der gleich als
Nächstes behoben wird. Dabei
besteht der Schönheitsfehler
darin, dass beide Programmteile vom Taster A und B quasi nichts
voneinander wissen und still vor sich hin arbeiten. Wenn
man beispielsweise mit dem Taster A die Helligkeit der rechten roten LED
nach oben fährt und beim „Up- and Down“-Zähler „5“
angekommen ist, dann aber feststellt, dass die Helligkeit zu hoch eingestellt
ist, den Taster
B drückt, um die Helligkeit eine Stufe zu reduzieren, der stellt
überrascht fest, dass es wider Erwarten eine weitere Stufe aufwärtsgeht,
der „Up- and
Down“-Zähler auf „6“ springt, bevor es beim nächsten Tastendruck
auf den Taster
B tatsächlich wieder rückwärts geht. Ähnlich
verhält es sich bei und nach dem Programmstart. Beim Programmstart oder einem Reset
des Programms
mit dem rückwärtigen „Reset“-Taster, leuchten zunächst beide roten LEDs,
wobei dann kurz darauf die rechte rote LED aus geht. Wenn man dann die maximale
Helligkeit
einstellen will, dann muss man sich normalerweise mit dem Taster A
bis zur Helligkeitsstufe „10“ vortasten, was natürlich dauert und nervt. Schneller
lässt sich die maximale Helligkeitsstufe
„10“ erreichen, indem man direkt
nach dem Programmstart
oder Reset
die Taster
B drückt, um rückwärts zu gehen, um vom „Up- and Down“-Zähler
„1“ direkt rückwärts gerichtet auf
die „10“
für maximale Helligkeit zu springen. Das gelingt aber nicht
wie erwartet auf Anhieb, weil der „Up- and Down“-Zähler zunächst erst mal auf die „10“
springt, um dann bei einem weiteren Tastendruck auf den Taster B
dann endlich den „Overflow“, d.h. „rückwärtigen Überlauf“,
auszulösen, sodass sich jetzt erst die maximale Helligkeit an der rechten roten LED
einstellt. Da
es sich bei allen Schönheitsfehlern in Wirklichkeit nur um einen
Schönheitsfehler
handelt, nämlich den, dass das Hoch- und Runterzählen mit den beiden Taster A und B
nicht aufeinander abgestimmt ist, lässt sich dieser auch „auf
einen Schlag“ beheben. Aber immer dann, wenn die Dinge sehr einfach und komfortabel
funktionieren, funktionieren sollen, muss man extra viel Hirnschmalz investieren, wird es
hinter der Fassade, d.h. beim Programmieren kompliziert:
(Bild 58 – „Push Up
& Down“-Helligkeitsregler ohne Macken) Der
zuvor beschriebene Schönheitsfehler, nämlich dass bei jedem Tastendruck
erst einmal weiter vor- oder rückwärts gerechnet wird, lässt
sich beheben, indem man im Programmteil des Tasters A beim Hochzählen
immer wieder auch den Taster B abfragt (siehe roter Kasten im obenstehenden
Bild). Wird
während des Hochzählens
mit dem Taster
A plötzlich der Taster B gedrückt, dann wir erst einmal das bereits
veranlasste Weiterzählen nach oben rückgängig
gemacht, sodass ein weiterer Tastendruck mit dem Taster B eingespart
wird! Wenn
sich dabei der „Up- and Down“-Zähler auf der Position „1“ befindet, dann wird
durch das Drücken des Tasters B ein rückwärts gerichteter „Overflow“,
d.h. Überlauf ausgelöst (siehe grüner Pfeil vom roten zum grünen Kasten), sodass der „Up- and Down“-Zähler
auf die Position
„10“ springt und die rechte rote LED wieder hell leuchtet. - Wenn
nur der Taster
A mehrmals betätigt wird, dann wird nur das „else“-Statement ausgeführt (siehe roter Kasten), sodass der „Up- and Down“-Zähler
stets einen Schritt nach oben springt. Wenn
man das obenstehende Programm „microbit_teil_04_prog_38.hex“
mit dem Quelltext „microbit_teil_04_prog_38.py“
erstmals neu auf den „micro:bit“-Rechner hochgeladen und geflasht
hat, dann startet sich dieses automatisch, sodass in der Laufschrift „Start
…“ angezeigt und die rechte rote LED ausgeschaltet
wird. Dabei befindet sich der „Up- and Down“-Zähler auf der Position „1“,
die aber nach dem Programmstart nicht angezeigt wird. a) Welcher
Taster
muss mehrmals nacheinander gedrückt werden, damit sich die rechte
rote LED
schrittweise zum immer helleren Leuchten bringen lässt? b) Welchen
Taster
muss man drücken, damit sich die rechte rote LED nach dem Programmstart
oder Reset
schnell zum hellen Leuchten bringen lässt, ohne dass man die
Helligkeit
in mehren Schritten hochfahren muss? c) Weshalb
muss man den Tasters
B direkt nach dem Programmstart oder Reset insgesamt zweimal
drücken, damit die rechte rote LED „auf einen Schlag“ hell zu leuchten
anfängt? Fazit Die
ungewöhnliche Methode „Eine leuchtende von Strom durchflossene
rote LED
auszuschalten, indem man diese kontaktlos durch einen anderen
Strom
stromlos macht!“ hat schon etwas Besonderes, Herausforderndes. Dabei
ist die Methode
„Strom
ausschalten, Lampe leuchtet!“ nichts anderes
als die Umkehrung
der ansonsten üblichen Praxis: „Strom einschalten, Lampe leuchtet!“. Das
ist dann so ähnlich wie in der Mathematik: Dort ist die Subtraktion nichts anderes als die
Umkehrung
der Addition
negativer Zahlen: (+5) –
(+2) = (-1)
*
[
(-5) + (-2) ]. Wichtig
ist also der Erkenntnisgewinn,
dass man einen Stromfluss unterbinden kann, indem man an den Anschlussklemmen der roten LED
eine Potentialgleichheit
zwischen den Spannungspotentialen „Plus“ und „Minus“ herstellt. Hier
geht es zu Antworten
der Fragen 5 bis 9. – 4.3 Wheatstone Messbrücke
|
|
|
|
[ Home ] [ zurück ] [ Seitenanfang ] [ Teil 3 ] [ Teil 5 ] |
|
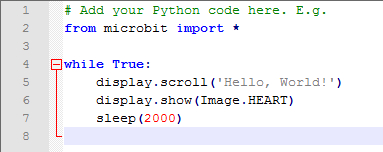

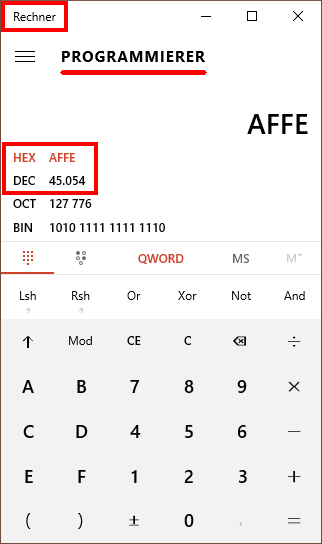
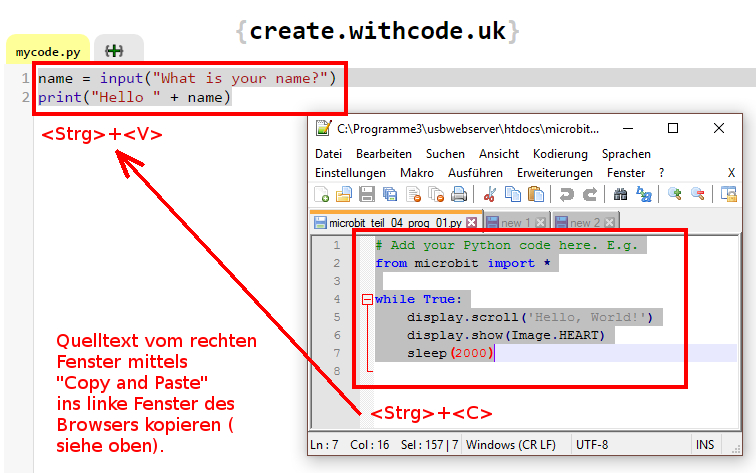
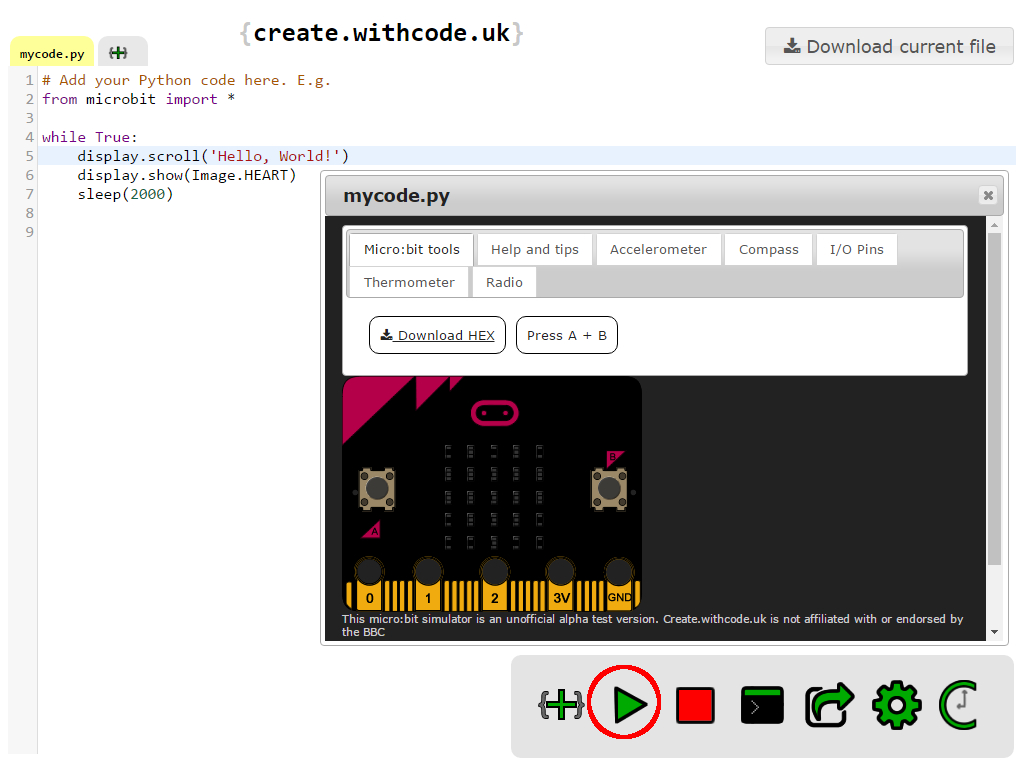
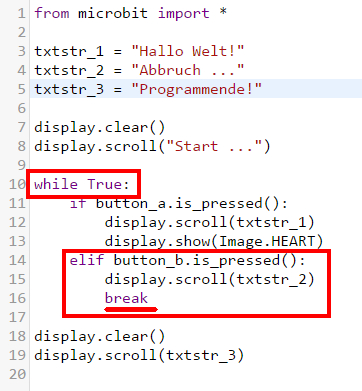
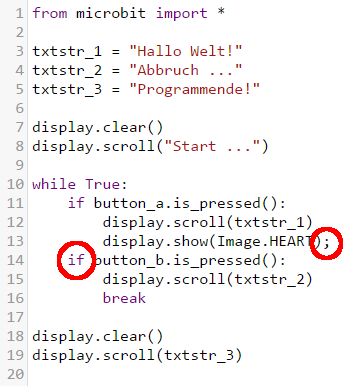
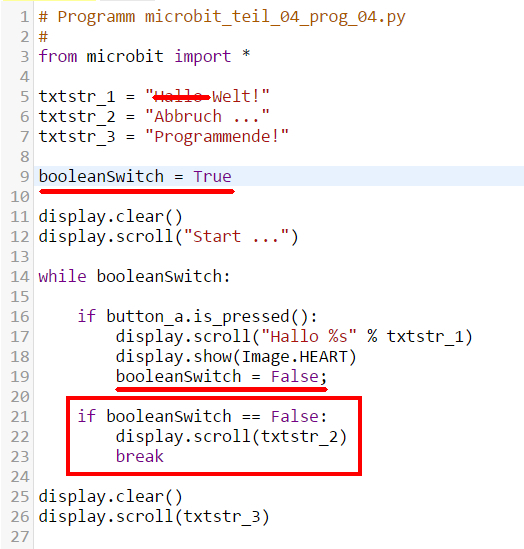
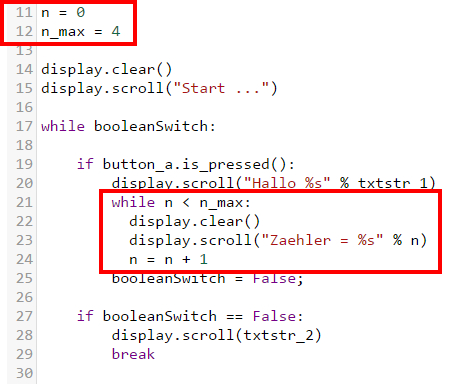
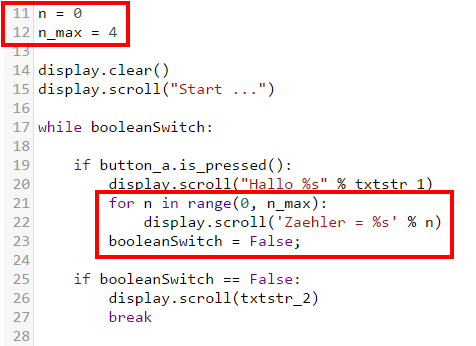
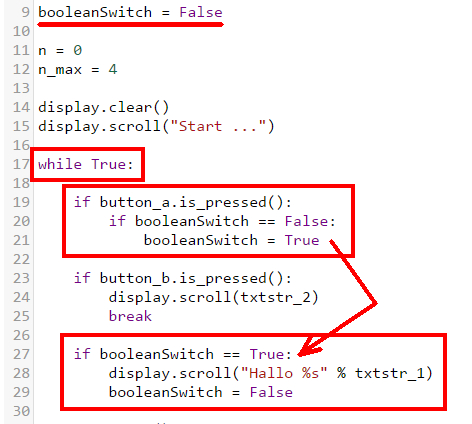
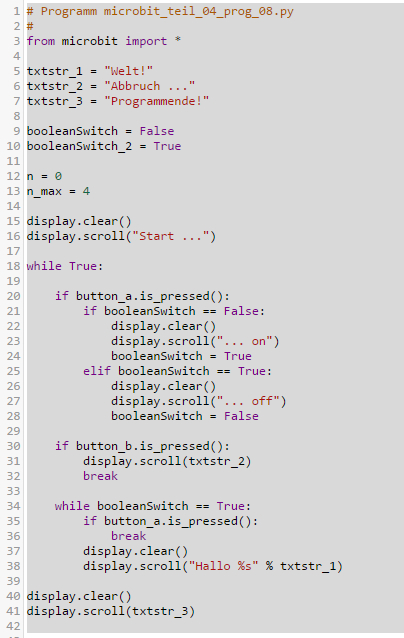
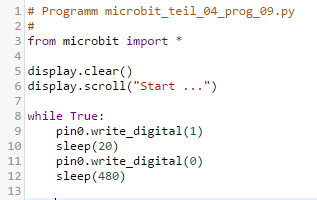
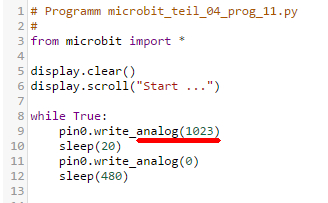
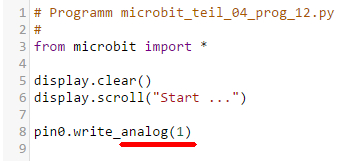
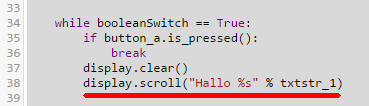
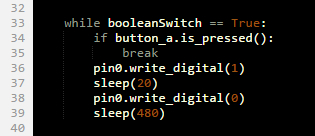
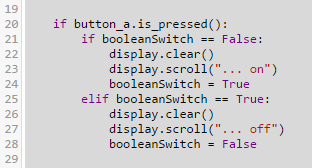
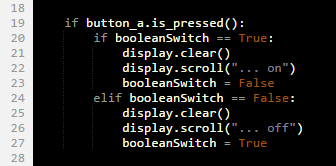
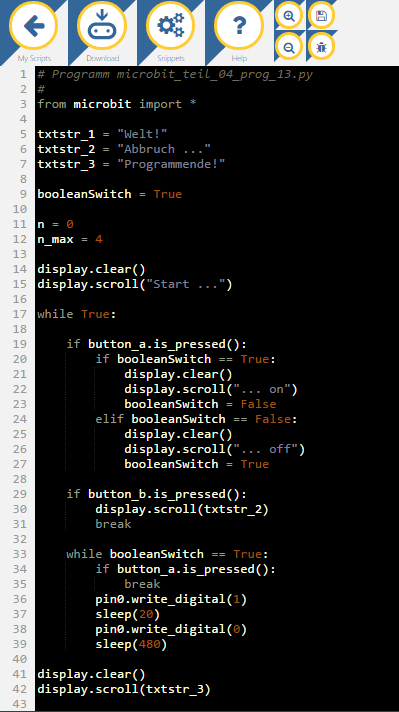
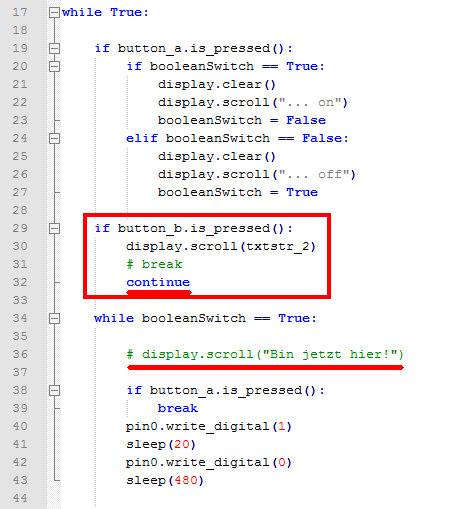
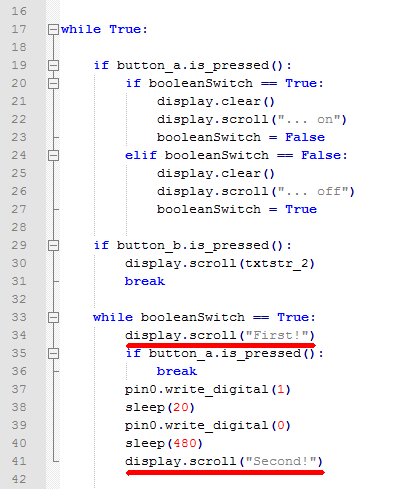
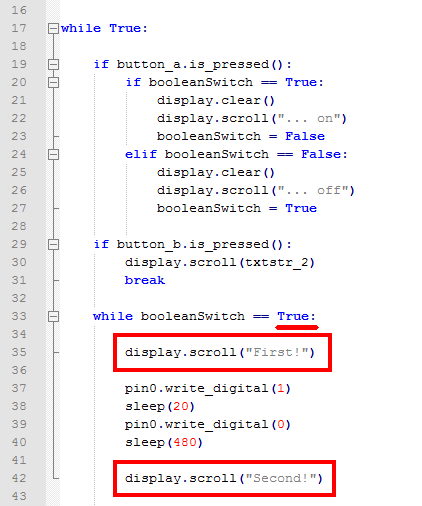
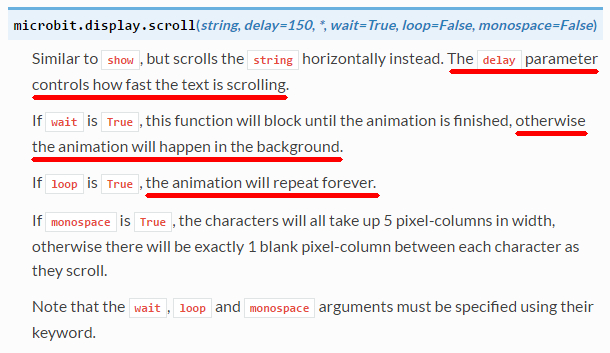
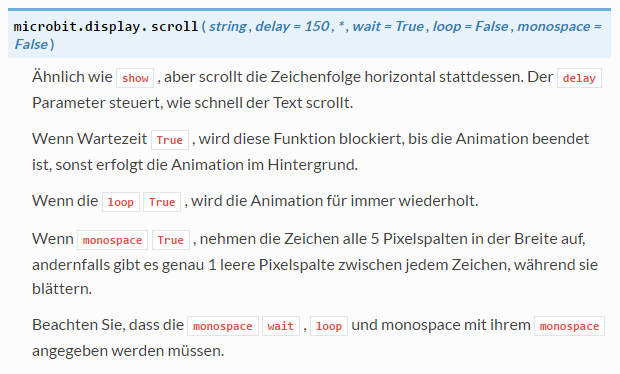
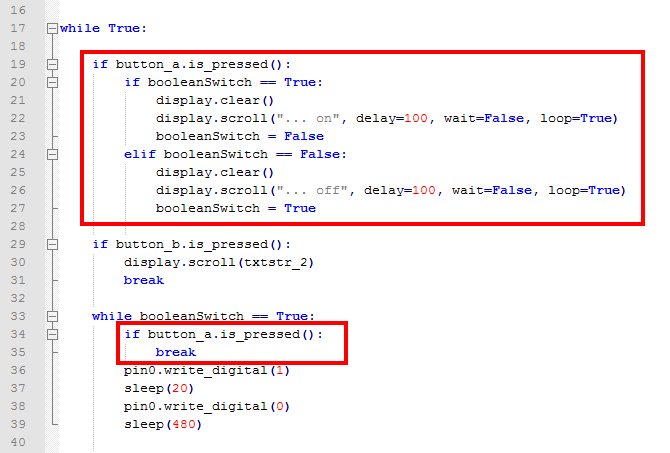
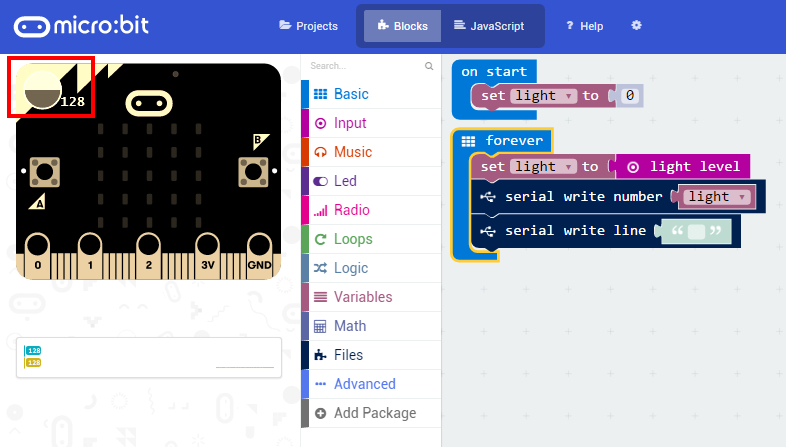
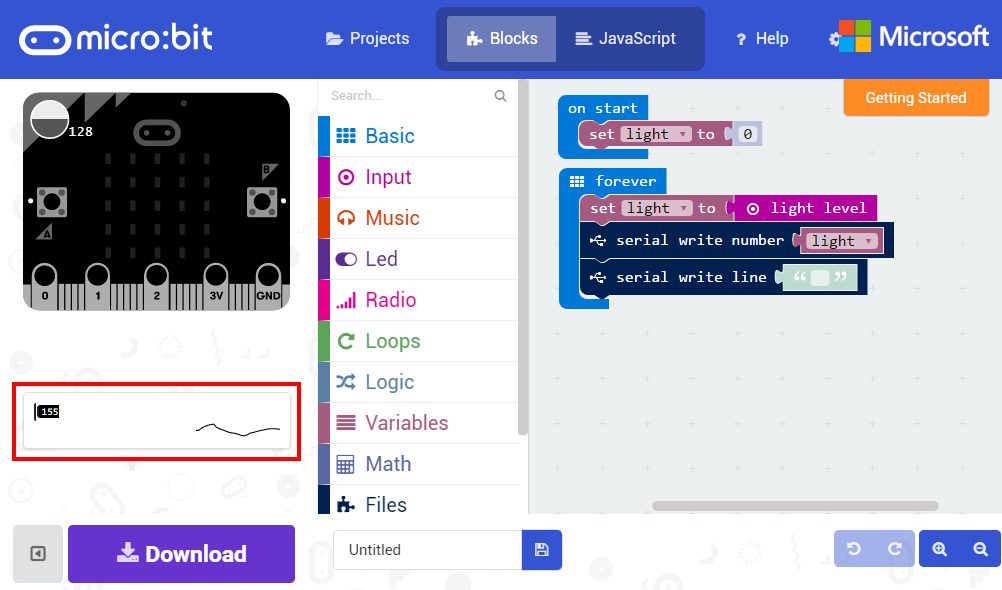
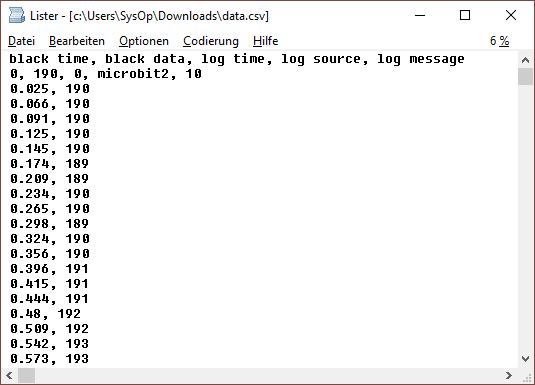
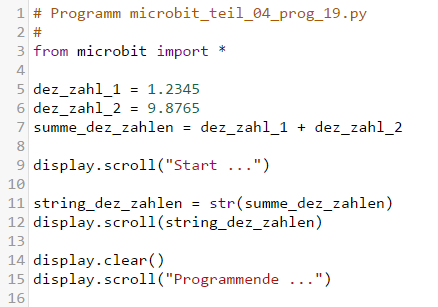
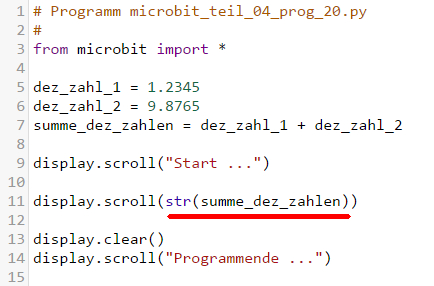


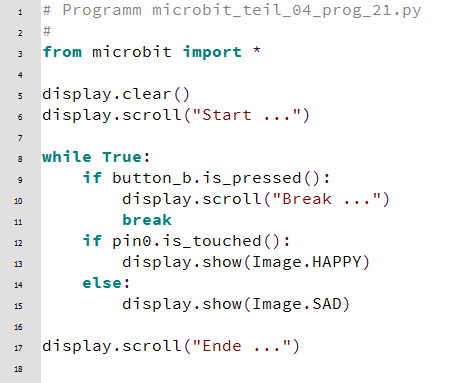
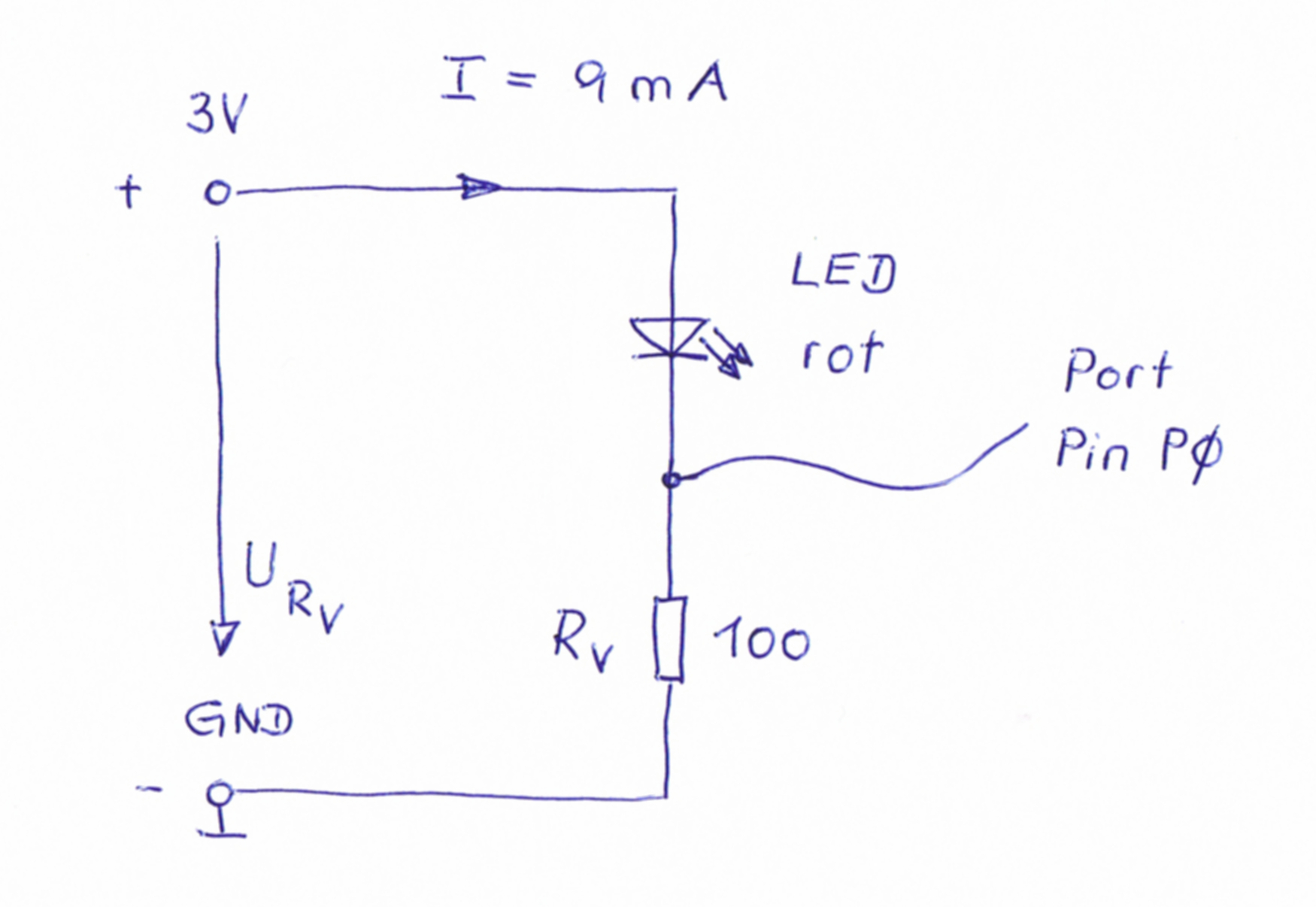
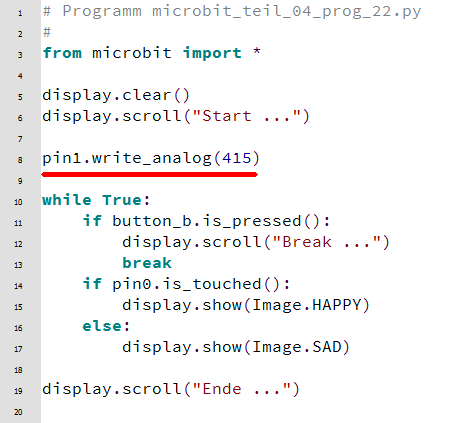
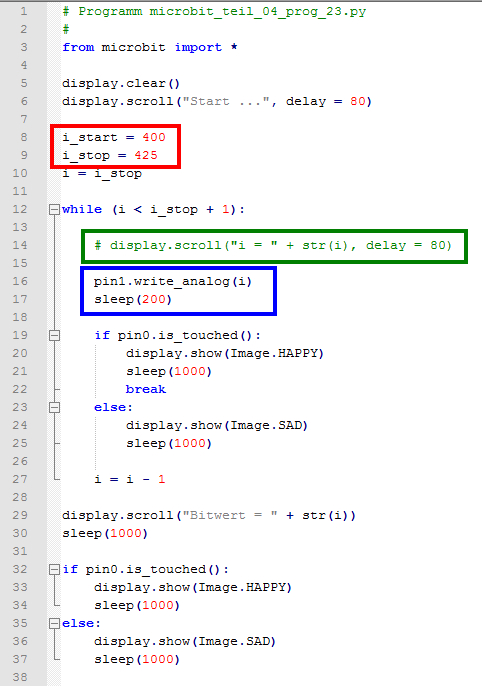

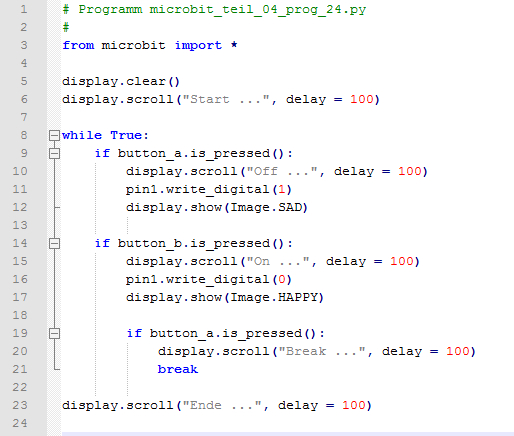
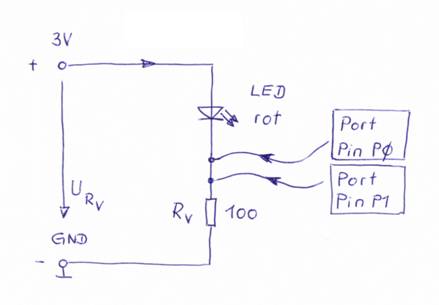
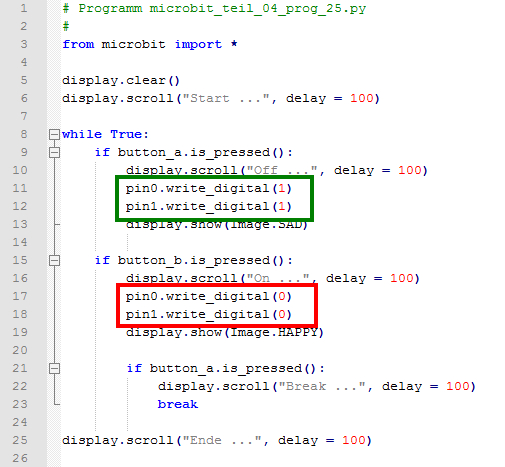
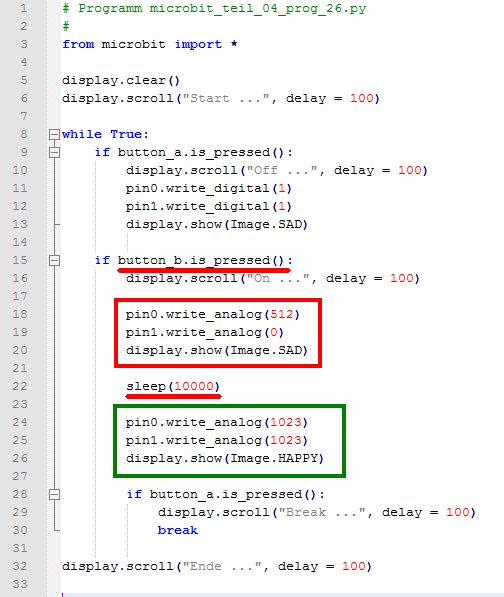
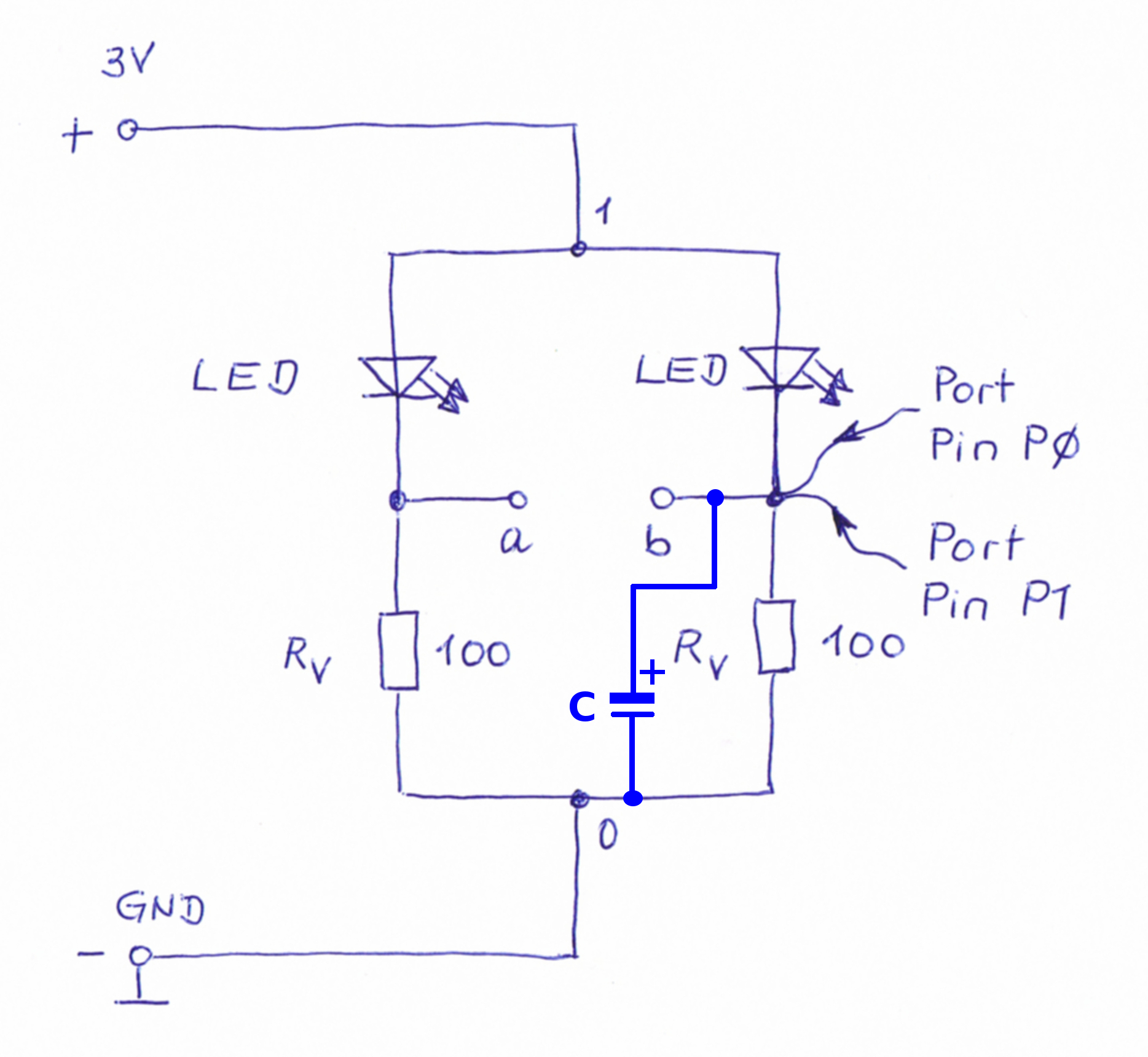
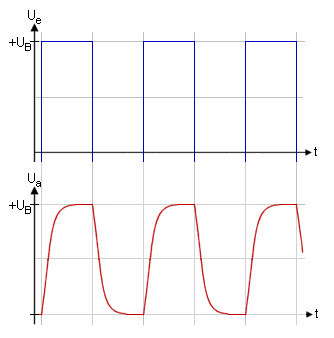
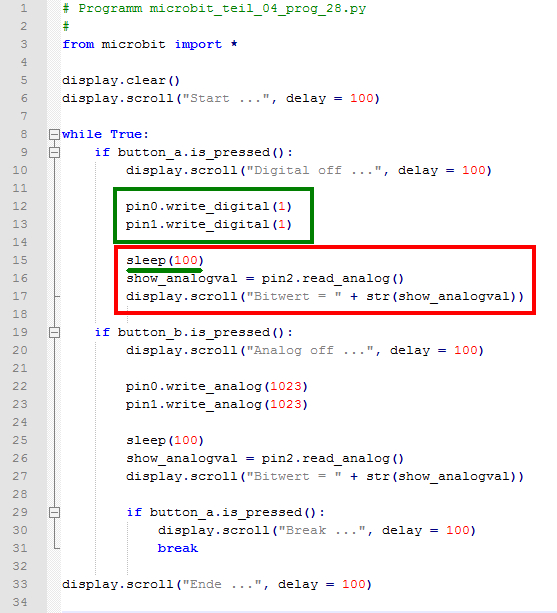
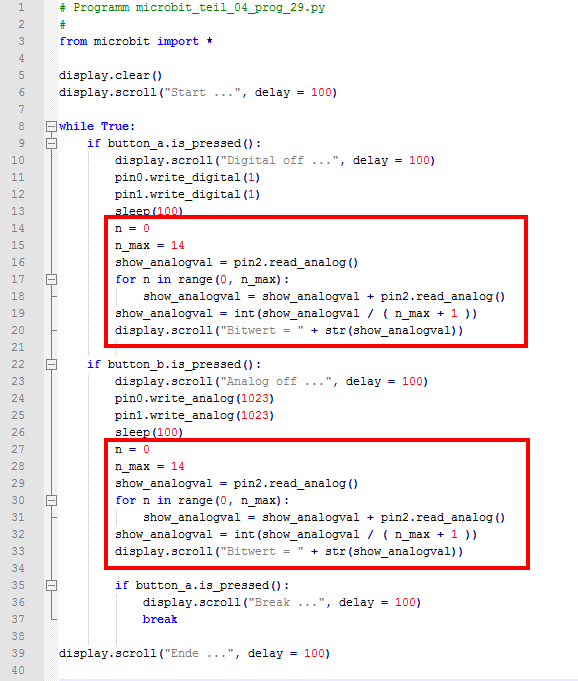
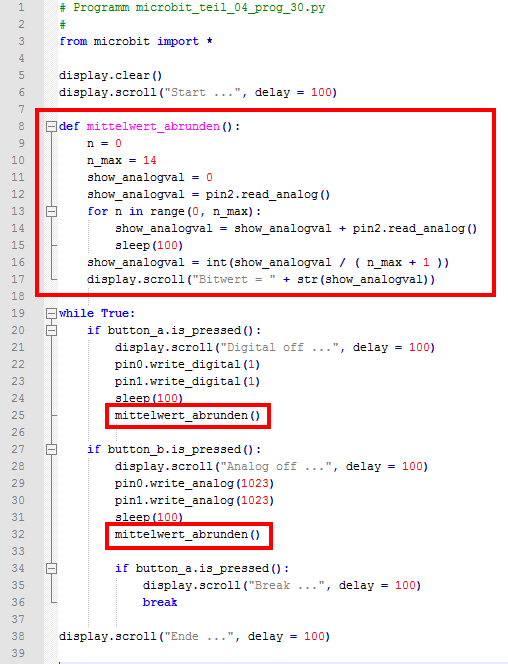
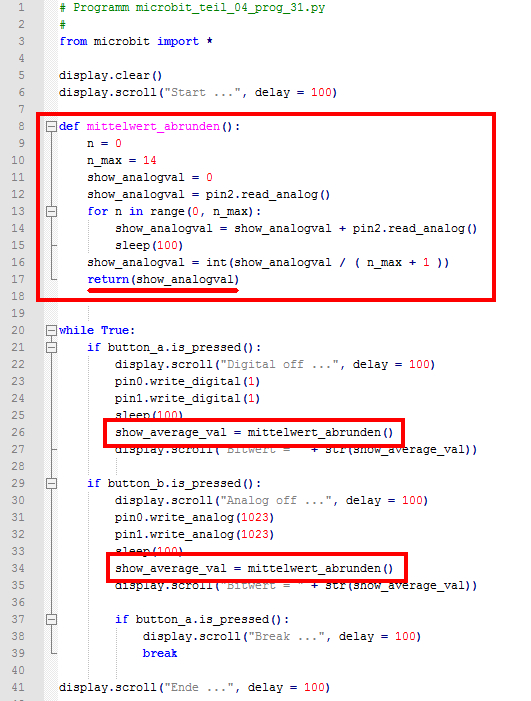
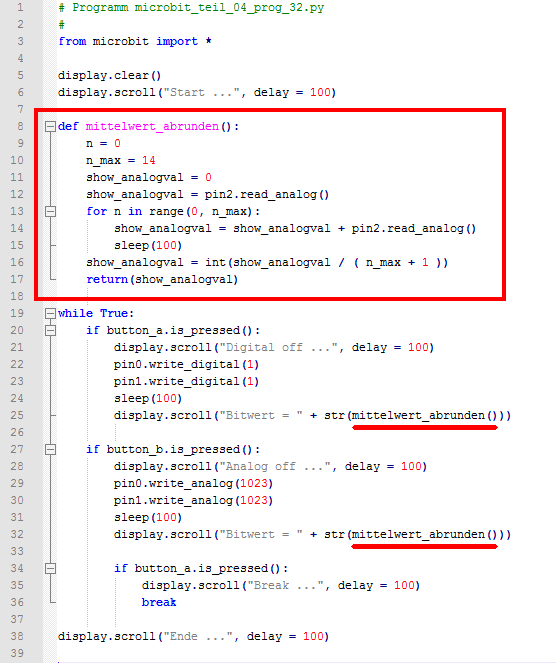
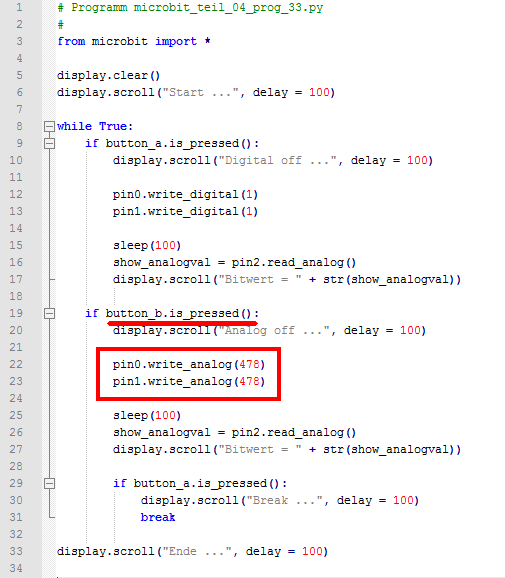
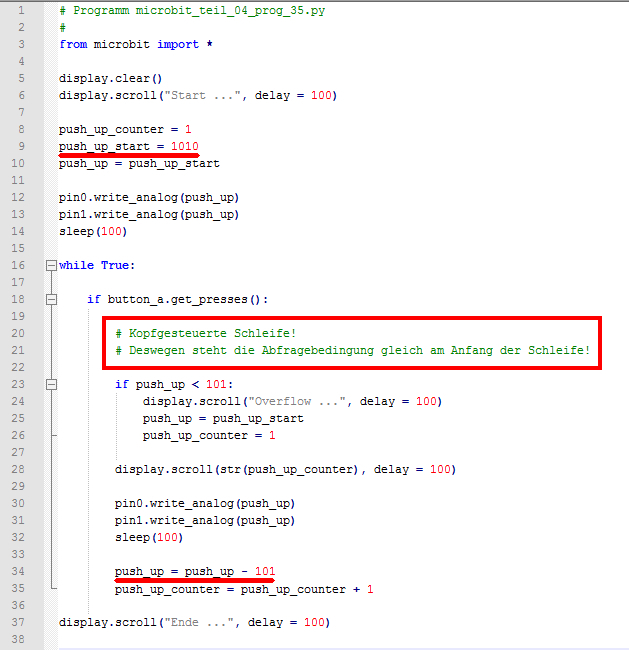

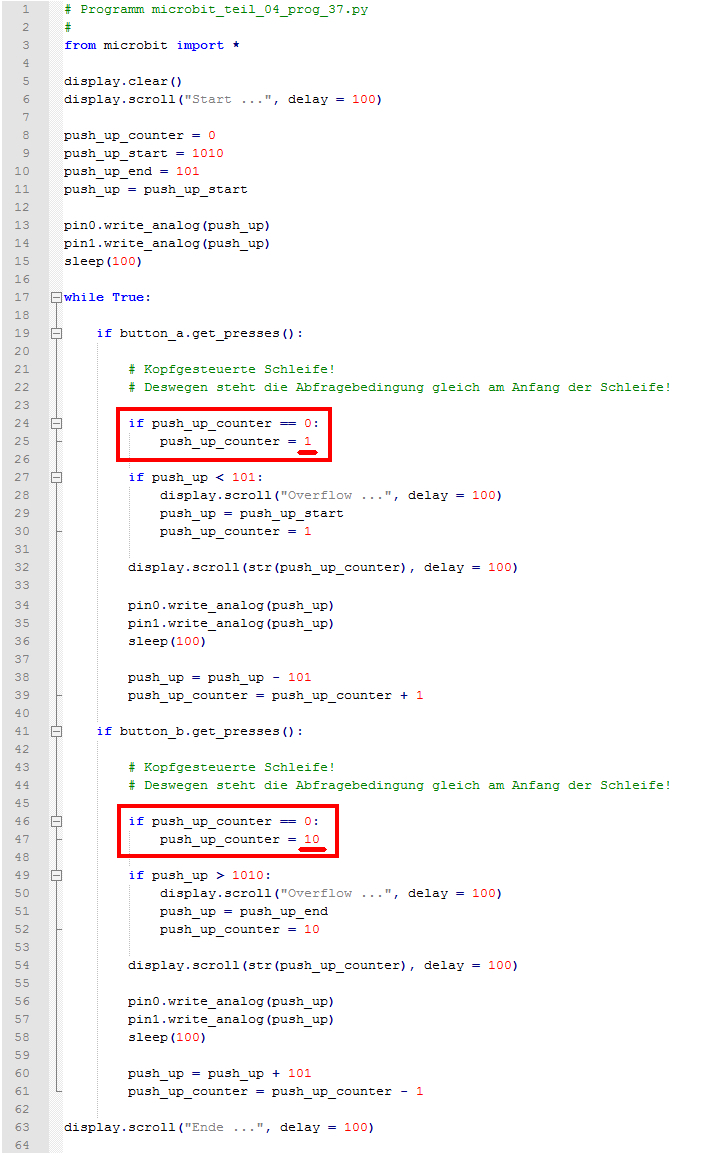
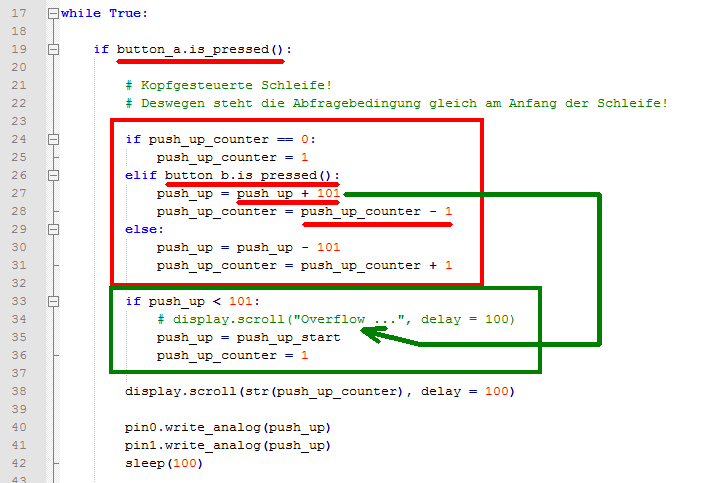
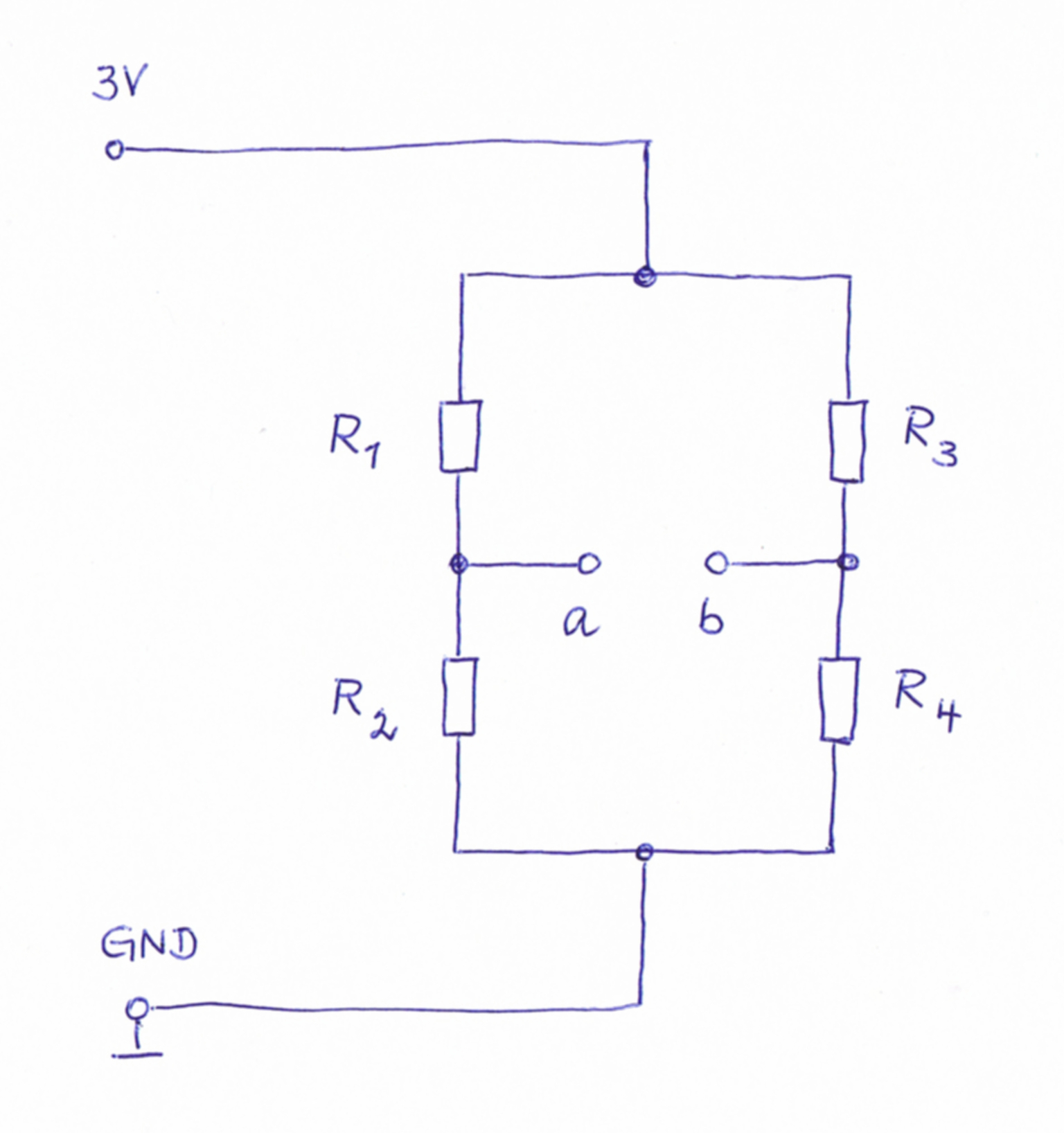
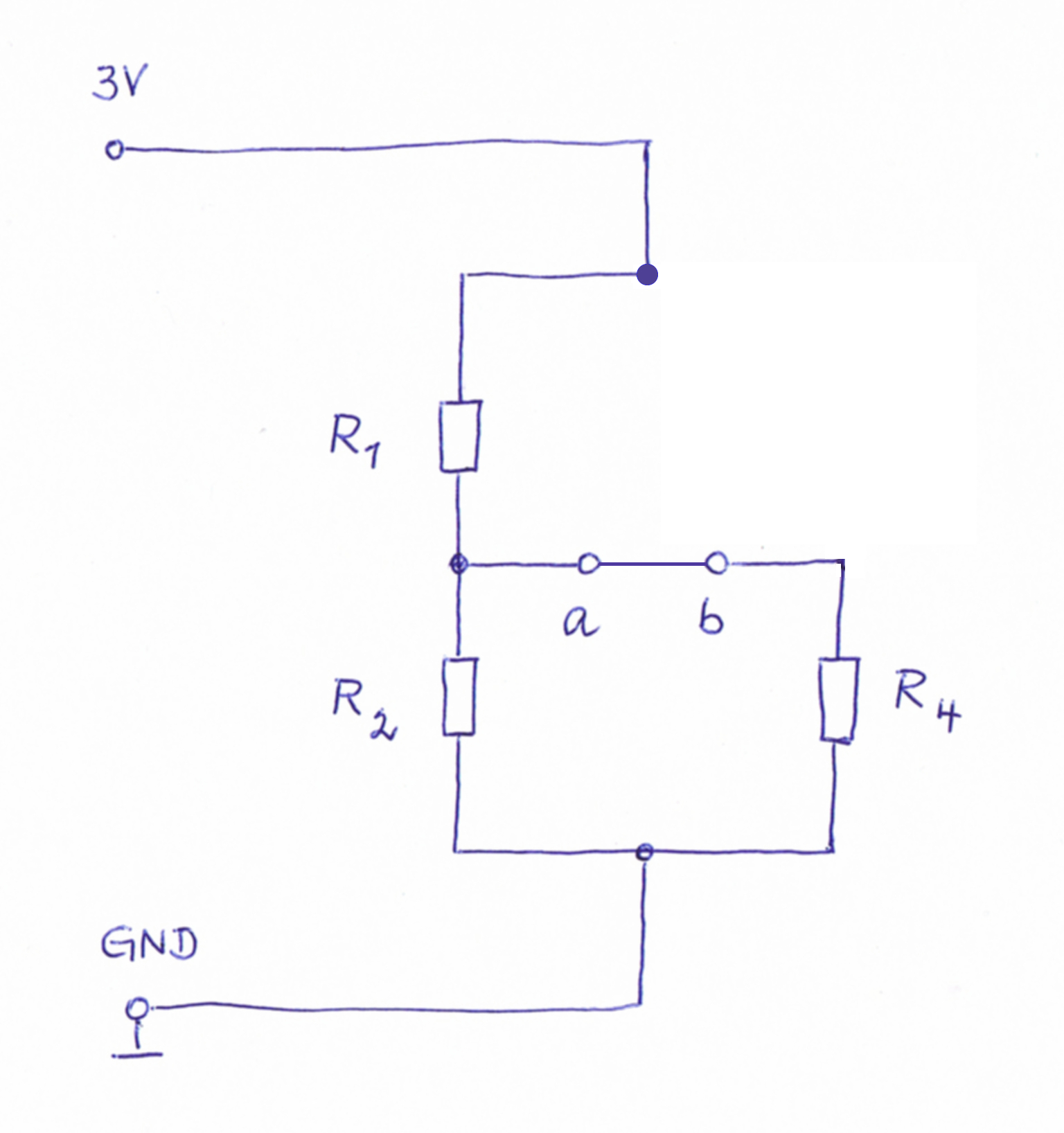
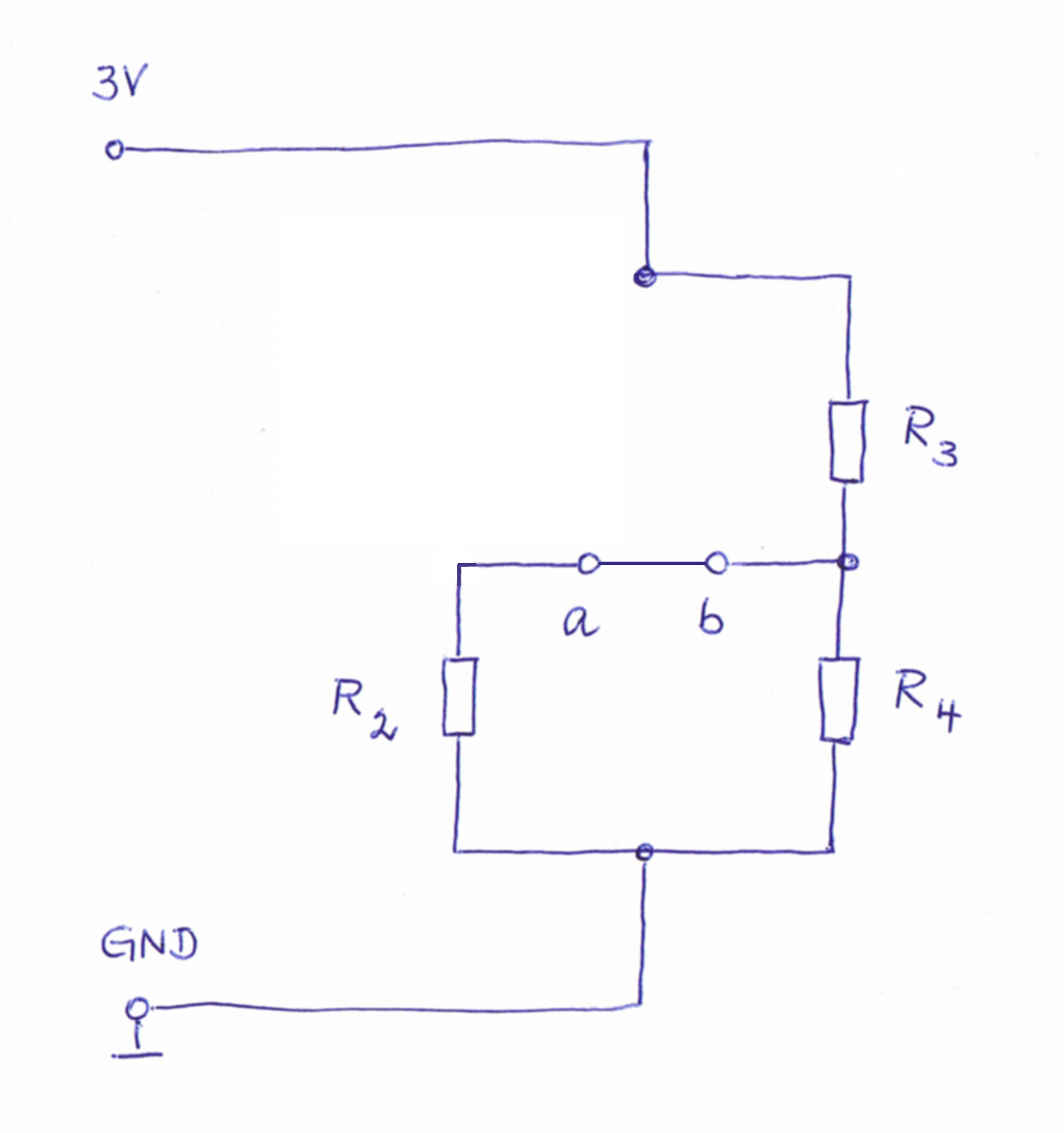
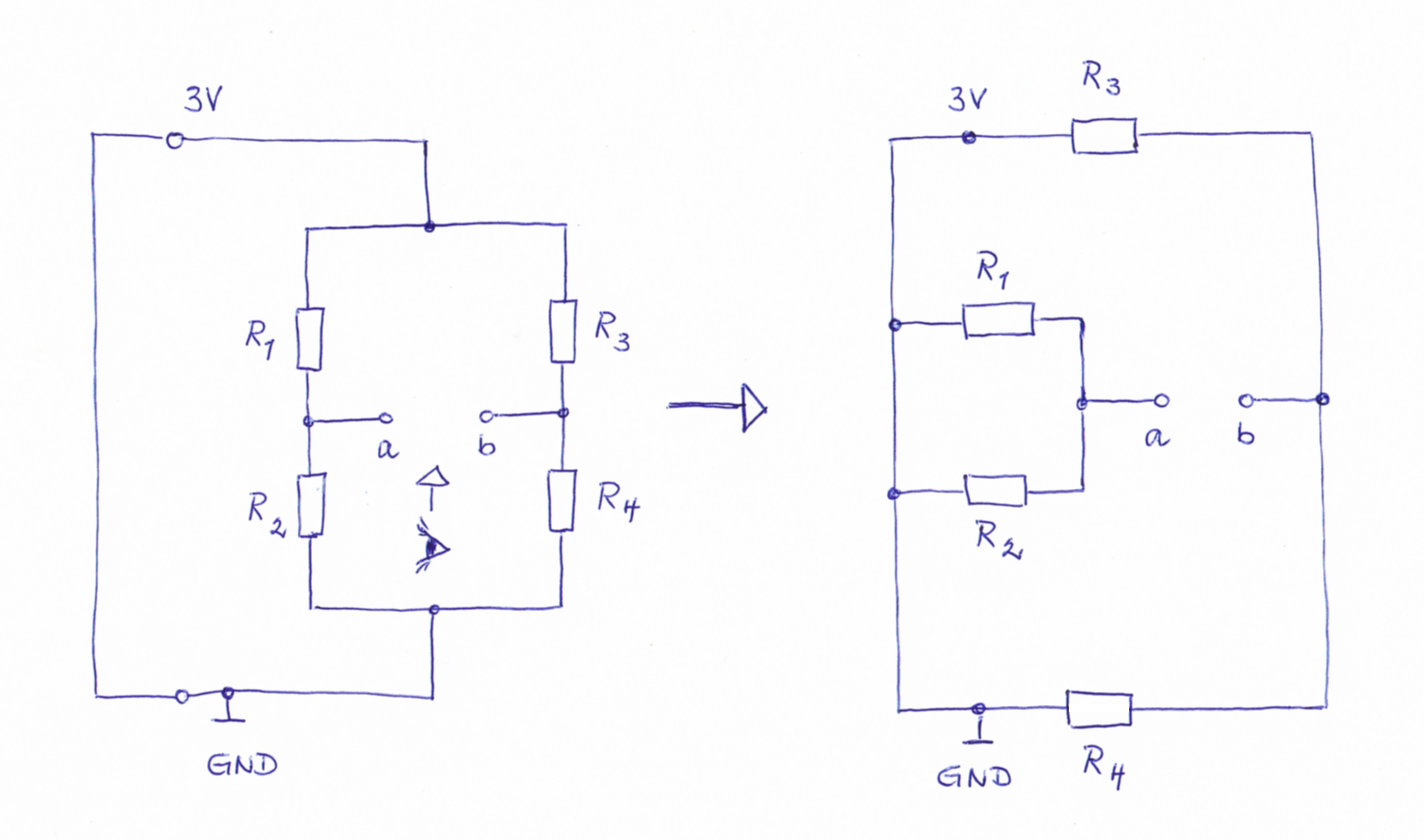
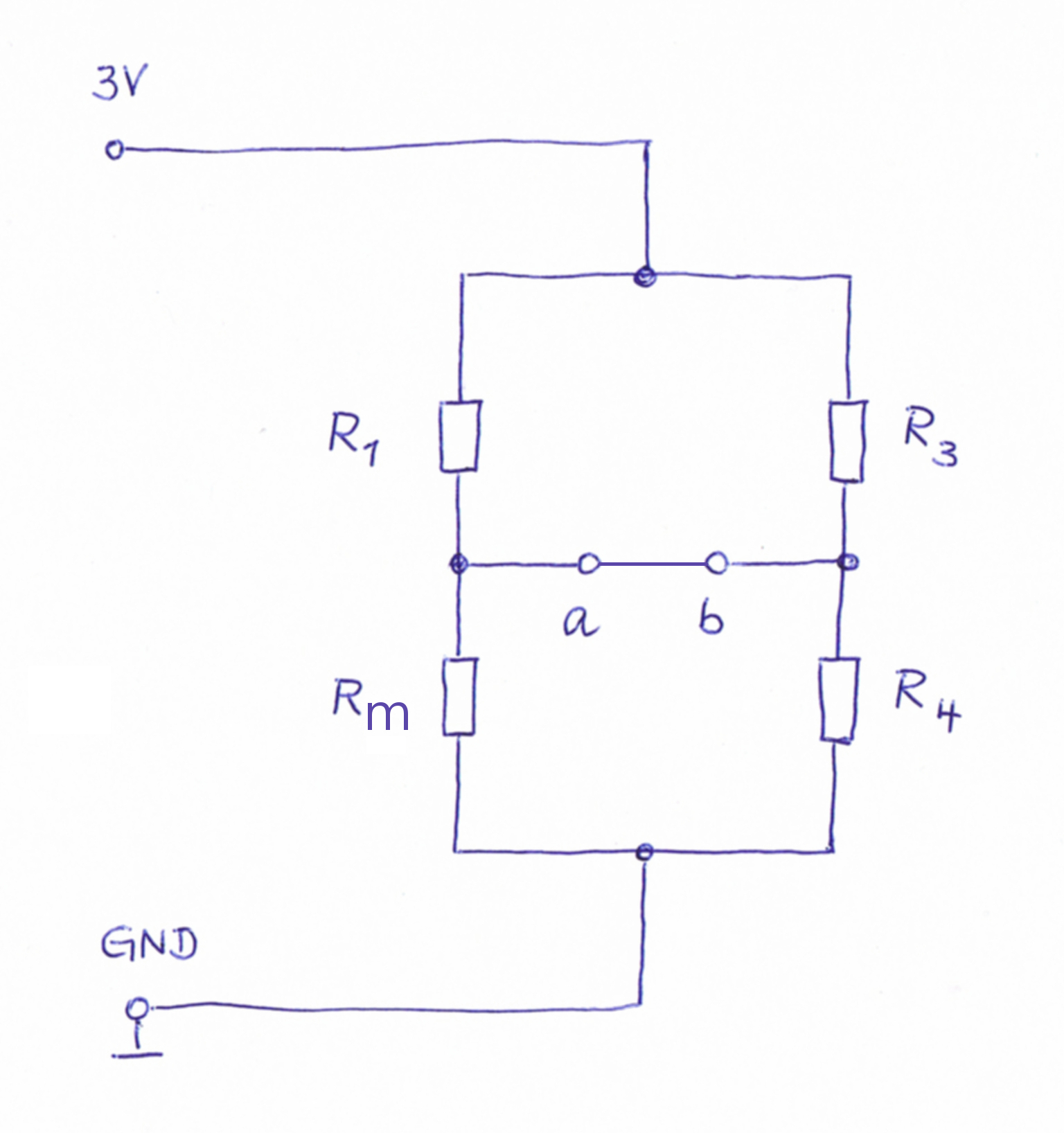
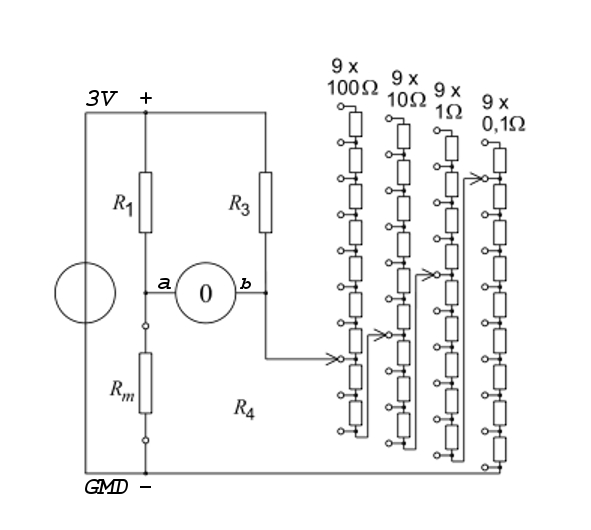

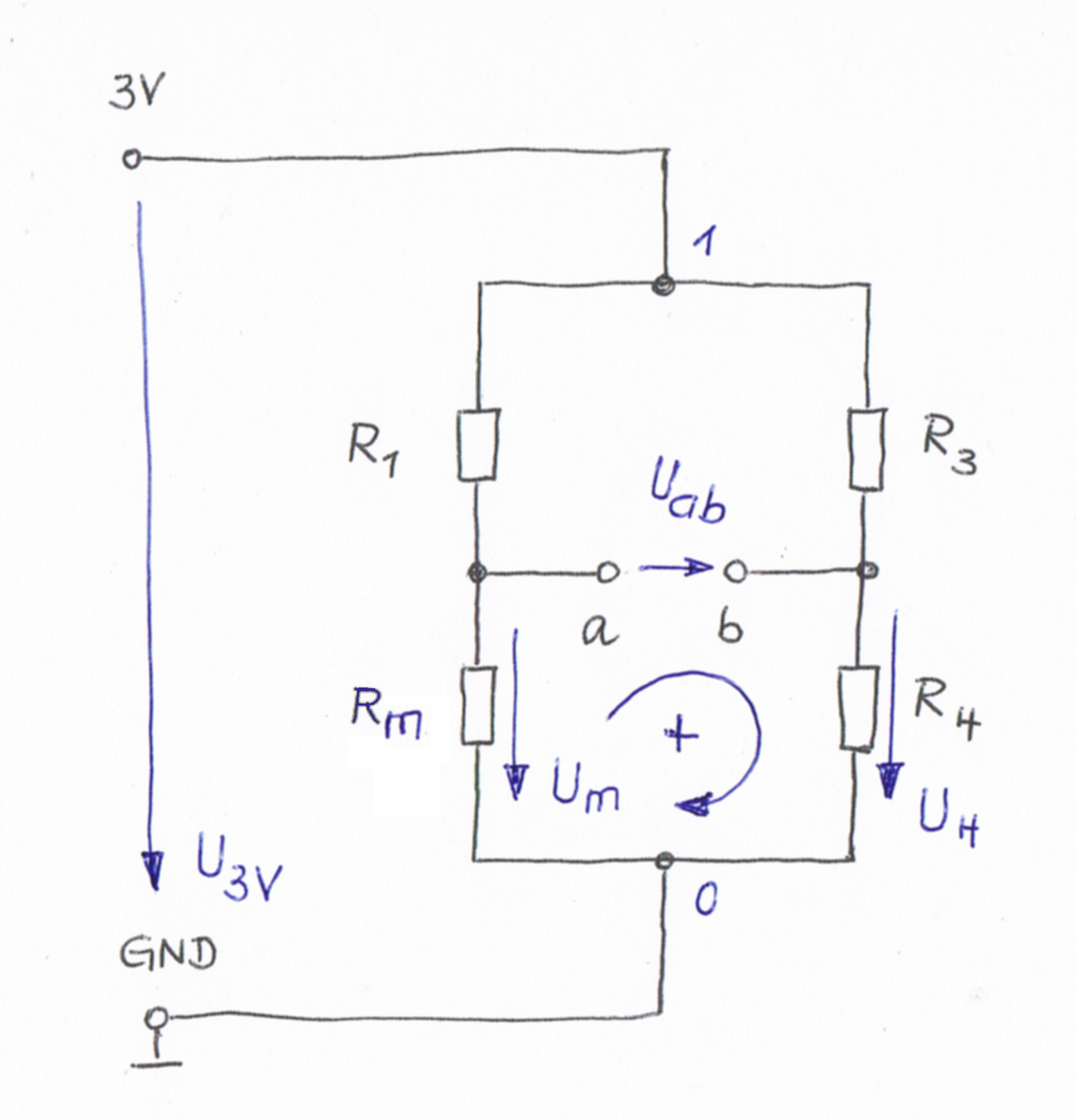
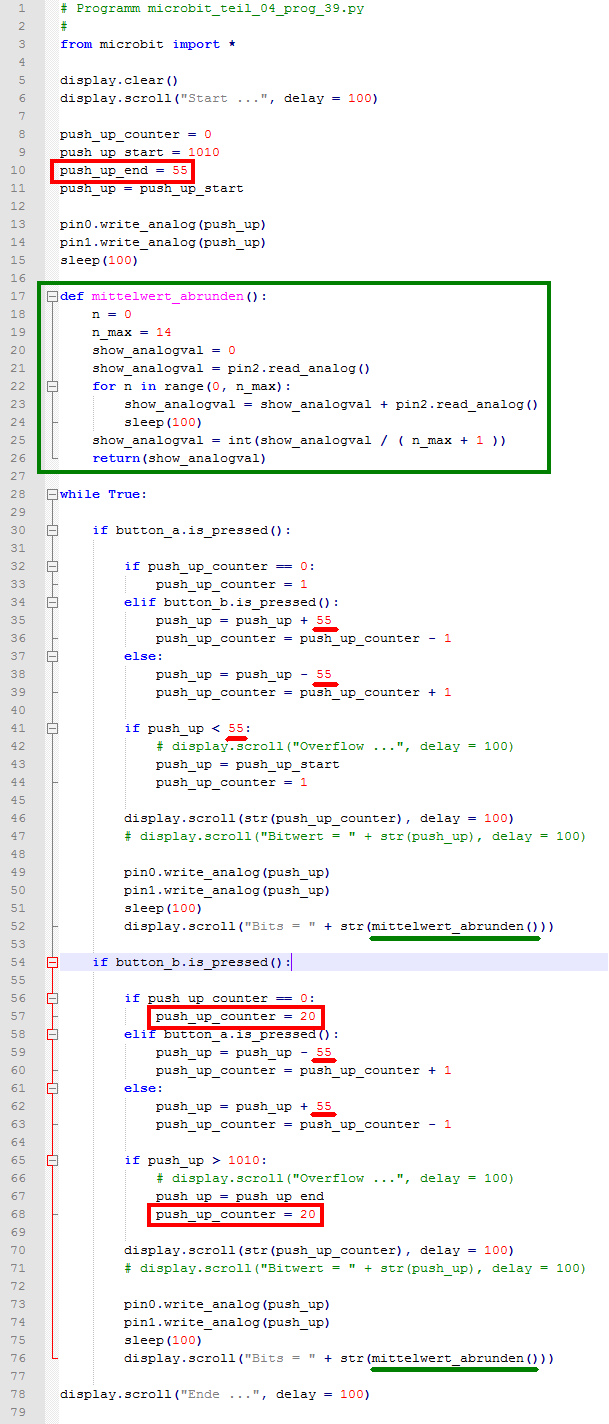
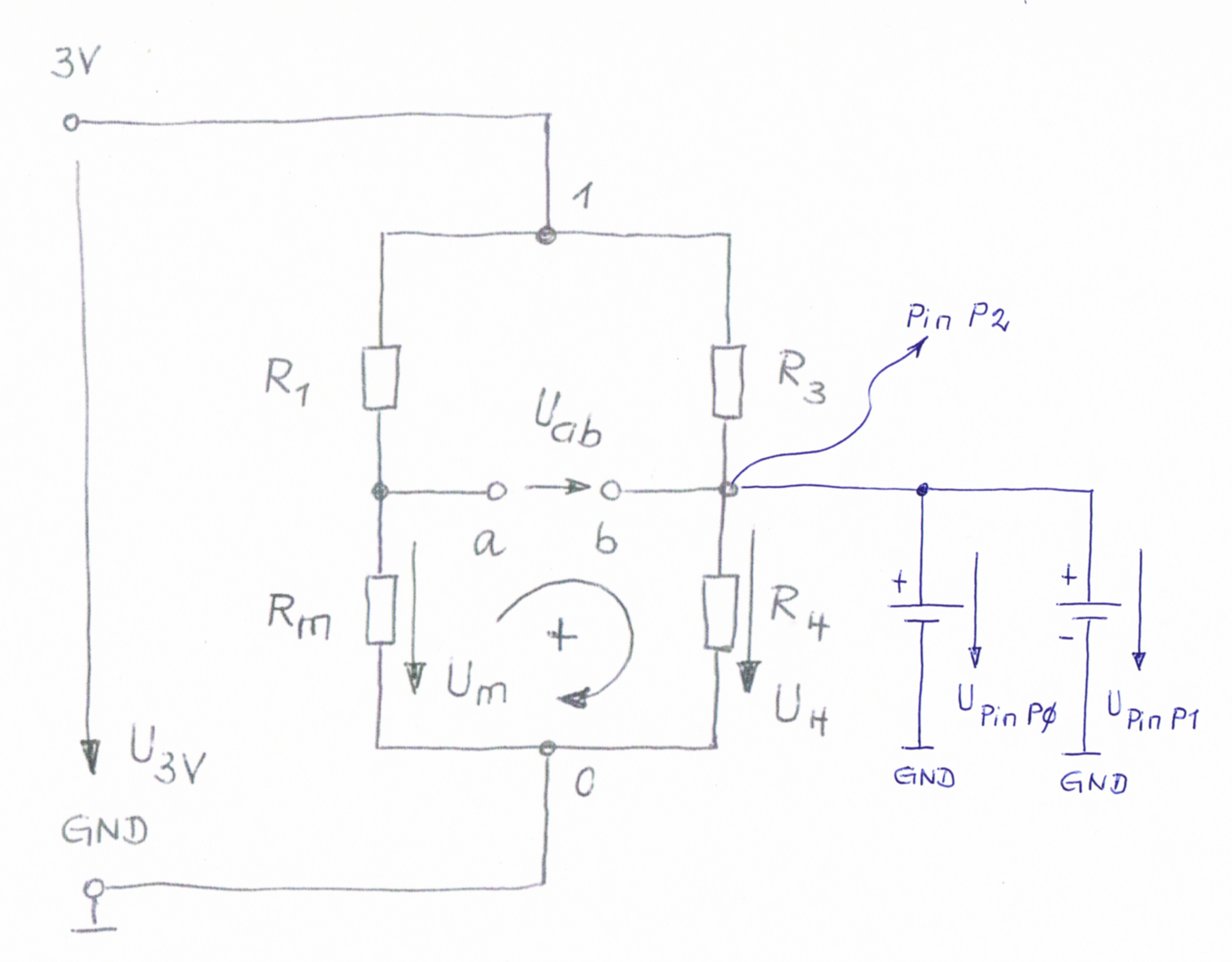
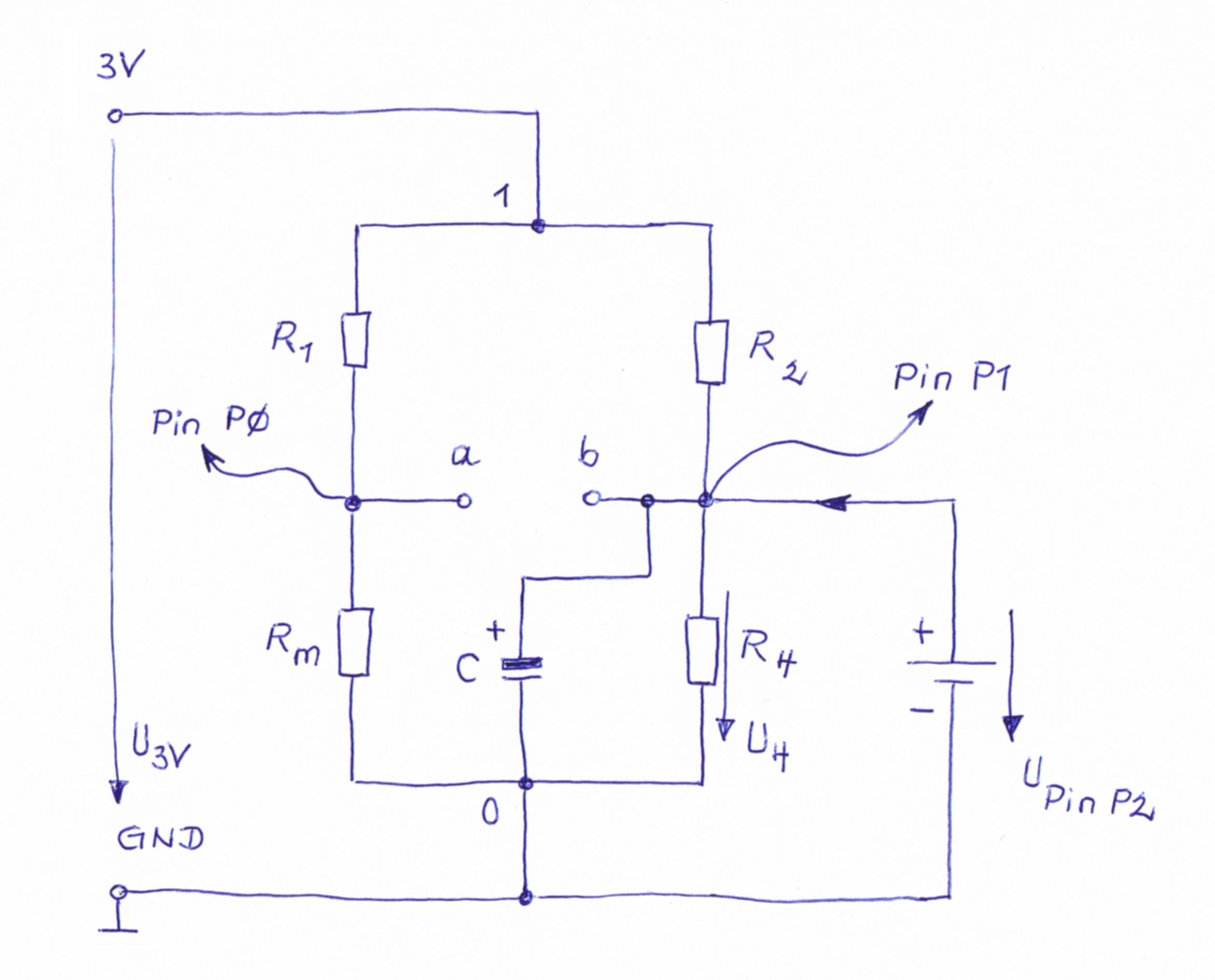
{kind=link}
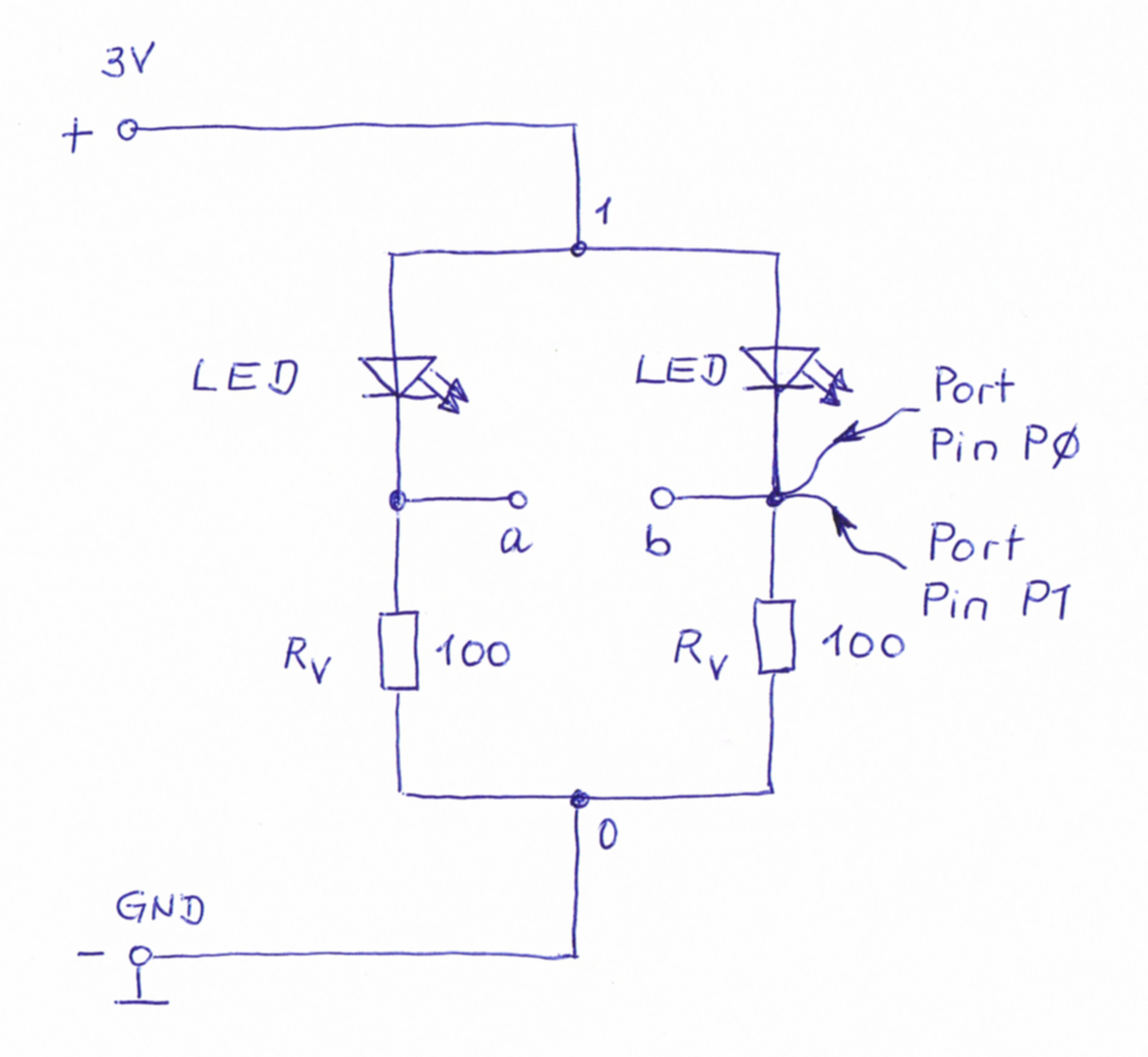{kind=link}
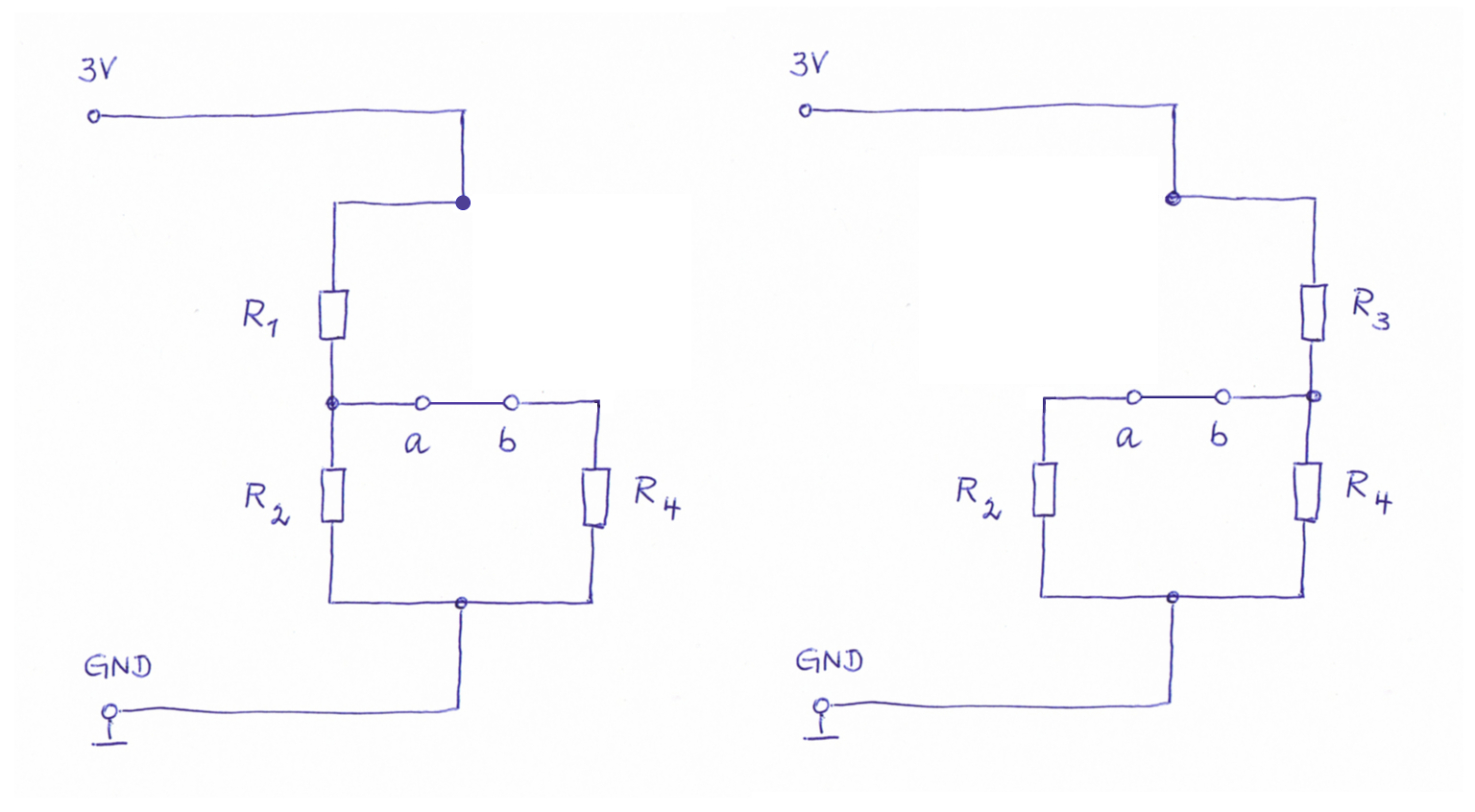{kind=link}